чем первый и второй измерительные выходы пневматического датчика соединены соответственно с первым и вторым входами пневмоэлектрического преобразователя, с первым выходом пневмоэлектрического преобразователя соединены входы первого, третьего и четвертого пороговых элементов, с вторым выходом пневмоэлектрического преобразователя - входы второго, пятого и шестого пороговых элементов, выходы пороговых элементов соединены: первого - с входами первого, четвертого, шестого инверторов и первыми входами десятого и четырнадцатого элементов И, третьего и четвертого- соответственно с первым и вторым разрядами входного регистра блока хранения и реализации программ, второго - с входами третьего, второго, пятого инверторов и первыми входами девятого и пятнадцатого элементов И, пятого и шестого - соответственно с третьим и четвертым разрядами входного регист ра блока хранения и реализации программ, выход инверторов соединены: первого - с первым входом восьмого элемента И, четвертого - с вторым входом девятого элемента И, шестого - с первым входом шестнадцатого элемента И, третьего - с вторым входом восьмого элемента И, второго - с первым входом тринадцатого элемента И, пятого- с вторым входом десятого элемента И, выходы элементов И соединены: десятого - с первым входом двенадцатого элемента И, четырнадцатого - с первым входом четвертого элемента ИЛИ и входом второго повторителя, девятого - с первым . входом одиннадцатого элемента И, пятнадцатого - с первым входом шестого элемента ИЛИ и входом четвертого повторителя, восьмого -
с S-входом первого триггера, шестнадцатого - с входом шестого повторителя и вторым входом шестого элемента ИЛИ, тринадцатого - с вторым входом четвертого элемента ИЛИ и входом первого повторителя, одиннадцатого - с S-входом второго триггера, двенадцатого - с S-входом третьего триггера, / -вход первого триггера соединен с кнопкой «Сброс, / -входы второго и третьего триггеров соединены соответственно с выходами пятого и седьмого элементов ИЛИ, прямые выходы триггеров соединены: первого - с вторыми входами одиннадцатого и двенадцатого элементов И, второго - с вторыми входами тринадцатого и четырнадцатого элементов И и входом третьего повторителя, третьего - с вторыми входами пятнадцатого и шестнадцатого элементов И и входом пятого повторителя, первые входы пятого и седьмого элементов ИЛИ соединены с ответственно с выходами четвертого и шестого элементов ИЛИ вторые входы пятого и седьмого элементов ИЛИ соединены с кнопками «Сброс, а выходы каждого из шести повторителей соединены соответственно с пятым, шестым, седьмым, восьмым, девятым и десятым разрядами входного регистра блока хранения и реализации програлм, причем исполнительный механизм дополнительно содержит двигатель с приводом движения схвата в вертикальной плоскости, связанный с выходным регистром блока хранения и реализации программ.
2. Устройство по п. 1, отличающееся тем, что узел струйных датчиков выполнен с возможностью точной настройки взаимного расположения сопл в поворотных шайбах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальная система для контроля и диагностики цифровых блоков | 1984 |
|
SU1269137A1 |
| Устройство для автоматического поиска дефектов в логических блоках | 1982 |
|
SU1108451A1 |
| Устройство для контроля монтажа | 1985 |
|
SU1280396A1 |
| Устройство для отладки и контроля микропроцессорных систем | 1988 |
|
SU1647568A1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| Устройство для тестового контроля логических узлов | 1991 |
|
SU1837297A1 |
| Устройство для отладки микроЭВМ | 1987 |
|
SU1587514A1 |
| Устройство для обмена информацией | 1984 |
|
SU1180905A1 |
| Устройство для обмена данными в многопроцессорной вычислительной системе | 1983 |
|
SU1136143A1 |
| Процессор программируемого контроллера | 1985 |
|
SU1406595A1 |
1. УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее узел струйных датчиков, блок хранения и реализации программ, состоящий из генератора тактовых импульсов, узел памяти, счетчика команд, счетчика времени, клавишного регистра, счетчика по модулю два, входного и выходного регистров, регистров адреса и кода операций, схемы сравнения, двух схем анализа состояний, пяти триггеров, трех элементов ИЛИ, семи элементов И и кнопок «Адрес, «Запись, «Сброс и «Пуск, причем выходы клавишного регистра через первый элемент И связаны с регистром числа узла памяти, а через второй элемент И - с регистром адреса, выход генератора тактовых импульсов через третий элемент И связан со счетным входом счетчика команд, а через четвертый элемент И - со счетным входом счетчика времени, каждый разряд регистра счетчика команд связан с соответствующим разрядом шины адреса узла, памяти, а через пятый элемент И - с регистром адреса, выходы узла памяти связаны соответственно с разрядами регистра кода операций, первые выходы которого связаны со схемой сравнения и с первой схемой анализа состояний, остальные выходы - с разрядами выходного регистра, выходы регистра адреса связаны с входами первого элемента ИЛИ непосредственно и через шестой элемент И, остальные входы первого элемента ИЛИ через седьмой элемент И связаны с входным регистром, выходы которого также связаны с второй схемой анализа состояний, каждый разряд регистра счетчика времени связан со схемой сравнения, выход которой связан с первым входом первого триггера, первым входом второго элемента ИЛИ и первым входом третьего элемента ИЛИ, выход первой схемы анализа состояний через линию задержки связан с вторым входом первого триггера, выход которого связан с четвертым элементом И, выход второй схемы анализа состояний связан с первым входом второго триггера, второй вход которого связан с первыми входами третьего, четвертого и пятого триггеров и с выходом третьего элемента И, выход второго триггера связан со счетчиком по модулю два, первый выход которого связан с вторым входом третьеi го триггера, а второй выход - с вторым входом четвертого триггера и входами пяСЛ того элемента И, выход третьего триггера связан с входами шестого элемента И и вторым входом третьего элемента ИЛИ, выход четвертого триггера связан с третьим входом третьего элемента ИЛИ и с входом седьмого элемента И, выходы первого элемента ИЛИ связаны со счетчиком команд, выход третьего элемента ИЛИ связан с вторым входом пятого триггера, выход которого связан с треOi тьим элементом И, кнопка «Адрес связана 00 с входом второго элемента И, кнопка «Запись - с входом первого элемента И, ас со х кнопки «Сброс - с регистром адреса, счетчиком команд, вторым входом второго элемента ИЛИ, кнопка «Пуск - с четвертым входом третьего элемента ИЛИ, и исполнительный механизм, связанный с выходным регистром блока хранения и реализации программ и содержащий два двигателя, последовательно соединенных с приводами, отличающееся тем, что, с целью повышения точности устройства, в него введены пневмоэлектрический преобразователь и блок оценки ситуации, состоящий из шести пороговых элементов, шести инверторов, шести повторителей, трех триггеров, девяти элементов И и четырех элементов ИЛИ, при
1
Изобретение относится к машиностроению, приборостроению и может быть использовано в роботозированных технологических комплексах.
Цель изобретения - повышение точности устройства.
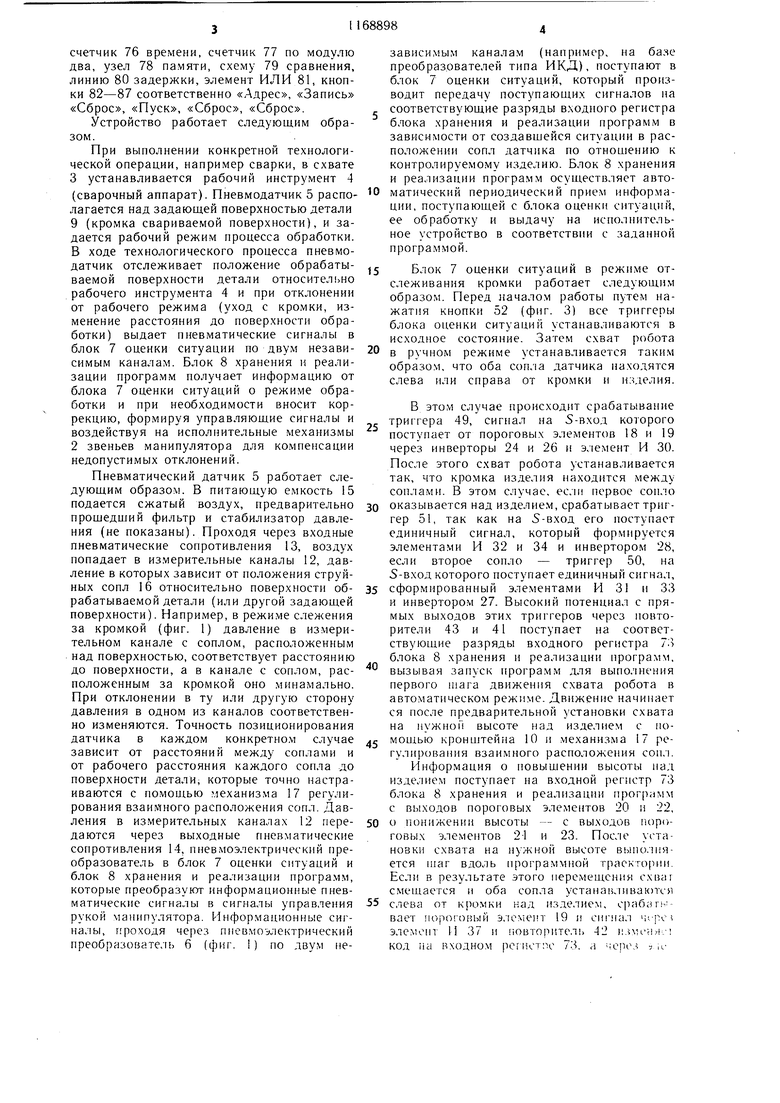
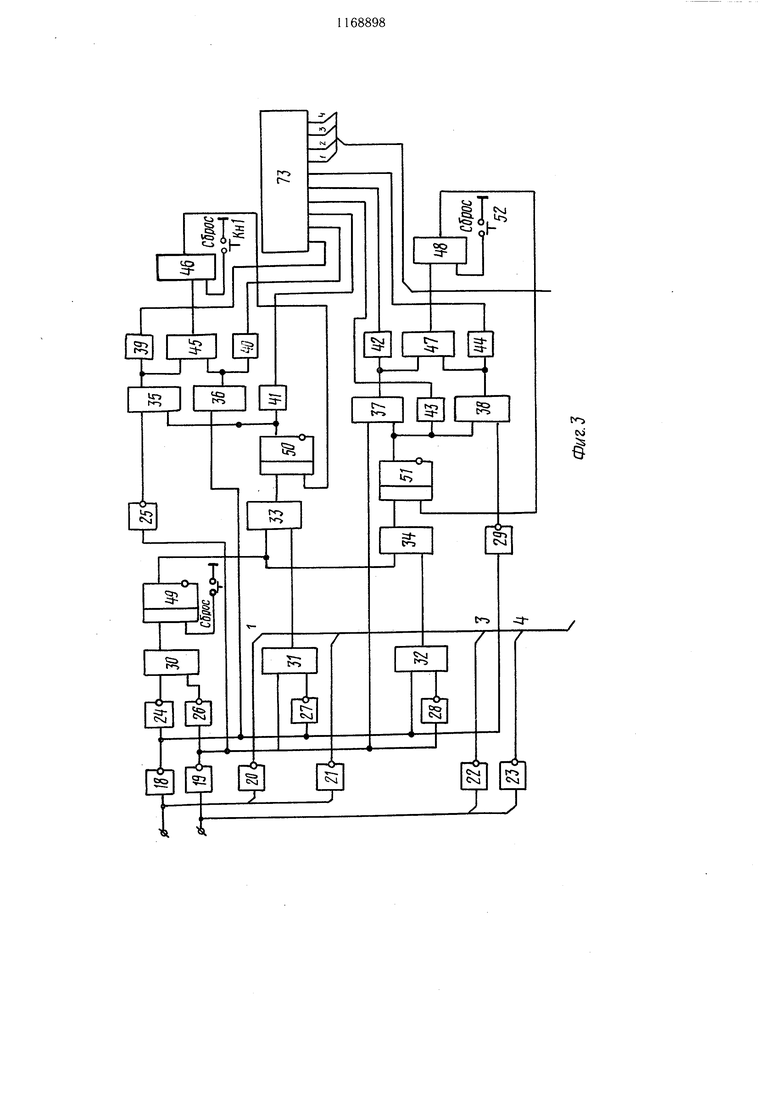
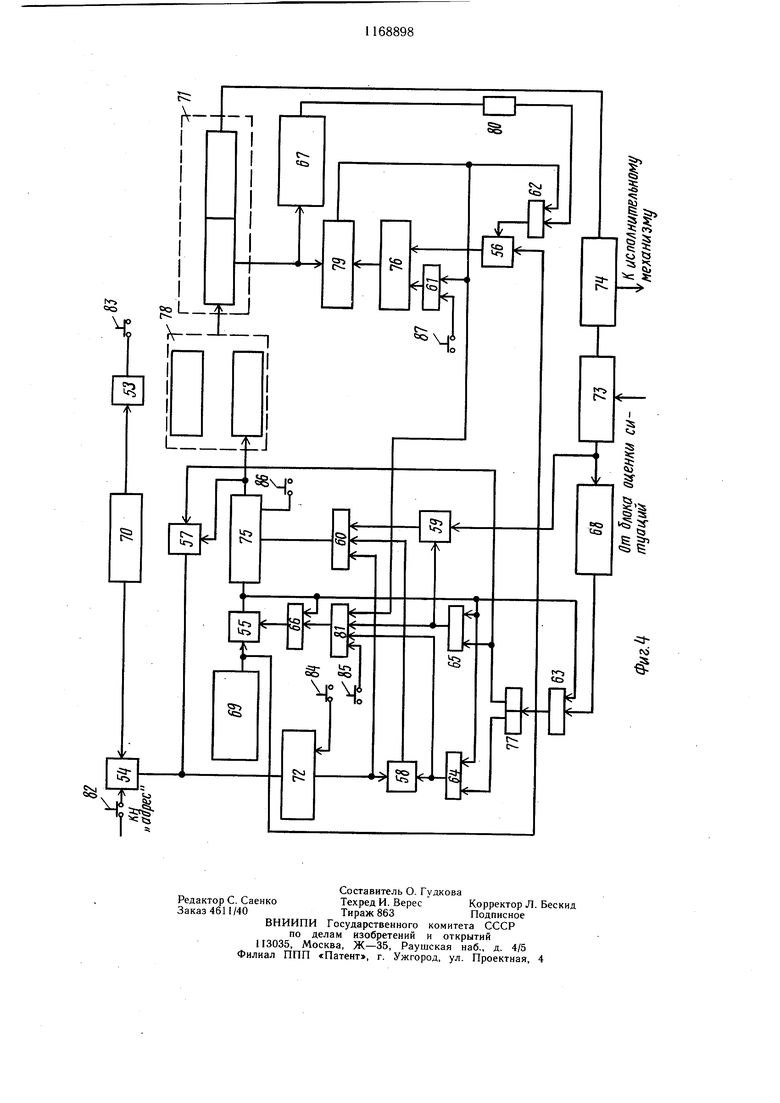
На фиг. I изображена схема предложенного устройства; на фг. 2 - конструкция пневмодатчика; на фиг. 3 - блок оценки ситуаций; на фиг. 4 - схема блока хранения и реализации программ.
Устройство управления (фиг. 1) содержит шарнирно связанные между собой звенья 1, исполнительные механизмы 2 этих звеньев, схват 3 с рабочим инструментом 4, пневмодатчик 5, пневмоэлектрический преобразователь 6, блок 7 оценки ситуаций, блок 8 хранения и реализации программ, задаюшую поверхность детали 9, кронштейн 10.
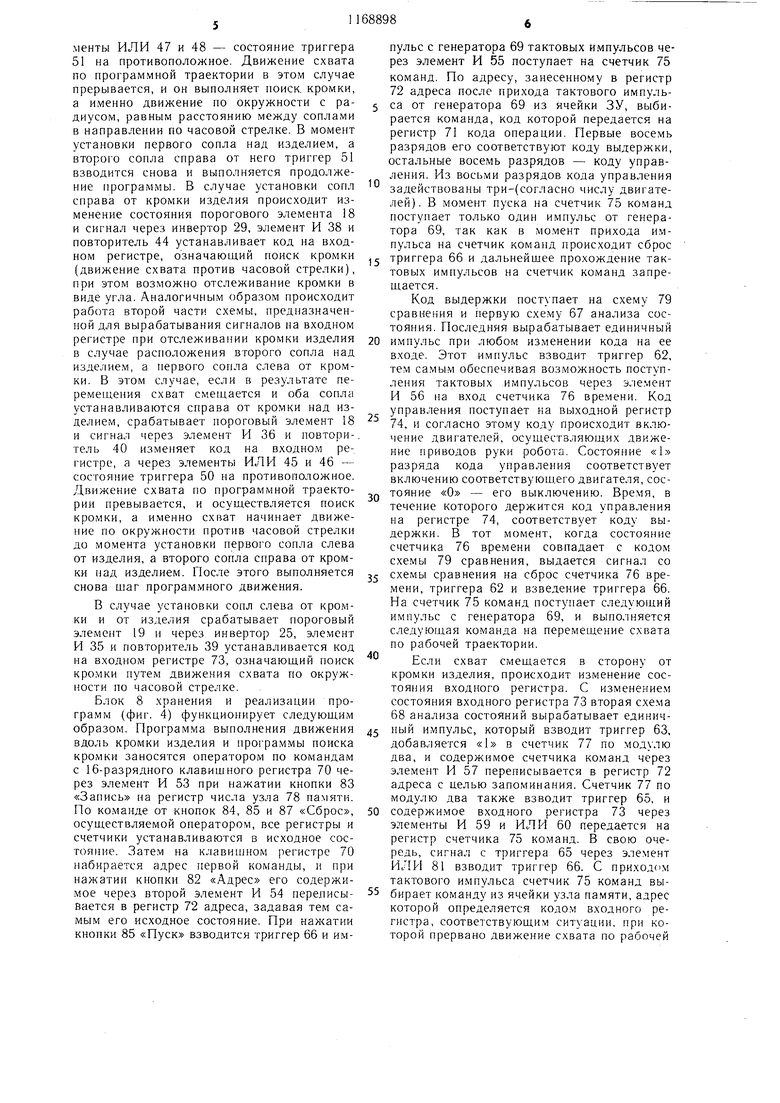
Пневматический датчик (фиг. 2) имеет корпус 11, измерительные каналы 12, входные пневматические сопротивления 13, выходные пневматические сопротивления 14, питаюшую емкость 15, струйные сопла 16, а также механизм I 7 регулирования взаимного расположения сопл.
Блок 7 оценки ситуации содержит пороговые элементы 18-23, инверторы 24-29 элементы И 30-38, повторители 39-44, элементы ИЛИ 45--48, RC-триггеры 49-51, кнопку 52.
Блок 8 хранения и реализации программ содержит элементы И 53-59, ИЛИ. 60 и 61, триггеры 62-66, схемы 67-68 анализа состояний, генератор 69 тактовых импульсов, клавишный регистр 70, регистр 71 кода операций, регистр 72 адреса, входной 73 и выходной 74 регистры, счетчик 75 команд.
счетчик 76 времени, счетчик 77 по модулю два, узел 78 памяти, схему 79 сравнения, линию 80 задержки, элемент ИЛИ 81, кнопки 82-87 соответственно «Адрес, «Запись «Сброс, «Пуск, «Сброс, «Сброс.
Устройство работает следующим образом.
При выполнении конкретной технологической операции, например сварки, в схвате 3 устанавливается рабочий инструмент 4 (сварочный аппарат). Пневмодатчик 5 располагается над задающей поверхностью детали 9 (кромка свариваемой поверхности), и задается рабочий режим процесса обработки. В ходе технологического процесса пневмодатчик отслеживает положение обрабатываемой поверхности детали относительно рабочего инструмента 4 и при отклонении от рабочего режима (уход с кромки, изменение расстояния до поверхности обработки) выдает пневматические сигналы в блок 7 оценки ситуации по двум независимым каналам. Блок 8 хранения и реализации программ получает информацию от блока 7 оценки ситуаций о режиме обработки и при необходимости вносит коррекцию, формируя управляющие сигналы и воздействуя на исполнительные механизмы 2 звеньев манипулятора для компенсации недопустимых отклонений.
Пневматический датчик 5 работает следующим образом. В питающую емкость 15 подается сжатый воздух, предварительно прощедщий фильтр и стабилизатор давления (не показаны). Проходя через входные пневматические сопротивления 13, воздух попадает в измерительные каналы 12, давление в которых зависит от положения струйных сопл 16 относительно поверхности обрабатываемой детали (или другой задающей поверхности). Например, в режиме слежения за кромкой (фиг. 1) давление в измерительном канале с соплом, расположенным над поверхностью, соответствует расстоянию до поверхности, а в канале с соплом, расположенным за кромкой оно минамально. При отклонении в ту или другую сторону давления в одном из каналов соответственно изменяются. Точность позиционирования датчика в каждом конкретном случае зависит от расстояний между соплами и от рабочего расстояния каждого сопла до поверхности детали, которые точно настраиваются с помощью механизма 17 регулирования взаимного расположения сопл. Давления в измерительных каналах 12 передаются через выходные пневматические сопротивления 14, пневмоэлектрический преобразователь в блок 7 оценки ситуаций и блок 8 хранения и реализации программ, которые преобразуют информационные пневматические сигналы в сигналы управления рукой манипулятора. Информационные сигналы, проходя через пневмомектрический преобразователь 6 (фиг. 1) по двум независимым каналам (например, на базе преобразователей типа ИКД), поступают в блок 7 оценки ситуаций, который производит передачу поступающих сигналов на соответствующие разряды входного регистра блока хранения и реализации программ в зависимости от создавщейся ситуации в расположении сопл датчика по отношению к контролируемому изделию. Блок 8 хранения и реализации программ осуществляет автоматический периодический прием информации, поступающей с блока оценки ситуаций, ее обработку и выдачу на исполнительное устройство в соответствии с заданной программой.
5 Блок 7 оценки ситуаций в режиме отслеживания кромки работает следующим образом. Перед началом работы путем нажатня кнопки 52 (фиг. 3) все триггеры блока оценки ситуаций устанавливаются в исходное состояние. Затем схват робота
0 в ручном режиме устанавливается таким образом, что оба соп.ча датчика находятся слева или справа от кромки и и.чделия.
В этом случае происходит срабатывание триггера 49, сигнал на S-вход которого поступает от пороговьгх элементов 18 и 19 через инверторы 24 и 26 и элемент И 30. После этого схват робота устанавливается так, что кромка изделия находится между соплами. В этом случае, ec:ni первое сопло
0 оказывается над изделием, срабатывает триггер 51, так как на 5-вход его поступает единичный сигнал, который формируется элементами И 32 и 34 и инвертором 28, если второе сопло - триггер 50, на S-вход которого поступает единичный сигнал,
сформированный элементами И 31 и 33 и инверторо.м 27. Высокий потенциал с прямых выходов этих триггеров через повторители 43 и 41 поступает на соответствующие разряды входного регистра 73 блока 8 хранения и реализации программ, вызывая запуск программ для выполнения первого тага движения схвата робота в автоматическом режиме. Движение начинает ся после предварительной установки схвата на нужно высоте над изделием с помощью кронштейна 10 Ji механизма 17 регулирования взаимного расположения сопл. Информация о повышении высоты над изделием поступает на входной регистр 73 блока 8 хранения и реализации г poгp;iм с выходов пороговых элементов 20 и 22,
0 о понижении высоты - с выходов пороговых элементов 2-1 и 23. После установки схвата на нужной высоте Biiino.iHHется шаг вдоль программной траектории. Если в результате этого перемещения схваг смешается и оба сопла устанавливаются
5 слева от кромки над изделием, ciiaCarhвает псм оговый э.юмепт 19 и сш.ча. элемент И 37 и повторитель 42 на входном рогlioino 73. а , аменты ИЛИ 47 и 48 - состояние триггера 51 на противоположное. Движение охвата по программной траектории в этом случае прерывается, и он выполняет поиск, кромки, а именно движение по окружности с радиусом, равным расстоянию между соплами в направлении по часовой стрелке. В момент установки первого сопла над изделием, а второго сопла справа от него триггер 51 взводится снова и выполняется продолжение программы. В случае установки сопл справа от кромки изделия происходит изменение состояния порогового элемента 18 и сигнал через инвертор 29, элемент И 38 и повторитель 44 устанавливает код на входном регистре, означающий поиск кромки (движение схвата против часовой стрелки), при этом возможно отслеживание кромки в виде угла. Аналогичным образом происходит работа второй части схемы, предназначенной для вырабатывания сигналов на входном регистре при отслеживании кромки изделия в случае расположения второго сопла над изде;|ием, а первого сопла слева от кромки. В этом случае, если в результате перемещения схват смещается и оба сопла устанавливаются справа от кромки над изделием, срабатывает пороговый элемент 18 и сигнал через элемент И 36 и повтори-, тель 40 изменяет код на входном регистре, а через элементы ИЛИ 45 и 46 - состояние триггера 50 на противоположное. Движение схвата по программной траектории превывается, и осуществляется поиск кромки, а именно сх«ат начинает движение по окружности против часовой стрелки до момента установки первого сопла слева от изделия, а второго сопла справа от кромки над изделием. После этого выполняется снова шаг программного движения.
В случае установки сопл слева от кромки и от изделия срабатывает пороговый элемент 19 и через инвертор 25, элемент И 35 и повторитель 39 устанавливается код на входном регистре 73, означающий поиск кромки путем движения схвата по окружности по часовой стрелке.
Блок 8 хранения и реализации программ (фиг. 4) функционирует следующим образом. Программа выполнения движения вдоль кромки изделия и программы поиска кромки заносятся оператором по командам с 16-разрядного клавищного регистра 70 через элемент И 53 при нажатии кнопки 83 «Запись на регистр числа узла 78 памяти. По команде от кнопок 84, 85 и 87 «Сброс, осуществляемой оператором, все регистры и счетчики устанавливаются в исходное состояние. Затем на клавишном регистре 70 набирается адрес первой команды, и при нажатии кнопки 82 «Адрес его содержимое через второй элемент И 54 перелисывается в регистр 72 адреса, задавая тем самым его исходное состояние. При нажатии кнопки 85 «Пуск взводится триггер 66 и импульс с генератора 69 тактовых импульсов через элемент И 55 поступает на счетчик 75 команд. По адресу, занесенному в регистр 72 адреса после прихода тактового импульса от генератора 69 из ячейки ЗУ, выбирается команда, код которой передается на регистр 71 кода операции. Первые восемь разрядов его соответствуют коду выдержки, остальные восемь разрядов - коду управления. Из восьми разрядов кода управления задействованы три-(согласно числу двигателей). В мо.мент пуска на счетчик 75 команд поступает только один импульс от генератора 69, так как в мо.мент прихода импульса на счетчик команд происходит сброс
5 триггера 66 и дальнейшее прохождение тактовых импульсов на счетчик команд запрещается.
Код выдержки поступает на схему 79 сравнения и первую схему 67 анализа состояния. Последняя вырабатывает единичный
0 импульс при любом изменении кода на ее входе. Этот импульс взводит триггер 62, тем самым обеспечивая возможность поступления тактовых импульсов через элемент И 56 на вход счетчика 76 времени. Код управления поступает на выходной регистр 74, и согласно этому коду происходит включение двигателей, осуществляющих движение приводов руки робота. Состояние «1 разряда кода управления соответствует включению соответствующ.его двигателя, сосQ тояние «О - его выключению. Время, в течение которого держится код управления на регистре 74, соответствует коду выдержки. В тот момент, когда состояние счетчика 76 вре.мени совпадает с кодом схемы 79 сравнения, выдается сигнал со
схемы сравнения на сброс счетчика 76 времени, триггера 62 и взведение триггера 66. На счетчик 75 команд поступает следующий импульс с генератора 69, и выполняется следующая команда на перемещение схвата по рабочей траектории.
Если схват смещается в сторону от кромки изделия, происходит изменение состояния входного регистра. С изменение.м состояния входного регистра 73 вторая схе.ма 68 анализа состояний вырабатывает единичный импульс, который взводит триггер 63, добавляется «Ь в счетчик 77 по модулю два, и содержимое счетчика команд через элемент И 57 переписывается в регистр 72 адреса с целью запо.минания. Счетчик 77 по модулю два также взводит триггер 65, и
0 содержимое входного регистра 73 через элементы И 59 и ИЛИ 60 передается на регистр счетчика 75 команд. В свою очередь, сигнал с триггера 65 через элемент ИЛИ 81 взводит триггер 66. С приход(м тактового импульса счетчик 75 команд выбирает команду из ячейки узла памяти, адрес которой определяется кодом входного регистра, соответствующим сит ации. при которой прервано движение схвата по рабочей траектории. Программа поиска кромки изделия выполияется до тех пор, иока схват не устанавливается над ней. В этом случае снова происходит изменение состояния входного регистра. Счетчик 77 по модулю два взводит триггер 64, и на регистр счетчика 75 команд с регистра 72 адреса через элементы И 58 и ИЛИ 60 переписывается адрес, на котором была прервана программа движения схвата по траектории. С приходом тактового импульса выполнение программы продолжается. В том случае, если в результате поиска кромка изделия не найдена, с приходом последней команды поиска выдается сигнал на останов движения руки робота. Все движения схвата вдоль программной траектории и по ее коррекции выполняются с помощью двух двигателей с приводами. Третий двигатель с приводом осушествляет поддержамие схвата на определенном расстоянии от изделия. Сигналы на включение реле питания двигателей поступают от выходного регистра устройства хранешгя и реализации программ. Техническое преимущество изобретения заключается в возможности коррекции программного движения схвата с рабочим инстру.ментом в зависимости от формы обрабатываемой поверхности, что позволяет улучшить показатели качества обработки и исключить брак. Наличие адаптивной системы управления рукой манипулятора дает возможность использовать устройство в робототехнике, расширить диапазон технологических операций по сравнению с известным устройством, а также повысить точность обработки и устранить брак из-за случайных отклонений формы -заготовок. УчЧ
| Рука манипулятора | 1976 |
|
SU614938A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Пневмоавтоматика | |||
| Сборник | |||
| М., «Наука, 1982, с | |||
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
