1
Изобретение относится к области управления экскаваторными электроприводами постоянного тока и может найти применение для управления поворотными движениями экскаваторов типов драглайн и прямая лопата.
Известно устройство для управления электроприводом постоянного тока механизмов экскаватора 1.
Это устройство выполнено для САР с параллельной коррекцией и содержит регулируемые преобразователи в цепи якоря и в цепи возбуждения электродвигателя, цепь обратной связи по току якоря с регулируемым в функции тока возбуждения ограничением, датчики тока якоря напряжения и тока возбуждения. Датчик тока якоря через функциональный преобразователь подключен к одному из входов регулируемого преобразователя в цепи возбуждения, к другим входам которого подключены через нелинейный элемент датчик напряжения на якоре электродвигателя и выход логического элемента И, входы которого соединены с датчиком напряжения на якоре электродвигателя и дополнительным датчиком тока якоря электродвигателя. Устройство обеспечивает повышение использования динамических свойств электродвигателя и снижение ударов в передачах при трогании
с места, а также при переходе в тормозной режим.
Недостатком этого устройства является относительное увеличение ударов в передачах при резком реверсе сигнала задающего устройства, а также отсутствие защиты от перегрева электродвигателя и от исчезновения напряжения переменного тока, питающего датчик тока якоря.
Наиболее близким техническим решением является устройство для управления электроприводом поворота одноковшового экскаватора, содержащее систему генератор-двигатель с регулируемыми возбудителями двигателя и генератора, соединенные соответственно с выходами регуляторов тока возбуждения и тока якоря, вход которого соединен через блок ограничения с датчиком тока якоря, задающее устройство,
подключенное одним из выходов к задающему входу регулятора напряжения, датчик тока возбуждения, соединенный с блоками нелинейности 2. В качестве датчика тока используется
падение напряжения на добавочных полюсах. Этому устройству свойственны следующие недостатки: при резком реверсе задающего сигнала величина тока реверса больше тока трогания, что создает дополнительную нагрузку на механизм; схемой
не предусмотрена защита электродвигателя и генератора от перегрева при чрезмерно интенсивной ра-боте или отказе вентилятора, от отказа датчика тока и исчезновения напряжения питания датчика тока; применение в качестве датчика тока падения на добавочных полюсах обуславливает температурную нестабильность токов разгона и торможения.
Целью изобретения является повышение надежности электромеханической системы.
Это достигается тем, что устройство снабжено реверсивным блоком, датчиком модуля напряжения, регулятором налряжения сравнения, схемой сравнения, вторым блоком нелинейности, двумя стабилитронами, мостовыми схемами и блоком переключения, причем реверсивный выход задающего устройства подключен к управляющему входу реверсионного блока, включенного между входом регулятора тока якоря и выходом регулятора напряжения, ко входам которого подключен датчик модуля напряжения, подключенный в отрицательную обратную связь регулятора напряжения и соединенный со входом регулятора напряжения сравнения и через стабилитрон - с одним из входов регулятора тока возбуждения, два других входа которого через блоки нелинейности подключены соответственно к датчиКу тока якоря и второму входу регулятора напряжения сравнения, выход которого подключен к соединенной с датчиком тока якоря схеме сравнения, выход которого через блок переключения подключен к регулятору тока якоря, при этом второй вход регулятора напряжения через стабилитрон соединен с выходом постоянного тока одной из диодных мостовых схем, соединенной своими выводами переменного тока с отрицательными выводами постоянного тока выхода датчика тока якоря и выхода постоянного тока второй диодной мостовой схемы, положительные выводы которых соединены между собой, а входы переменного тока второй диодной мостовой схемы и управляющий вход блока переключения включены параллельно цепи добавочных полюсов системы генератордвигатель.
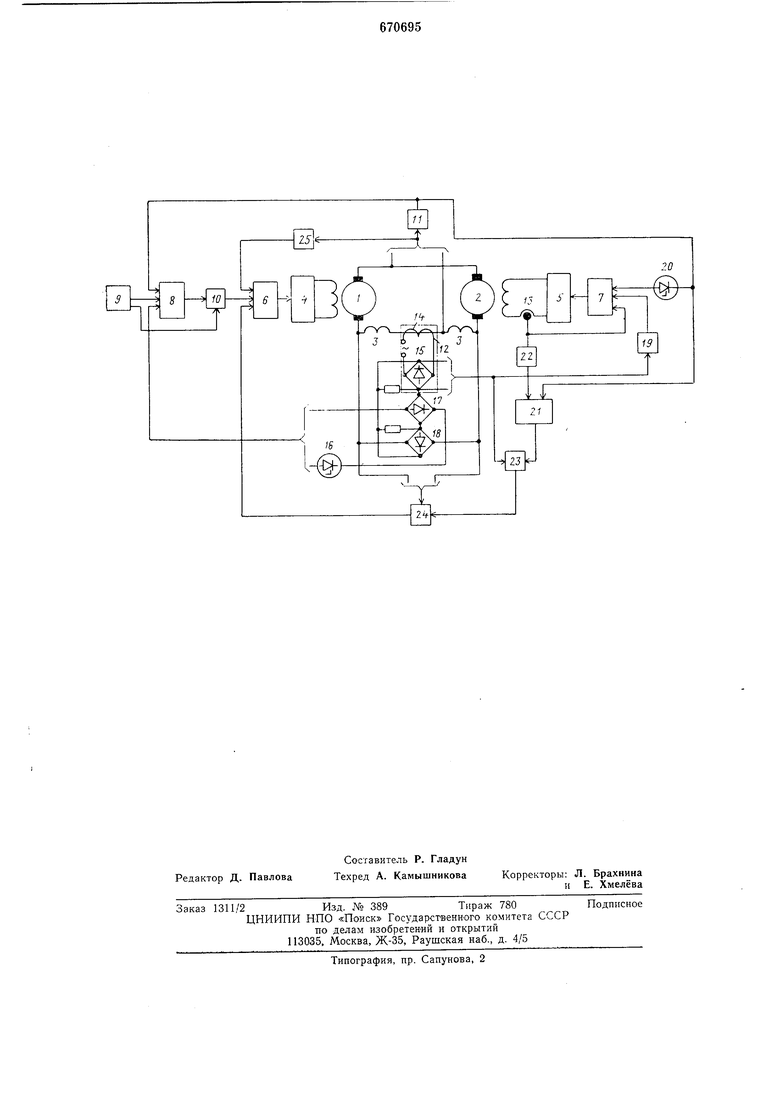
На чертеже представлена блок-схема устройства.
Электропривод поворота одноковшового экскаватора содержит генератор I, двигатель 2, цепь 3 добавочных полюсов, возбудитель 4 генератора, возбудитель 5 двигателя, регулятор 6 тока якоря, регулятор 7 тока возбуждения, регулятор 8 напряжения, задающее устройство 9, реверсирующий блок 10, датчик 11 модуля напряжения, датчик 12 тока якоря, датчик 13 тока возбуждения. Датчик 12 тока якоря включает, например, трансформатор 14 тока и подключенный к нему входами переменного тока диодный мост 15, выходы постоянного тОКа которого являются выходом датчика, 12 тока якоря. Реверсирующий блок 10 подключен своим входом к выходу блока 8 регулятора напряжения и выходом к задающему входу регулятора 6 тока, управляющий вход реверсирующего блока 10 соединен с реверсирующим выходом задающего устройства 9, другой выход которого подсоединен к задающему входу регулятора 8 напряжения. К другому входу регулятора 8 напряжения через стабилитрон 16 подключен выход постоянного тока диодной схемы 17, соединенной своими входами переменного тока с отрицательными выводами выхода датчика 12 тока якоря и выхода постоянного тока диодной мостовой схемы 18, положительные выводы которых соединены между собой. Входы переменного тока схемы 18 присоединены параллельно цепи 3 добавочных полюсов системы генератор - двигатель.
Выходы датчика 12 тока якоря соединены через блок 19 нелинейности с задающим входом регулятора 7 тока возбужде ния двигателя. К другому входу регулятора 7 через стабилитрон 20 подсоединен выход датчика 11 модуля напряжения двигателя, подключенного также к одному из входов регулятора 21 напряжения сравнения и регулятора 8 напряжения якоря.
Второй вход регулятора 21 соединен через блок 22 нелинейности с датчиком 13 тока возбуждения двигателя 2. Выход регулятора 21 подсоединен к одному из входов схемы 23 сравнения, ко второму входу которой подключен выход датчика 12 тока якоря. Выход схемы 23 сравнения через блок 24 переключения соединен с третьим из входов регулятора 6 тока якоря. Один из входов переключающего блока 24 подсоединен параллельно цени 3 добавочных полюсов, а второй-« выходу схемы сравнения 23.
Напряжение на якоре двигателя 2 через блок 25 ограничения заведено на один из входов регулятора б тока якоря.
Электропривод работает следующим образом.
Задающее устройство 9 выдает два сигнала. Один из них, поступающий на задающий вход регулятора 8 напряжения якоря, задает частоту вращения привода, а другой, поступающий на вход реверсирующего блока 10, задает направление вращения.
Регулятор 8 напряжения вырабатывает сигнал, который через реверсирующий блок 10 поступает на задающий вход регулятора 6 тока якоря. Выходной сигнал регулятора 6 поступает на вход возбудителя 4 генератора, который питает обмотку возбуждения.
Возбудившись, генератор 1 подает напряжение на якорь двигателя 2 через цепь 3 добавочных полюсов и датчик 12 тока якоря. Начинается вращение двигателя, но
с пониженным моментом, так как начальный ток возбуждения двигателя для этой цели установлен ниже номинального постоянным заданием регулятора 7 тока возбуждения двигателя.
Вращение двигателя с пониженным моментом и практически вхолостую происходит до тех пор, пока не выберутся все зазоры в механических передачах между двигателем и исполнительным механизмом. После выбора зазоров ток якоря увеличивается, и увеличившееся выходное напряжение датчика 12 тока якоря через блок 19 нелинейности поступает в качестве положительной задающей связи на вход регулятора 7 тока возбуждения двигателя. Увеличившийся выходной сигнал регулятора 7 поступает на вход возбудителя 5 двигателя и вызывает увеличение тока возбуждения, магнитного потока и, следовательно, вращающего момента двигателя.
Когда ток якоря станет больще уставки токоограничения, т. е. когда выходное напряжение датчика 12 тока якоря, поступающее на один из входов схемы 23 сравнения, станет больше, чем выходное напряжение регулятора 21 напряжения сравнения (уставки токоограничення), поступающего на другой вход схемы 23 сравнения, последняя выдает сигнал, который, пройдя через блок 24 переключения, попадает на вход регулятора 6 тока якоря.
Блок 24 переключения меняет полярность выходного сигнала в зависимости от полярности падения напряжения на цепи 3 добавочных полюсов, т. е. в зависимости от направления тока якоря так, чтобы в режиме разгона эта связь по току якоря была отрицательной. ТакиМ образом, ток якоря ограничивается при разгоне до допустимой в-еличины.
Задающим сигналом для регулятора 21 напряжения сравнения является выходное напряжение датчика 13 тока возбуждения двигателя, прощедщее через 22 нелинейности, формирующий характеристику намагничивания двигателя. Отрицательным сигналом для регулятора 21 является напряжение, снимаемое с выхода датчика 11 модуля напряжения двигателя, так как согласно законам коммутации, при меньших напряжениях якоря можно допустить ббльшие токи. По мере разгона привода ток якоря спада ет, уменьшая через положительную обратную связь ток возбуждения двигателя, т. е. дополнительно увеличивая скорость двигателя.
Отрицательная обратная связь по напряжению, приходящая на вход регулятора 8 напряжения якоря через датчик 11 модуля напряжения, служит для жесткого поддержания напряжения якоря, несмотря на влияние возмущающих воздействий (изменения напряжения питающей сети, изменения температуры машин, скорости и т. д.)
и для повыщения быстродействия контура. С той же целью охвачен отрицательной обратной связью по току возбуждения двигателя регулятор 7 тока возбуждения двигателя.
При исчезновении выходных сигналов задающего устройства 9, т. е. при поступлении команды на остановку, если исчезает возбуждение генератора, то происходит резкое торможение с ударом в механической передаче, так как это равносильно закорачиванию якоря вращающегося двигателя. Против этого принят ряд мер.
Снижение напряжения генератора 1 до величины, меньщей, чем против ЭДС двигателя 2, вызывает изменение направления тока якоря, что, в свою очередь, изменяет полярность падения напряжения на цепи о добавочных полюсов. Это изменение полярности добавочных полюсов переключает полярность выходного сигнала блока 24 переключения, изменяя ЗНак обратной связи по току якоря. Теперь увеличение тормозного тока вызовет увеличение выходного сигнала регулятора 6 тока возбуждения генератора и напряжения якоря, что снижает разность между ЭДС двигателя н генератора. Таким образом, торможение пройдет плавно с желаемым тормозным током и моментом. Одновременно увеличение тока якоря через положительную связь (датчик 12, блок 19 нелинейности и регулятор 7) вызывает увеличение тока возбуждения двигателя, что может привести к увеличению ЭДС двигателя. При увеличении ЭДС двигателя выше порога начала пропускания тока стабилитроном 20 появляется отрицательный сигнал на в.ходе регулятора 7, что снижает магнитный поток и ЭДС двигателя. Это также способствует увеличению плавности торможения и защищает от пробоя Коллектор двигателя.
После окончания процесса торможения на якоре генератора 1 остается небольшое напряжение, вызываемое остаточным магнитным потоком главных полюсов. Это остаточное напряжение вызывает ползучую скорость привода, что нежелательно. Для исключения этого эффекта в регулятор б введена отрицательная связь по напряжению через блок 25 ограничения. При отсутствии задающего сигнала она вызывает на выходе регулятора 6 сигнал такого знака, что ток возбуждения генератора вызывает магнитный поток, направленный встречно по отношению к остаточному магнитному потоку и компенсирует его. Таким образом, напряжение якоря генератора 1 становится равным нулю при стоянке привода.
Схемой управления предусмотрен ряд защит от неисправностей. При исчезновении выходного напряжения датчика 12 тока якоря (исчезновение питания, обрыв провода и др.) мог бы начаться бесконтрольный рост тока якоря, что опасно.
7
Однако при этом нарушается равенство напряжения включенных встречно моста 15 датчика 12 тока якоря и моста 17 падения напряжения на добавочных полюсах. Разность их Напряжений вызовет напряжение на выходе моста 17, которое (если оно выше порога стабилитрона 16) попадает в качестве сильного отрицательного сигнала на вход регулятора 8, компенсируя задающий сигнал, т. е. сигнал с выхода задающего устройства 9, и останавливая привод. Эта связь действует (но в меньшей мере) и при перегреве элементов 1 и 2, так как увеличение сопротивления цепи 3 добавочных полюсов вызывает увеличение на ней падения напряжения, т. е. появление сигнала с выхода моста 17, ослабляющего интенсивность работы привода. То же происходит при недопустимо больших скоростях изменения тока якоря, так как добавочные полюса обладают индуктивностью и падение напряжения на них зависит не только от величины тока, но и от скорости ее изменения. Большие скорости изменения тока могли бы привести вследствие иядукгивности якоря к перенапряжению и пробою коллектора.
Схема осуществляет и защиту привода от исчезновения тока возбуждения двигателя. Исчезновение тока возбуждения двигателя вызывает исчезновение напряжения на выходе датчика 13, блока 22 нелинейности и выходного напряжения регулятора 21 напряжения сравнения, т. е. уставка ограничения тока якоря станет равной нулю. Это значит, что регулятор тока якоря не допустит появления тока в якорной цепи, т. е. это приведет к остановке привода.
Устройство позволяет повысить надежность электромеханической системы новорота одноковшового экскаватора за счет снижения ударных нагрузок при резком реверсе, разгоне и торможении и исключает аварийные режимы при чрезмерных перегревах и недопустимых скоростях нарастэния тока ЯКоря, а также при обрыве цепи или исчезновении питания датчика тока якоря.
Формула изобретения
Устройство для управления электроприводом поворота одноковшового экскаватора, содержащее систему генератор-двигатель с регулируемыми возбудителями двигателя и генератора, соединенными соот8
ветственно с выходами регуляторов тока возбуждения и тока якоря, вход которого соединен через блок ограничения с датчиком тока якоря, задающее устройство, подключенное одним из выходов к задающему входу регулятора напряжения, датчик тока возбуждения, соединенный с блоками нелинейности, отличающееся тем, что, с целью повыщения надежности электромеханической системы, оно снабжено реверсивным блоком, датчиком модуля напряжения, регуляторам напряжения сравнения, схемой сравнения, вторым блоком нелинейности, двумя стабилитронами, мостовыми схемами и блоком переключения, причем реверсивный выход задающего устройства подключен к управляющему входу реверсионного блока, включенного между входом регулятора якоря и выходом регулятора напряжения, ко входам которого подключен датчик модуля напряжения, подключенный в отрицательную обратную связь регулятора напряжения и соединенный со входом регулятора напряжения сравнения и через стабилитрон - с одним из входов регулятора тока возбуждения, два других входа которого через блоки нелинейности подключены соответственно к датчику тока якоря и второму входу регулятора напряжения сравнения, выход которого подключен к соединенной с датчиком тока якоря схеме сравнения, выход которой через блок переключения подключен к регулятору тока якоря, при этом второй вход регулятора напряжения через стабилитрон соединен. с выходом постоянного тока одной из диодных мостовых схем, соединенной своими выводами переменного тока с отрицательными выводами постоянного тока выхода датчика тока якоря и выхода постоянного тока второй диодной мостовой схемы, положительные выводы которых соединены между собой, а входы переменного тока второй диодной мостовой схемы и управляющий вход блока переключения включены параллельно цепи добавочных полюсов системы генератор-двигатель.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 482854, кл. Н 02Р 5/06, 1971.
2.Буль В. Я. и др. Наладка электроприводов экскаваторов, М., «Недра, 1975, с. 169-171.
19
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
| Устройство для управления электроприводом постоянного тока механизмов экскаватора | 1974 |
|
SU663794A2 |
| Устройство для двухзонного регулирования скорости | 1978 |
|
SU769694A2 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1977 |
|
SU705632A1 |
| Способ управления электроприводом постоянного тока и устройство для его осуществления | 1978 |
|
SU771835A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1979 |
|
SU855910A1 |
| Электропривод постоянного тока | 1977 |
|
SU729800A1 |
| Способ управления электроприводом постоянного тока и устройство для его реализации | 1977 |
|
SU653708A1 |
| Способ управления электроприводом постоянного тока и устройство для управления электроприводом постоянного тока | 1979 |
|
SU860249A2 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |