1
Устройство отиооится « системам автоматического коитроля и регулироваиня И предназначено для контроля ведич.ины перемещения Исполнительных ьмеханизмо.в s числовых системах .Програм м.ного управления CTa-HiKciB и других маши н.
Известны многоразряд ные датчики углового положения вала, содержащие измерительные кодювые барабаны, соедийеяные -между собой через зубчатые передачо, и считьивающие элементы.
Недостат1ка1Ми таких устройств с «од-овыми бар-абапами является иедостаточ.цая надежность и точность ра-бюты ори .непрерЫ В1НОм сч1иты1ва-нии во время Контролируемого перемещения, наличие большого количества длиНйых соединительных линий связи .между датчиком и усгрой1ств(ом евода размерной информации, а также необходимость наличия сравнивающего устройства для оолучения управляющего сигнала на исполнительный орган.
Целью изобретения является повышение точиости работы и быстродействия устройства.
Эта цель достигается тем, что в каждом измерительном барабане установлены струйные печатные илаты, снабже1н«ые входными, управляющими, выходными каналами и промежутючными камерами, причем в каждой
плате В1ходиые .каналы сообщены с промежуточ.ной камерой и соединены с вы.ходным каналом, связанным с управляющи1М KaHavioM. Применение предложенного изобретения в числовых системах программного управления, особенно в пневматических, нозволит исключить такие узлы как сравнивающею }стройст1ва ) дешифратор, в результате чего злачителыно упрощается система в целоМ, повышается надежность работы систем, их точность и быстродейспвие.
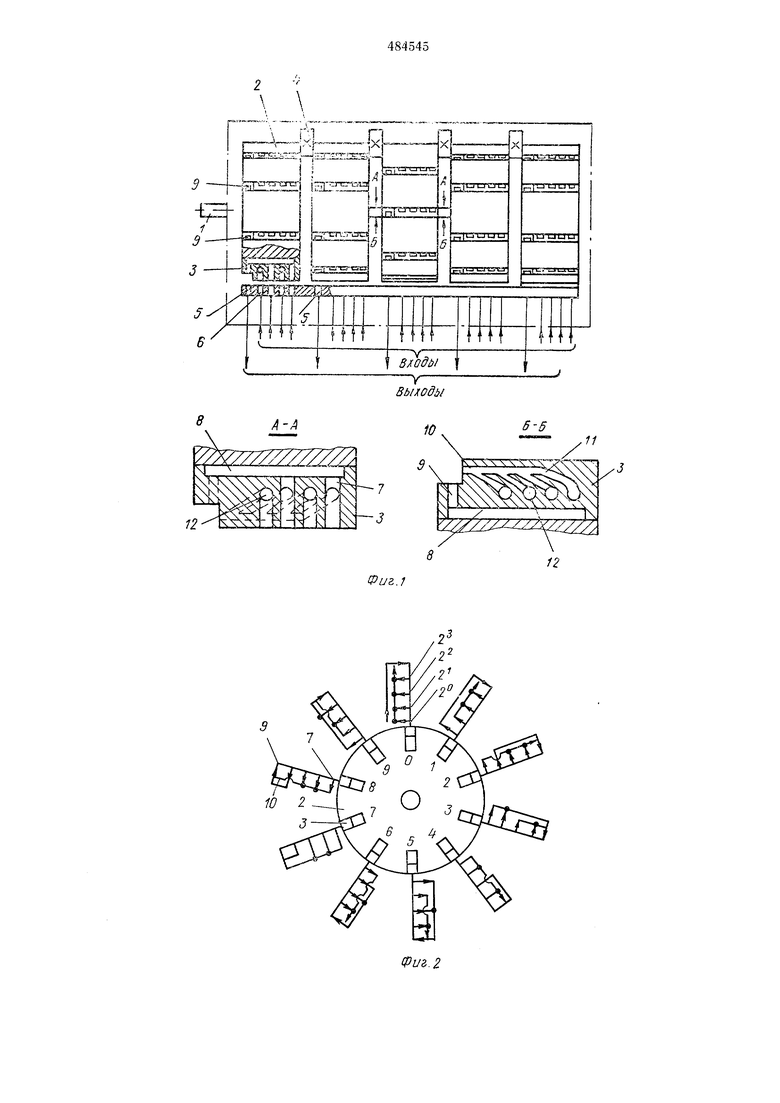
На фиг. 1 .показам многоразрядлый датчик углового положения вала; на фиг. 2 - измерительный барабан и еоответспвлющие каждой его измерительной позицин логичеовие схемы соедине П1Я, выполненные в виде струйных плат. Л1|Ногора.зрЯ1Д1вый датчик углового положения вала содержит приводной вал 1, измерительные барабаны 2 со струйными платами 3, равномерно расположенными по окружности барабанов в их радиальных пазах, число оборотов которых равно числу кхзптролируемых положений в данном разряде, и зубчатые передачи 4 с нередаточ1ным отношением 1 : 10.
Против каждого измерительного барабана 2 установлена группа эле1ментс в, состоящая
из одного считывающего элемента, выполненHOfo в Виде канала 5, и четырех задающих элементов, выполненных в виде сопл 6.
На одной поверхиости платы выиолиены входные каналы 7, в онределевной последовательности соединенные через проимежуточную KaiMepy 8 с выходным каналом 9, а на другой поверхности платы выполнены выходной канал 9, управляющий канал 10 и каналы 11, соединяющие через отверстия 12 управляющий канал 10 со входными каналами 7. Каждой лозидии измерительного барабана 2 соответствует определенная логическая схема соединения входных каналов 7 с выходным каналом 9, выр ажающая данную позицию барабана в двоично-десятичном или другом коде.
Многоразрядный датчи(к у глового положения вала работает следующим образом.
На входы задающих элементов 6 подается задание о величине перемещения в виде коМбинаадии лневмат-ичеоких единичных и нулевых сИГналое. П1ри(вод|ной вал 1 получает вращение от исполнительного органа (на фигурах не показан) и приводит в движение измерительные барабаны датчика. Первый барабан датчика, связанный непосредственно с приводным валом 1, считает десятые доли оборота приводного вала, второй барабан, соединенный с первым передачей 4, считает целые обороты вала 1, третий - десятки оборотов, четвертый - сотни и т. д.
П|ри вращении иЗимерительного барабана 2 с выходов задающих элементов 6 поступают в каналы 7 сигналы и при совпадении номера измерит ел Ь1ной позиции с числом, заданным комбинацией задающих сигналов, на выходе канала 5 данного разряда появляется выходной сишнал.
Рассмотрим, например, пятую измерительную позицию бара:бана 2, которая выражается в д воично-десятичном коде чИ1слом 0101. Единичные сигналы, поступающие с элемеитов 6 ко второму и четвертому каналам 7 через камеру 8 приходят к выходному каналу 9, а (первый и третий каналы 7 посредством отверстий 12, каналов 11 соединены с управляющим каналом 10, предназначенным для предотвращения ложного срабатывания. TaiK, если по каналам 7 поступает комбинация сигналов OilM, выражающая в двоичнодесяшч ном коде ЧИсло 7, то при прохол деНИ1И пятой позиции барабана единичный сигнал, поступающий по третьему каналу 7, явля-етея избыточным для числа 5 и, проходя далее в управляющий канал II через соответствующее отверстие 12, запрещает появление выходного сигнала канала 9. Если же к каналам 7 поступает комбииация сИГналов
OOOl, то при считывании пятой позиции барабана единичный сигнал, поступающий в камеру 8 по четвертОМ|у каналу 7, через второй канал 7 рыйд,ет в атмосферу. И только в том случае, когда по каналам
7 поступает комбинация сигналов 010-1, соответствующая пятой позиции барабана, появляется сигнал в канале 9, который через канал 5 поступает на выход данного разряда датчика. Анало-гично производится сравнение
заданной комбинации входных сигналов с номером позиции на всех измерительных позициях барабана и только при их совпадении на выходе данного разряда появляется выходной сигнал.
Выходы с каждого разряда датчика могу: быть объединены схемой совпадения в один выход к исполнительному органу и могут использоваться каждый в отдельности для получения сигналов на замедление скорости
движения и/ополнителыного органа, на индикацию и т. д.
П р е д М е т изобретения
Многоразрядный датчик углового положения вала, содержащий измерительные барабаны, соединенные между собой через зубчатые передачи, и считывающие элементы, отличающийся тем, что, с целью повышения точности работы и быстродействия устройства, в каждом измерительном барабане установлены струйные печатные платы,
снабженные входными, управляющими, выходными каналами и промежуточными камерами, причем в каждой плате входные каналы сообщены с промежуточной камерой И соединены с выходным каналом, связанным с управляющим каналом.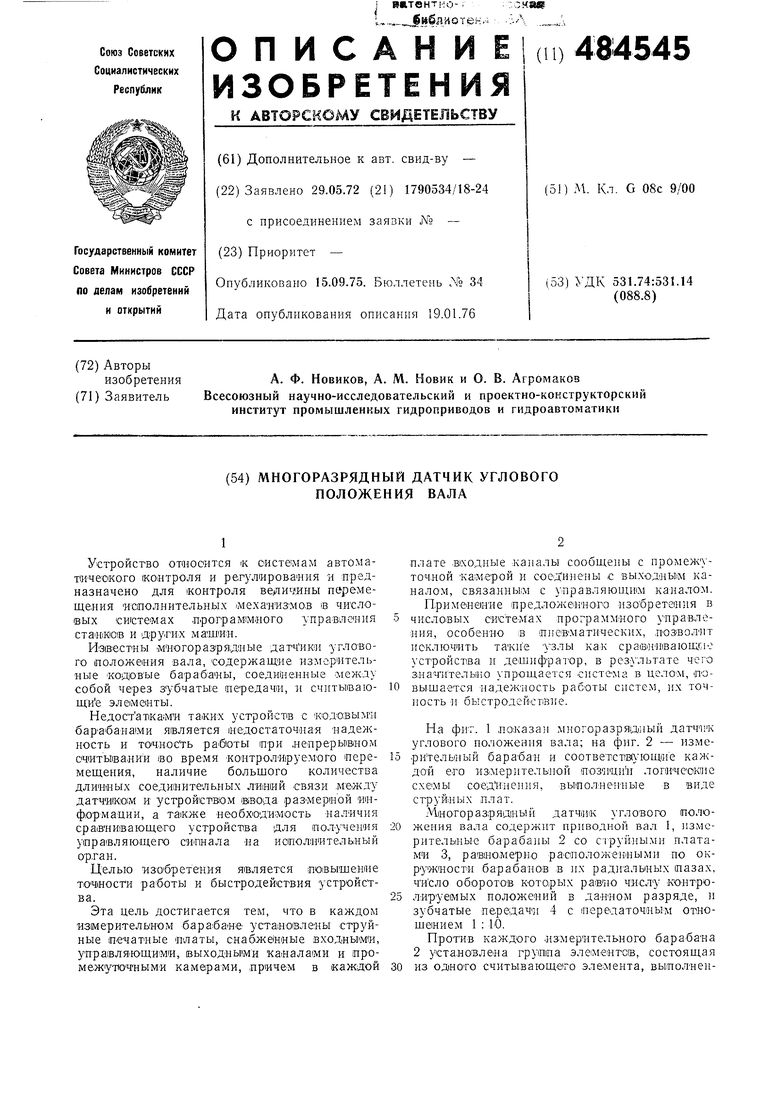
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный переключатель | 1986 |
|
SU1398088A1 |
| Устройство для контроля и сортировки деталей | 1987 |
|
SU1443977A1 |
| Струйный преобразователь угла поворота в @ -разрядный код | 1983 |
|
SU1193313A1 |
| Цифро-аналоговая система программногоупРАВлЕНия | 1977 |
|
SU819793A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И МНОГОДИАПАЗОННОЙ СОРТИРОВКИ ПЛОСКИХ ДЕТАЛЕЙ | 1992 |
|
RU2077962C1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство управления манипулятором | 1984 |
|
SU1168898A1 |
| Устройство для определения направления и скорости вращения вала | 2024 |
|
RU2832123C1 |
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ПЛОСКИХ ДЕТАЛЕЙ | 1992 |
|
RU2060841C1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |