1
Изобретение относится к области автоматики и может быть использовано для управле|1ия промышленными роботами различпых гинов с электрогидравлическим приводом.
Известны устройства для позиционирования гидронрнвода, наиример промЕ шьяенного робота, содержащие последовательно соединенные 5лок задания программы, блок управления и электродвигатель, связанный передачей с золотником, втулка которого кинематически соединена с выходом силового гидропривода.
Использование в таких устройствах аналогового датчика обратной связи не всегда позволяет получить необходимую в ряде случаев высокую точность остановки гндропрнвода (иенолнительиого органа).
Цель изобретения - повышение точности позиционирования. Это достигается тем, что в устройство введены закренленные на валу золотника кулачки но числу позиций и столько же электромагннтных фиксаторов, каждый из которых установлен на ненодвнжном основании нротив соответствуюш,его кулачка, а обмотки электромагнитных фиксаторов нодключеиы к соответствующим выходам блока задания программы.
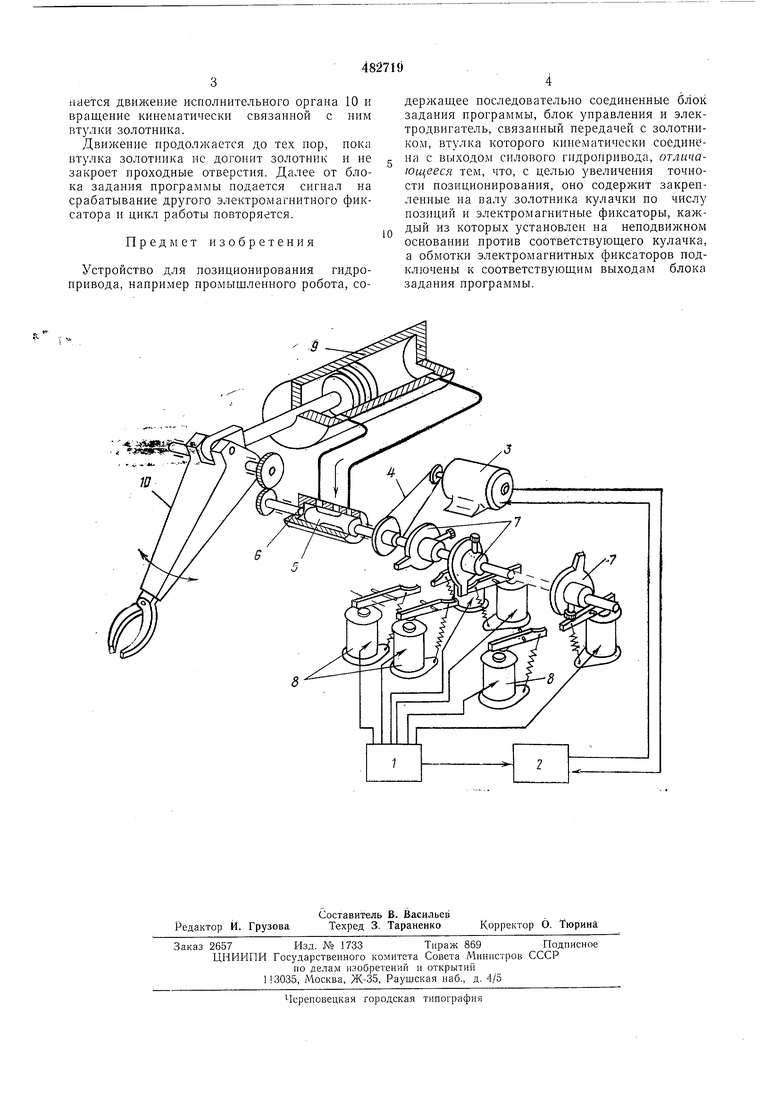
На чертеже представлена функциональная схема устройства для позиционирования гидропривода, например промышленного робота. Она содержит блок 1 задания программы.
блок 2 управления, электродвигатель 3. передачи 4, золотник 5, втулку б золотника, датчик обратной Связи, состоящий из ряда кулачков 7 и ряда неподвижно закрепленных электромагнитных фиксаторов 8, силовой гидропривод, например гидроцплиндр 9, н иснолпительный орган 10.
Работает устройство следующим образолг.
кулачок 7 выставляется в фиксированное положение в процессе настройки робо0та. От блока 1 задания программы подается сигнал на срабатывание одного из электромагнитных фиксаторов 8 и, с небольшой задержкой времени, сигнал на блок 2 управления. Электродвигатель 3, получив команду от бло5ка унравления, начинает ирн номощи передачи 4 поворачивать золотник 5. Одновременно вращаются кулачки 7 датчика обратной связи. Вращение золотника происходит до тех пор, пока один из кулачков не будет застоно0рен соответствующим электромагнитным фнксатором 8, на который подан енгнал от блока 1 задания программы. Движение золотника прекращается, и сигнал перегрузки электродвигателя 3 по каналу обратной связи воздействует на блок унравлеиия, который отключает электродвигатель. Как только золотник поворачивается, открываются проходные отверстия золотника и рабочая жидкость устремляется в еиловой гидроцнлиндр 9. Начнищется движение исполнительного органа 10 и вращение кинематически связанной с ним втулки золотника.
Движение иродолжается до тех пор, пока Пулка золотника пе догонит золотник и ие закроет проходные отверстия. Далее от блока задания программы подается сигнал на срабатывание другого электромагнитного фиксатора и цикл работы повторяется.
Предмет изобретения
Устройство для позиционирования гидропривода, например промышленного робота, содержащее последовательно соединенные блок задания программы, блок управления и электродвигатель, связанный передачей с золотником, втулка которого кинематически соедин(2иа с выходом силового гидропривода, отличающееся тем, что, с целью увеличения точности позиционирования, оно содержит закрепленные на валу золотника кулачки по числу позиций н электромагнитные фиксаторы, каждый из которых установлен на неподвижном основании против соответствующего кулачка, а обмотки электромагнитных фиксаторов подключены к соответствующим выходам блока задання программы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1974 |
|
SU481713A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ АДАПТИВНЫМ ПНЕВМОГИДРАВЛИЧЕСКИМ РОБОТОМ | 2008 |
|
RU2463156C9 |
| Устройство для управления манипулятором | 1985 |
|
SU1262450A1 |
| ГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2458261C2 |
| Следящий электропривод с компенсацией люфта | 1980 |
|
SU964574A1 |
| Устройство для автоматического позиционирования рабочего органа | 1979 |
|
SU865612A1 |
| УСТРОЙСТВО ФОРМОВАНИЯ | 2002 |
|
RU2251464C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2321534C2 |
| Способ управления электрогидравлическим следящим приводом | 1992 |
|
SU1834994A3 |
