1
Изобрютение относится к авиационным дистанционным магнитным компасам (11ЛЖ предназначенным для коррекции курсовых гироскопов.
Известный ДМК состоит из двухкомпонентного индукционного датчика (ИД) магнитного поля Земли (МПЗ), чувствительные элементы которого расположены на карданном подвесе, сельсине или синуснокосинусного трансформатора и следшцей системы формирования магнитного курса. ДМК с и:щукционными компонентными :Датччками МПЗ на карданном подвесе имеют карданную погрешность.
Цель изобретения - упрощение устройства и повышение точности измерения.
Это достигается тем, что входы второго дeмoz yлятopa подключены к сигнальнымобмоткам датчика магнитного поля Земля а его выход - к выходу демодулятора избирательного усилителя.
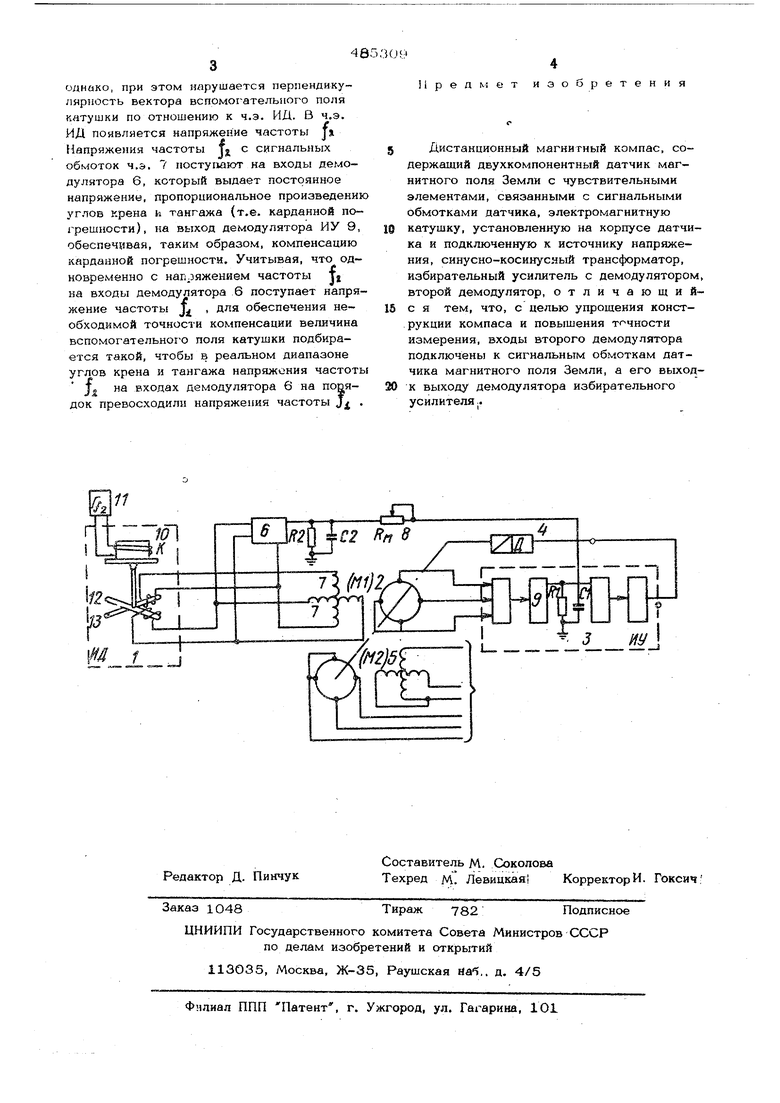
На чертеже схематически изобрежек ДМК, состоящий из двухкомпопентного ИД МПЗ 1. следящей системы сормирова1ния магнитного курса, включающей в себя
синусно-косинусный трансформатор (ЛА1) 2, избирательный усилитель (ИУ)3, двигатель с редуктором (Д)4. Синусно-косннусш.ай тра лсформатор (М2)5 предназначен для Выдачи курсовой инс ормации по1реби-гелк:. В JSMK дополнительао включены демодулятор 6, входы которого подключены к сигнальным обмоткам (Mil) 7, а выход через масштабный резистор FfM - к выходу демодулятор j (ИУ)8, и катушка (К) 1О, расположенная вертикально на корпусе ЙД и лодключенная к источнику напряжения (rfj ) частоты 11, отличной от частчугы питания ИД (4 ). R1. CI и R2,C2 {агрузка и фильтр соответственно демодулятора ИУ 9 8 демодул5ггора 6. При отсутствии крена ялв тангаха BcnoMot-ательнов переменное поле перпеядгкулярио к чувствительным элементам (ч.э,) ИД (12, 13),
и в сигнальных обмотках ИД, расположенных в плоскости горизонта, отсутствусТ напряжение частоты Jj . При наклоне корпуса ИД с расположенной на нем катушкой ч.э. ИД сохраняют свое положение в плоскости гориэонтп,
однако, при этом нарушается перпендикулярность вектора вспомогательного поля катушки по отношению к н.э. ИД. В ч.э. ИД появляется напряжение частоты fi Напряжения частоты Jj с сигнальных обмоток ч.э. 7 поступают на входы демодулятора 6, который выдает постоянное напряжение, пропорциональное произведению углов крена и тангажа (т.е. карданной погрешности), на выход демодулятора ИУ 9, обеспечивая, таким образом, компенсацию карданной погрешности. Учитывая, что од новременно с напряжением частоты fj на входы демодулятора 6 поступает напряжение частоты Jjj , для обеспечения необходимой точности компенсации величина вспомогательного поля катушки подбирается такой, чтобы в реальном диапазоне углов крена и тангажа напряжения частоты
j на входах демодулятора 6 на пооядок превосходили напряжения частоты J .
Предмет изобретения
Дистанционный магнитный компас, содержащий двухкомпонентный датчик магнитного поля Земли с чувствительными элементами, связанными с сигнальными обмотками датчика, электромагнитную
катушку, установленную на корпусе датчика и подключенную к источнику напряжения, синусно-косинусяый трансформатор, избирательный усилитель с демодулятором, второй демодулятор, отличающийс я тем, что, с целью упрощения конструкции компаса и повышения т чности измерения, входы второго демодулятора подключены к сигнальным обмоткам датчика магнитного поля Земли, а его выходк выходу демодулятора избирательного усилителя..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Дистанционный магнитный компас | 1973 |
|
SU463859A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1993 |
|
RU2077029C1 |
| Магнитометр | 1980 |
|
SU935839A1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 1998 |
|
RU2130588C1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| ЦИФРОВАЯ МАГНИТНАЯ КОМПАСНАЯ СИСТЕМА С КОРРЕКЦИЕЙ | 2020 |
|
RU2769922C2 |
