Изобретение относится к навигационному приборостроению, в частности к измерителям магнитного курса недвижных объектов ;
Целью изобретения является повышение точности за счет уменьшения влияния ошибок, обусловленных негоризонтальностью осей чувствительности ферромодуляционных преобразова- телейо
На фиг о 1 изображена функциональная схема описываемого устройства; на фиг о 2 - схема вычисления; на фиг о 3 и 4 - схемы расположения осей устройства в земной системе координат
Устройство состоит из датчика 1, жестко закрепленных на двухосном маятнике (не показан) двух ферромо- дуляционных преобразователей (ФМП) 2,3, каждый из которых имеет обмотки возбуждения (входы), соединенные с генератором 4 возбуждения, и сигнальные обмотки (выходы). ФМП 2 и 3 установлены на площадке двухосного маятника так, что при отсутствии углов тангажа и крена объекта их оси чувствительности параллельны соответственно продольной и поперечной осям объектао Индукционный датчик 1 установлен в соленоиде 5, соединенном с генератором 6 опорного поля, так,что при отсутствии углов тангажа и кре- на оси чувствительности ФМП 2,3 пер- пендикулярны- магнитной оси соленоида и лежат в его экваториальной плоскости. При наличии вышеупомянутых углов магнитная ось соленоида совпадает с нормальной осью объекта, что достигается жестким креплением соленоида к корпусу (не показан) В состав индукционного компаса входит указатель 7 вертикалио Его выходы соединены соответственно с пер- выми входами элементов 8 и 9 сравнения, вторые входы которых соответственно связаны с выходами блоков расшифровки тангажа 10 и крена 11 индукционного датчика 1
Выходы элементов 8 и 9 сравнения соединены с первым и вторым входами вычисления 12 Третьим и четвертым входами вычислитель 12 соединен с элементами 3 и 2 соответственно,пя- тым входом - с преобразователем 13. Выходы вычислителя соединены с входами блока 14 расшифровки курса, выходом которого является угол магнитного курса„ Вход преобразователя 13 подключен к выходу генератора 4,
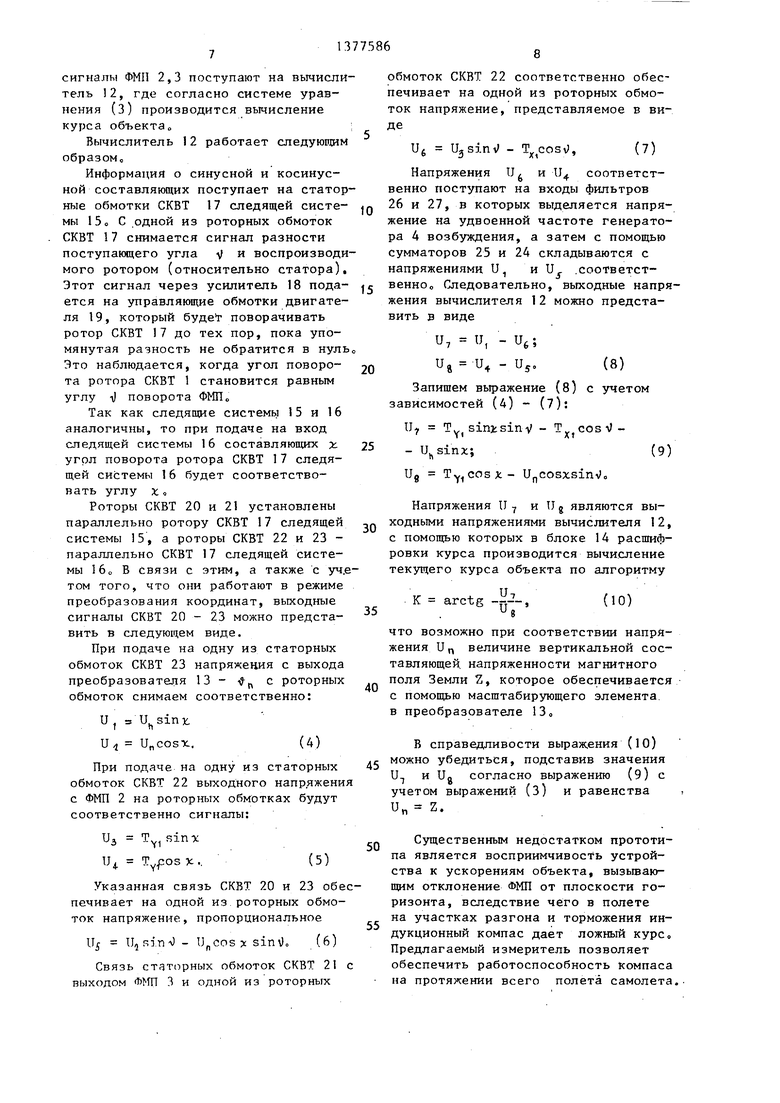
Вычислител) 12 состоит из двух аналог11чных следящих систем 15 и 16, состоящих соответственно из синусно- косинусного вращающегося трансформатора (СКВТ) 17, одной из роторных обмоток соединенного с входом усилителя 18. Выход усилителя 18 связан с двигателем-редуктором 19, который выходной осью жестко соединен с ротором СКВТ 17о Статорные обмотки СКВТ 17 следяш 1х систем 15 и 16 являются первым и вторьм входами вычислителя 12 соответственно
На выходных осях двигателей 19 следящих систем 15 и 16 посажены СКВТ 20,21 и 22,23 соответственно параллельно СКВТ 17. При этом СКВТ
20- 23 работают в режиме преобразователей координат. Вход (одна из ста- торных обмоток) СКВТ 23 является пятым входом вычислителя 12„ Один из выходов (роторная обмотка) СКВТ 23 соединен с входом СКВТ 20, выходом подключенного к первому входу сумматора 24о Вторым выходом СКВТ 23 подключен к первому входу сумматора
25. Одни из статорных обмоток СКВТ
21и 22 являются третьим и четвертым входами вычислителя,а одни из роторных обмоток соединены посредством фильтров 26, 27 соответственно с вторыми входами сумматоров 25 и 24„При- чем д1)угая роторная обмотка СКВТ 22 соединена с второй статорной обмоткой СКВТ 21 о Выходы сумматоров 24,
25 являются выходами вычислителя 12 Фильтры 26- и 27 настроены на удво- енную частоту генератора 4
В качестве указателя 7 вертикали может использоваться гировертикаль любого типа (в зависимости от соста- ва бортовой аппаратуры навигационного комплекса), в частности центральная гировертикаль.
Блок 10 расшифровки тангажа,блок 11 расшифровки крена, блок 14 расшифровки курса, генератор 4 возбуждения, генератор 6 опорного поля,соленоид 5 аналогичны соответствующим блокам и элементам устройства-прототипа и работают в тех же режимах.
В качестве элементов 8,9 сравнения в этом случае могут применяться СКВТ любого типа, механически связанные роторами с роторами СКВТ-при- емников блоков 11 и 12, статорными
10
15
обмотками электрически соединенные со статорными обмотками соответствующих выходных СКВТ тангажа и крена гировертикали (указателя 7 вертикали) и статорами закреплены так,что с роторных обмоток можно снять напряжения, пропорциональные синусной и косинусной составляющим углов и X соответственно (фиго4)о
Преобразователем I 3 могут служить последовательно соединенные удвоитель частоты и масштабирующий элемент, например масштабный вращаюш тй- ся трансформатор, позволяющий регулировать амплитуду принимающего напряжения „ .
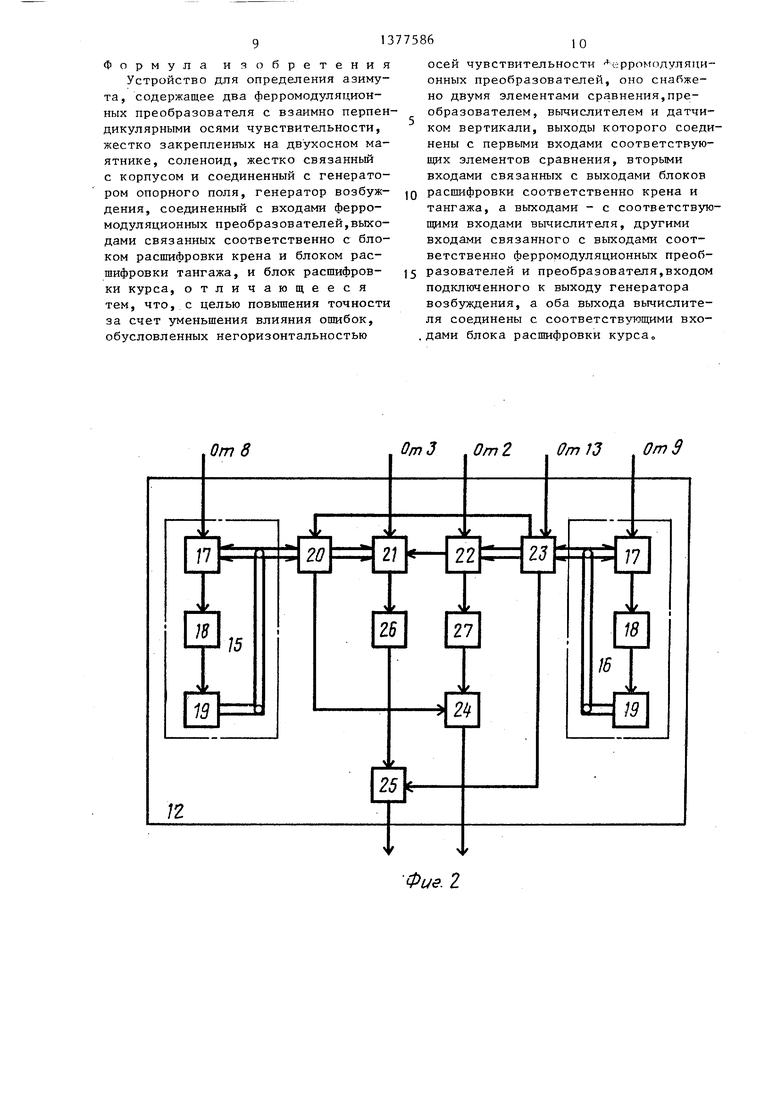
Принцип работы устройства ясен из фиг. 3 и 4о На фиг.З изображен общий случай ориентации осей чувствительности ФМП 2 и 3 относительно осей, связанных с объектом. При этом изображенная система OXcYj-Z (. связана с объектом, а оси ОХ , OY, и OZ - с осями чувствительности ФМП, Оси чувствительности ОХ, OYj-., OZ параллельны соответственно поперечной, продольной и нормальной осям объектао Углы if-f,H углы приборных значений тангажа и крена при раз- зо мотках ЬМП будут наводиться ЭДС,про- воротах объекта относительно площадки с ФМП Вектор напряженности Н соленоида 5, закрепленного по нормальной оси объекта, проектируется на оси чувствительности ФМП 3 и 2 в виде составляющих
20
25
1,- L V
У - т(, (2)
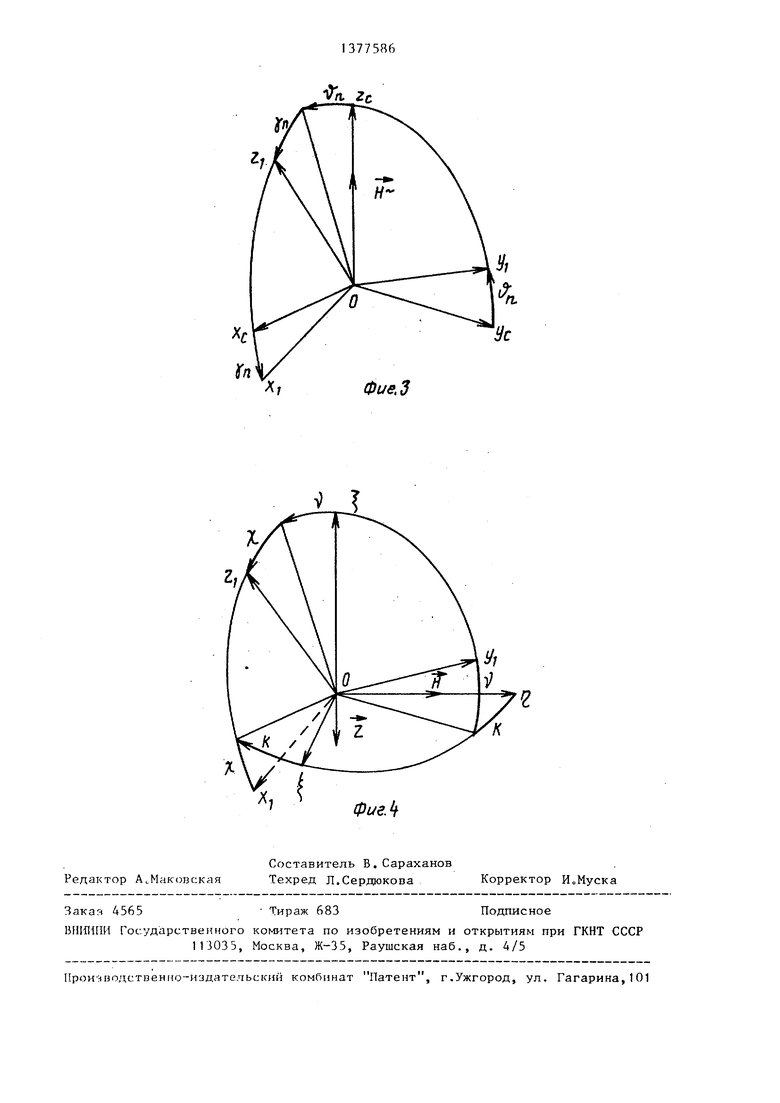
Чертеж (фиГзА) отражает общий случай ориентации осей чувствительности ФМП 2 и 3 относительно земной системы координат , у которой ось 0 лежит в плоскости магнитного меридиана и направлена на магнитный север- ньй полюс, а ось О вертикальна. Система координат , связана с осями чувствительности ФМП 2 и 3 оговоренным выше способоМоУгол К есть угол магнитного курса, а угол -О и угол X - углы отклонения площадки с ФМП от плоскости горизонта. Вектор Т напряженности магнитного поля Земли изображен на фиг о 4 составляющими: горизонтальной Н и вертикальной Z
Измеряемые проекции вектора ФМП 2,3 можно представить в виде
Tj5, H(-sinKcos х - cosKsinxsin i) + + Z coS Jsinx
Т Y Н cos К cosV - Zsin), (З) Следовательно, в сигнальных об35
порциональные проекциям Т и Т у на удвоенной частоте возбуждения, и ЭДС, пропорциональные проекциям Тxi и Т на частоте генератора опорного поля о
ЭДС с сигнальной обмотки ФМП 2 поступает на вход блока 10 расшифровки тангажа, где согласно второму (1) уравнению системы (1) вычисляется текущее значение угла 0,
Х1
- H cosc sin
h
Ут:;:, rsint,,
Очевидно, что при отсутствии возмущающих воздействий на площадку с ФМП оси чувствительности ФМП будут лежать в плоскости горизонта, а углы tJ и VI будут соответствовать истинным углам тангажа (t) и крена (у) объекта.
При отклонениях площадки от плоскости горизонта, вызванных изменениями скорости движения объекта,приборные значения углов у будут отличаться от истинных на величину отклонения соответствующей оси чувствительности ФМП 2 или 3 от плоскости горизонта.
Обозначим разность между приборными и истинными значениями углов тангажа и крен а как
(1)
мотках ЬМП будут наводиться ЭДС,про-
1,- L V
У - т(, (2)
Чертеж (фиГзА) отражает общий случай ориентации осей чувствительности ФМП 2 и 3 относительно земной системы координат , у которой ось 0 лежит в плоскости магнитного меридиана и направлена на магнитный север- ньй полюс, а ось О вертикальна. Система координат , связана с осями чувствительности ФМП 2 и 3 оговоренным выше способоМоУгол К есть угол магнитного курса, а угол -О и угол X - углы отклонения площадки с ФМП от плоскости горизонта. Вектор Т напряженности магнитного поля Земли изображен на фиг о 4 составляющими: горизонтальной Н и вертикальной Z
Измеряемые проекции вектора ФМП 2,3 можно представить в виде
Tj5, H(-sinKcos х - cosKsinxsin i) + + Z coS Jsinx
Т Y Н cos К cosV - Zsin), (З) Следовательно, в сигнальных об- зо мотках ЬМП будут наводиться ЭДС,про-
35
40
порциональные проекциям Т и Т у на удвоенной частоте возбуждения, и ЭДС, пропорциональные проекциям Тxi и Т на частоте генератора опорного поля о
ЭДС с сигнальной обмотки ФМП 2 поступает на вход блока 10 расшифровки тангажа, где согласно второму уравнению системы (1) вычисляется текущее значение угла 0,
Выходной сигнал блока расшифровки тангажа поступает на один из входов элемента 8 сравнения, на второй вход которого поступает текущее значение угла л) с указателя 7 вертикали Элемент 8 сравнения обеспечивает подачу на вход .вычислителя инфор- мации о ij ,
ЭДС с сигнальной обмотки ФМП 3
д поступает на вход блока 11 расишф- ровки крена, где согласно системе (1 ) вычисляется текуп;ее значение- угла у.,Текущие значения г и 1Г (с указателя 7 вертикали) поступают на
элемент 9 сравнения, выходным сигналом которого является информация ох.
Выходная информаг1;ия о , х с элементов 8 н 9 грлвнения, выходные
45
сигналы ФМП 2,3 поступают на вычислитель 12, где согласно системе уравнения (З) производится вычисление курса объекта
Вычислитель I2 работает следуюпдам образом
Информация о синусной и косинусной составляющих поступает на статор ные обмотки СКВТ 17 следящей системы 15о С .одной из роторных обмоток СКВТ 17 снимается сигнал разности поступающего угла V и воспроизводимого ротором (относительно статора). Этот сигнал через усилитель 18 пода- ется на управляющие обмотки двигателя 19, который буде г поворачивать ротор СКВТ 17 до тех пор, пока упомянутая разность не обратится в нуль Это наблюдается, когда угол поворота ротора СКВТ 1 становится равным углу т) поворота ФМП„
Так как следящие системы 15 и 16 аналогичны, то при подаче на вход следящей системы 16 составляющих х угол поворота ротора СКВТ 17 следящей системы 16 будет соответствовать углу Хо
Роторы СКВТ 20 и 21 установлены параллельно ротору СКВТ 17 следящей системы 15, а роторы СКВТ 22 и 23 - параллельно СКВТ 17 следящей системы 16о В связи с этим, а также с уч.е том того, что они работают в режиме преобразования координат, выходные сигналы СКВТ 20 - 23 можно представить в следующем виде.
При подаче на одну из статорных обмоток СКВТ 23 напряжения с выхода
преобразователя 13 - с роторных обмоток снимаем соответственно:
и
1
U| sin 1C
обмоток СКВТ 22 соответственно обеспечивает на одной из роторных обмоток напряжение, представляемое в виде
Uj UgSinV - )
(7)
Напряжения U и U соответственно поступают на входы фильтров 26 и 27, в которых выделяется напряжение на удвоенной частоте генератора 4 возбуждения, а затем с помощью сумматоров 25 и 24 складываются с напряжениями U, и U .соответственное Следовательно, выходные напряжения вычислителя 12 можно представить э виде
U, -и,;
20
Ug и - Ujo
(8)
Запишем выражение (8) с учетом зависимостей (4) - (7):
- TX,
- U sinx;
Ug TY COSX- UpCOsxsinV.
(9)
Напряжения U и TI g являются вы- ХОДНЫМИ напряжениями вычислителя 12, с помощью которых в блоке 14 расшифровки курса производится вычисление текущего курса объекта по алгоритму
35
К arctg -ц--,
(10)
что возможно при соответствии напряжения и величине вертикальной составляющей, напряженности магнитного поля Земли Z, которое обеспечивается с помощью масштабирующего элемента. в преобразователе 13
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |
| Измеритель углов поворота подвижного объекта | 1984 |
|
SU1186948A1 |
| Измеритель составляющих углов поворота подвижного объекта | 1983 |
|
SU1145248A1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629691C1 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
| Управляемый инфранизкочастотный фазовращатель | 1981 |
|
SU980249A1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1120386A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
Изобретение относится к навигационному приборостроению Цель изобретения - повышение точности за счет уменьшения влияния ошибок, обусловленных негоризонтальностью осей чувствительности ферромодуляционных .преобразователей. В сигнальных обмотках ферромодуляционных преобразователей 2 и 3 (ФМП) будут наводиться ЭДС, пропорциональные проекциям вектора напряженности магн. поля Земли на удвоенной частоте возбуждения и на частоте генератора опорного поля о ЭДС с сигнальной обмотки ФМП 2 (З) поступает на вход блока 10 (п) рас- игифровки тангажа, где вычисляются текущие значения углов тангажа и крена, которые поступают на элемент 9 сравнения. Информация с последнего и выходные сигналы с ФМП 2,3 поступают на вычислитель 12, где согласно системе уравнений производится вычисление курса объекта о 4 ило Q « 00 СП 00 О5
и Upcosx.
(А)
При подаче на одну из статорных обмоток СКВТ 22 выходного напряжения с ФМП 2 на роторных обмотках будут соответственно сигналы:
из Т, sin-x
(5)
и. X..
Указанная связь СКВТ 20 и 23 обеспечивает на одной из роторных обмоток напряжение, пропорциональное
и U Rin-O- U cosxsin)o (б)
Связь статорных обмоток СКВТ 21 с выходом 3 и одной из роторных
В справедливости выраж,ения (Ю) можно убедиться, подставив значения и и Ug согласно выражению (9) с учетом выражений (З) и равенства
.
Существенным недостатком прототипа является восприимчивость устройства к ускорениям объекта, вызьшаю- щим отклонение ФМП от плоскости горизонта, вследствие че:го в полете на участках разгона и торможения индукционный компас дает ложньй курс. Предлагаемый измеритель позволяет обеспечить работоспособность компаса на протяжении всего полета самолета.
Формула изобретения Устройство для определения азимута, содержащее два ферромодуляцион- ных преобразователя с взаимно перпендикулярными осями чувствительности, жестко закрепленных на двухосном маятнике, соленоид, жестко связанный с корпусом и соединенный с генератором опорного поля, генератор возбуждения, соединенный с входами ферро- модуляционных преобразователей,выходами связанных соответственно с блоком расшифровки крена и блоком расшифровки тангажа, и блок расшифровки курса, отличающееся тем, что, с целью повышения точности за счет уменьшения влияния ошибок, обусловленных негоризонтальностьк
осей чувствительности ч;рромодуляци- онных преобразователей, оно снабжено двумя элементами сравнения,преобразователем, вьиислителем и датчиком вертикали, выходы которого соединены с первыми входами соответствую- И1ИХ элементов сравнения, вторыми входами связанных с выходами блоков
расшифровки соответственно крена и тангажа, а выходами - с соответствующими входами вычислителя, другими входами связанного с выходами соответственно ферромодуляционных преобразователей и преобразователя,входом подключенного к выходу генератора возбуждения, а оба выхода вычислителя соединены с соответствующими вхо- дами блока расшифровки курса.
ОтЗ От 2 Omld От 3
Фие. г
Редактор А Мак овская
Составитель В.Сараханов Техред Л.Сердюкопа
Заказ 4565
Тираж 683
511Ш1ПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Прои-ниодственно-йздательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Фие.З
ФигЛ
Корректор ИоМуска
Подписное
