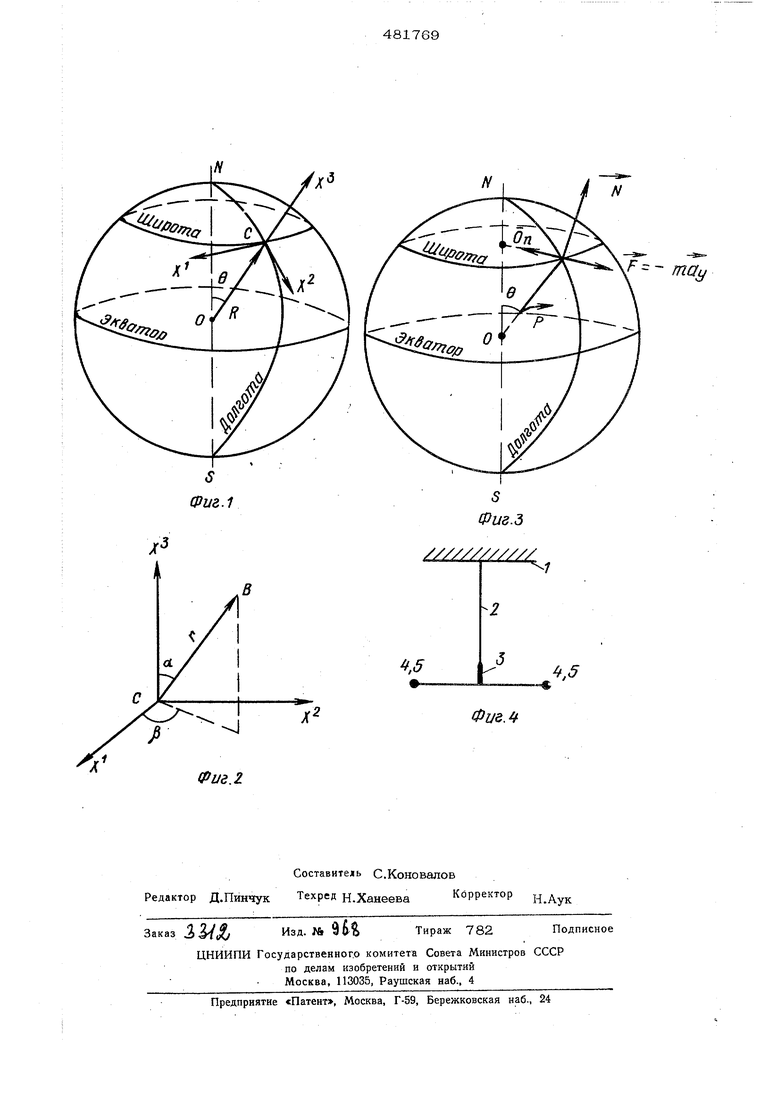
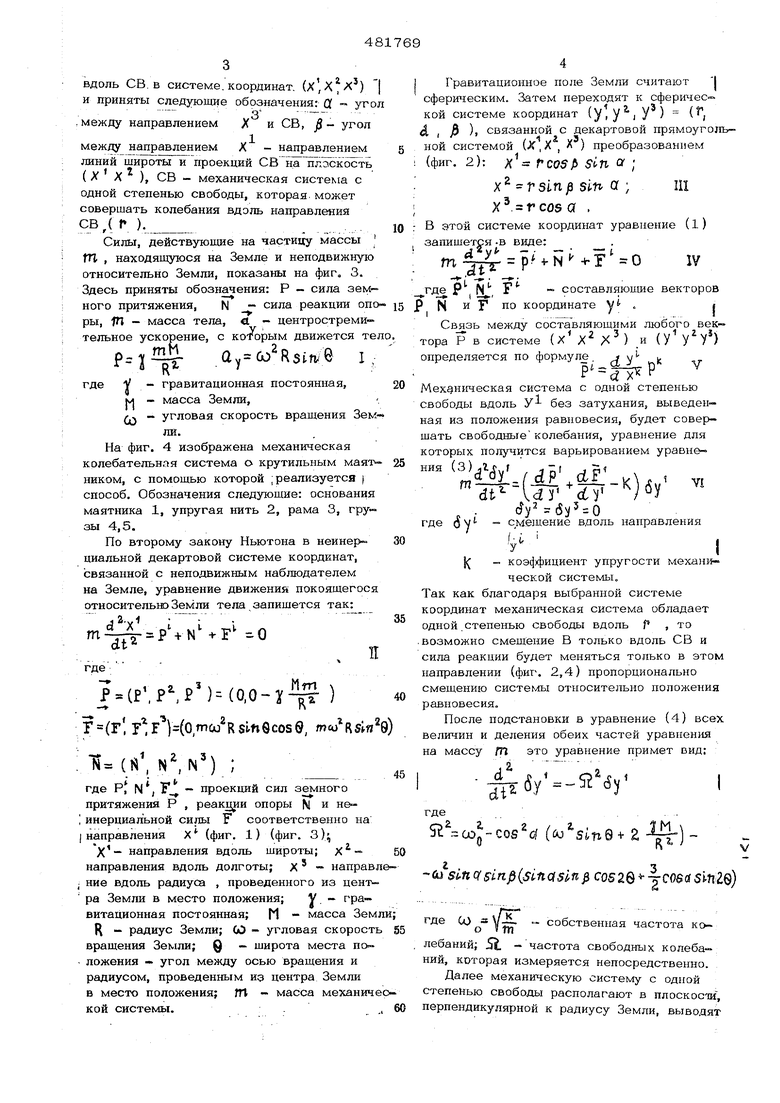
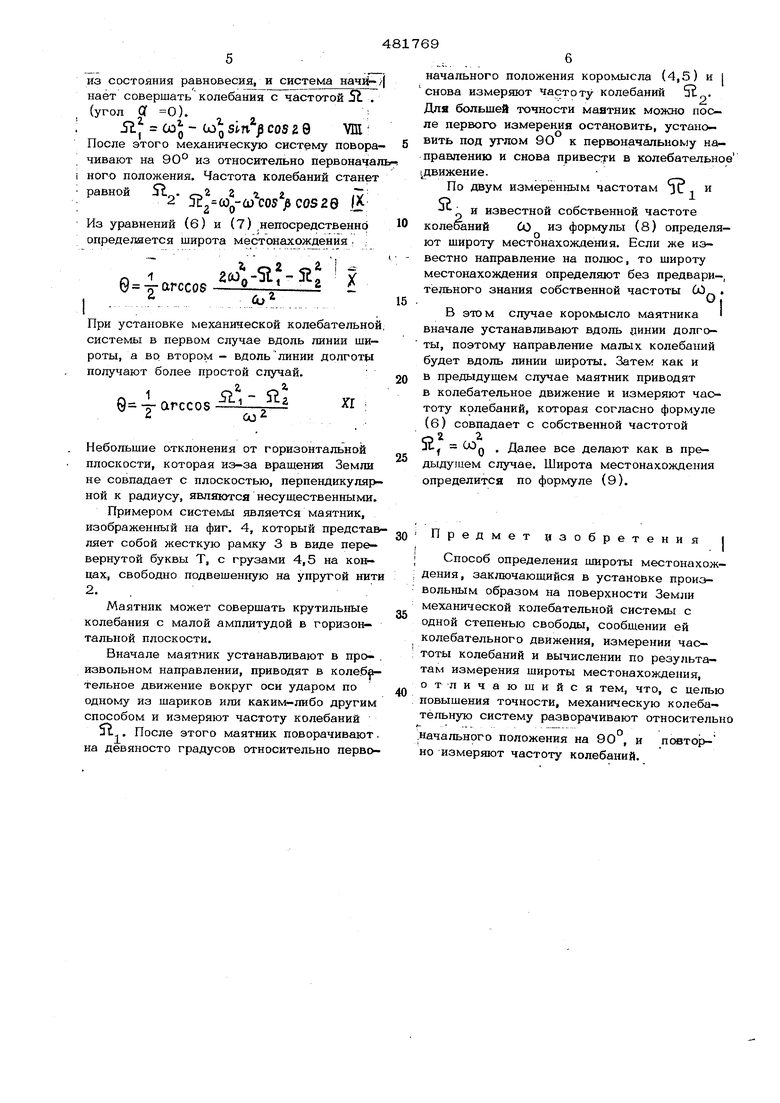
Изобретение относится к навигационной технике. Известен астрономический способ опред ления широты местонахождения, заключаю1ЦИЙСЯ в том, что широту месТОнахо.ждения онределяют по измеренным угловым коорди натам небесных тел. Этот способ, однако, зависит-от метеорологических условий и состояния окружаю щей среды. В инерциальной навигации известен способ определения широты местонахождения с системы гироскопов, по парамет рам которых онределяется широта. У такого способа сложная аппаратура и быстрое возрастание ошибок измерений с течением времени, вследствие чего необходима чистая коррекция системы какик либо методом. Известен способ определения широты местонахождения, основанный на определении ускорения силы тяжести с помощью механической колебательной системы с одной степенью свободы (физического маятника); механическую систему приводят в колебательное движение, измеряют частоту колебаний, и по измеренному значению определяют широту местонахождения. У этого способа возникают погрешности вызванные флюктуациями силы тяжести. Целью изобретения является точности определения. Это достигается за счет введения one- рацш-1 разворота механической колебательной системы на 90° относительно первоначаль/ного положения и повторном измерении частоты колебаний.. На фиг. 1 изображен земной шар и приняты следующие обозначения: О - центр , N - северный полюс, S - южный С , место, широту которого полюс, X ) - декартова определяют ( X система координат в точке С такая, что X направлена вдоль линии широты, X -вдоль линии долготы, X - вдоль радиуса, Q - угол между осью вращения Земли ц радиусом Земли, проведенным в место нахох дения С, R - радиус Земли. На фиг. 2 показана ориентация механической системы с одной степенью свободы вдоль СВ. в системе, координат, (х , ) и приняты следующие обозначения: d - уго 2 --.между направлением X и СВ, jS - угол между направлением направлением линий широты и проекций СВ на плэскЪсть (XX ), СВ - механическая система с одной степенью свободы, которая может совершать колебания вдоль направления СВ,( ). Силы, действующие на частицу массы fM , находящуюся на Земле и неподвижную относительно Земли, показаны на фиг, 3. Здесь приняты обозначения: Р - сила земного притяжения, N - сила реакции опо ры, Щ - масса тела, - центростремительное ускорение, с которым движется те О .niLl. 2 )Rstfi/© PvK-RT где V - гравитационная постоянная, м - масса Земли, л - угловая скорость вращения Зем ли. На фиг. 4 изображена механическая колебательная система о крутильным маят НИКОМ, с помощью которой ; реализуется ( способ. Обозначения следующие: основания маятника 1, упругая нить 2, рама 3, грузы 4,5. По второму закону Ньютона в неинер- циальной декартовой системе координат, связанной с неподвижным наблюдателем на Земле, уравнение движения покоящегося относительно Земли тела запищется так: J2...1 - . т рЧкЧг -О p()(o. Г(г ( sine COS &, f5(,N) ; где Pj N, F, - проекций сил земного притяжения Р , peaKi H опоры и не, инерциальной силы F соответственно на: {направления Х (фиг. 1) (фиг. З) Х- направления вдоль широты; Х направления вдоль долготы; X - направ j ние вдоль радиуса , проведенного из цент ра Земли в место положения; V - гравитационная постоянная; М - масса Зем - радиус Земли; (О - угловая скорост вращения Земли; Q - широта места . ложения - угол между осью вращения и радиусом, проведенным из центра Земли в место положения; ТП - масса механич кой системы.. Гравитационное поле Земли считают | сферическим. Затем переходят к сферичес- кой системе координат {у,У)У ) (t Д , j5 ), связанной с декартовой прямоугольной системой (Х, X , X ) преобразованием (фиг, 2): Х fCOSfi sin О Х -rsi.np sin Cf ; x. rcosa . в этой системе координат уравнение (1) запишется -в виде: т 0 F - составляющие векторов по координате у «i N и Г Связь между составляющими любого вектора Р в системе (Х Х х ) .и (У ) определяется по формуле. jk V Мехдн гческая система с одной степенью свободы вдоль У- без затухания, выведенная из положения равновесия, будет совершать свободныеколебания, уравнение для которых получится варьированием уравнения (3) Д i.()y 0 смещение вдоль направления )ициент упругости мехвн ческой системы. Так как благодаря выбранной системе координат механическая система обладает одной .степенью свободы вдоль Р , то возможно смещение В только вдоль СВ и сила реакции будет меняться только в этом направлении (фиг. 2,4) пропорционально смещению системы относительно положения равновесия. После подстановки в уравнение (4) всех величин и деления обеих частей уравнения на массу /TJ это уравнение примет вид: й,/ -Яйу coj-cos c ( 2 )Jtj-uj sincfsLn islncisln cosae - coscrsinz©) /r „ где CO собственная частота колебаний; SI -частота свободных колебаний, которая измеряется непосредственно. Далее механическую систему с одной степенью свободы располагают в плоскос-щ, перпендикулярной к радиусу Земли, выводят из состояния равновесия, и система нач№нает совершать колебания с частотой Si . (угол а 0).: 52., coj-(OgSm coS29 Ш После этого механическую систему повора- чивают на 90° из относительно первоначал ного положения. Частота колебаний станет равной 51,,. ,ч2 2 г 2 2 )COSJJCOS20 .(Л Из уравнений (6) и (7) .непосредственно определяется широта местонахождения , g -Slf-Sl X 0 yarccos При установке механической колебательной системы в первом случае вдоль линии широты, а во втором - вдоль линии долготу получают более простой случай. Q -lo ccos- - Г ; UСО Небольшие отклонения от горизонтальной плоскости, которая иэ-за вращения Земли не совпадает с плоскостью, перпендикуляр - ной к радиусу, являются несущественными. Примером системы является маятник, изображенный на фиг. 4, который представ ляет собой жесткую рамку 3 в виде перевернутой буквы Т, с грузами 4,5 на концах, свободно подвешенную на упругой нит 2. . Маятник может совершать крутильные колебания с малой амплитудой в горизонтальной плоскости. Вначале маятник устанавливают в произвольном направлении, приводят в колеб тельное движение вокруг оси ударом по одному из шариков или каким-либо другим способом и измеряют частоту колебаний JL . После этого маятник поворачивают на девяносто градусов относительно первоначального положения коромысла (4,5) и | снова измеряют частоту колебаний 5,-,. Для большей точности маятник можно после первого измерения остановить, установить под углом 9О к первоначальному направлению и снова привести в колебательное движепие. По двум измеренным частотам и и известной собственной частоте колебаний СО из формулы (8) определяют широту местонахож.аения. Если же известно направление на полюс, то широту местонахождения определяют без предвари-, тельного знания собственной частоты 60. . В этом случае коромысло маятника вначале устанавливают вдоль динии долготы, поэтому направление малых колебаний будет вдоль линии широты. Затем как и в предыдущем случае маятник приводят в колебательное движение и измеряют частоту колебаний, которая согласно формуле (б) совпадает с собственной частотой jt. СОр . Далее все делают как в предыдущем случае. Широта местонахождения определится по формуле (9). Предмет изобретения I Способ определения широты местонахож- дения, заключающийся в установке произвольным образом на поверхности Земли механической колебательной системы с одной степенью свободы, сообщении ей колебательного движения, измерении частоты колебаний и вычислении по результатам измерения широты местонахождения, отличаюшийся тем, что, с целью повышения точности, механическую колебательную систему разворачивают относительно .начального положения на 90 , и повто{ но измеряют частоту колебаний. Фиг.2 /Z ////y// Фие.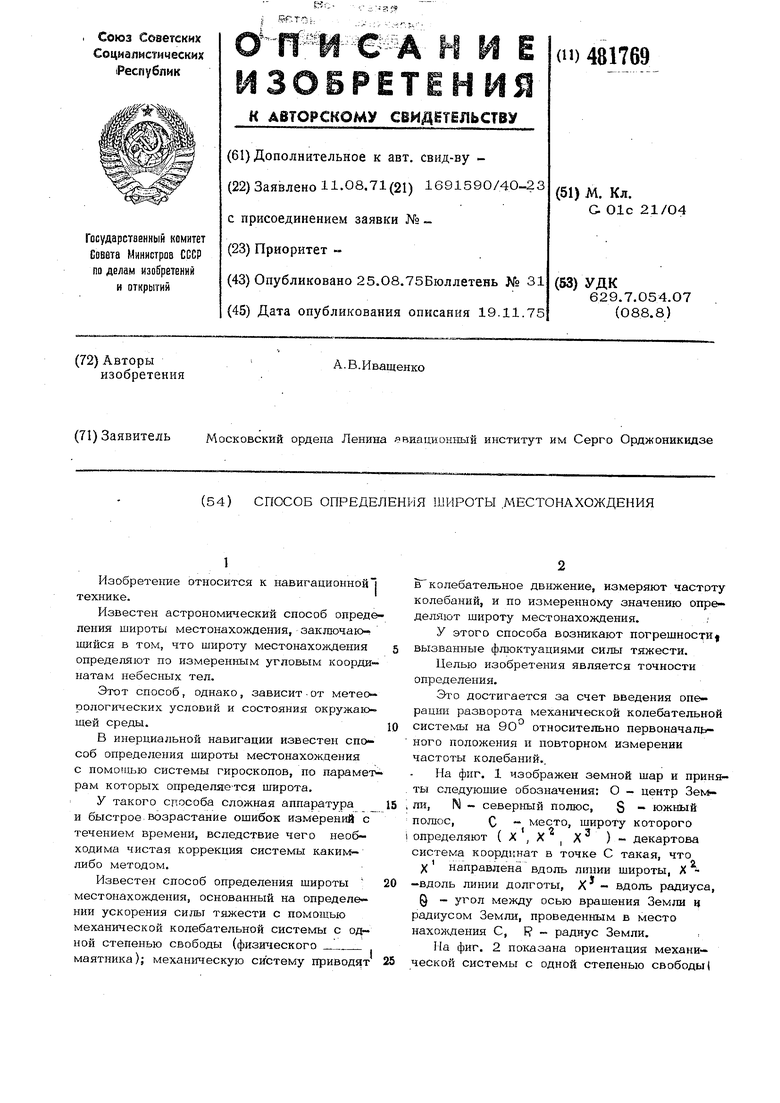
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОЛЬЗОВАТЕЛЬСКОГО ТЕРМИНАЛА С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ | 2015 |
|
RU2605457C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2696086C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| Способ определения географических координат подводного объекта | 2018 |
|
RU2713814C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ РАМОЧНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741074C1 |
| СПОСОБ И СИСТЕМА КОСМИЧЕСКОЙ НАВИГАЦИИ | 2014 |
|
RU2568937C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННОЙ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741068C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2017 |
|
RU2652603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ СПУТНИКА-РЕТРАНСЛЯТОРА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2679890C1 |