со vi
сд
ОС СП
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Измеритель углов ориентации подвижного объекта | 1991 |
|
SU1793228A1 |
| Измеритель углов поворота подвижного объекта | 1984 |
|
SU1186948A1 |
| ИНДУКЦИОННЫЙ КОМПАС | 1973 |
|
SU395716A1 |
| Измеритель составляющих углов поворота подвижного объекта | 1983 |
|
SU1145248A1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ОБЪЕКТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ | 2016 |
|
RU2629691C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
Изобретение относится к измерителям маги.курса подвижных объектов. Цель изобретения - повьшение точности за счет уменьшения влияния ошибок, обусловленных негоризонтальностью осей чувствительности ферро- модуляционных преобразователей,При отклонениях площадки маятника от плоскости горизонта, вызванных изме.нениями скорости движения объекта, приборные значения углов будут отличаться от истинных на величину отклонения соответствующей оси чувствительности ферромодуляционных преобразователей (ФМП) 2 и 3 от плоскости горизонта 15 сигнальных обмотках ФМП 2,3 и 4 наводятся ЗДС,пропорциональные проекциям вектора напряженности магнополя Земли При поступлении на входы 19 и 20 сигналов с ФМП 3 и 4, а на вход 18 - сигнала, пропорционального углу отклонения площадки ФМП 2-4 от плоскости горизонта, на выходах 16 и 23 будут вырабатываться пропорциональные сигналы и. и и. соответственно, которые поступают на входы блока 21 расшифровки курса, на выходе которого получают сигнал о магн.курсе объекта. 3 -ил о i (Л С
Изобретение относится к навигационному приборостроению, в частности к измерителям магнитного курса подвижных объектов.
Целью изобретения является повышение точности за счет уменьшения влияния ошибок, обусловленных негоризонтальностью осей чувствительности ферромодуляционнык преобразова- телейо
На фиг.1 изображена функциональная схема предлагаемого устройства; на фиг о 2 - 3 - схемы расположения осей устройства в земной системе координат.
Устройство состоит из индукционного датчика 1, содержащего три фер- ромодуляционных преобразователя (ФМП) 2-4, каждый из которых име- ет обмотки возбуждения (входы),соединенные с генератором 5 возбуждения, и сигнал ьные обмотки (выходы). Первый, второй и третий ФМ11 2-4 установлены на площадке двухосного маятника так, что при отсутствии углов -тангажа и крена объекта их оси чувствительности совпадают соответственно с поперечной, продольной и нормальной осями объекта Индукционный датчик 1 установлен в соленоиде 6, соединенном с генератором 7 опорного поляс Соленоид 6 охватывает индукционный датчик 1 таким образом, что при отсутствии тангажа и крена объек та ось чувствительности.нормального ФМП 4 совпадает с магнитной осью соленоида 6, а оси чувствительности ФМП 2,3 лежат в экваториальной плоскости соленоида. При наличии вышеупо мянутых углов магнитная ось соленоида совпадает с нормальной осью объекта, что достигается жестким креплением соленоида к объекту.
В состав индукционного компаса входит датчик 8 вертикали. Выходы датчика 8 вертикали соединены-соответственно с первыми входами элементов 9 и 10 сравнения, вторые входы которых связаны с выходами блоков расшифровки тангажа и крена 11 и 12 соответственно индукционного датчика 1 о
Выход элемента 9 сравнения связан с первым входом 13 первого преобразо вателя 14 координат о Второй вход 15 аервого преобразователя 14 координат, как и вход блока 11 расшифровки тангажа, соединен с выходом продольного ФМП 2 о Дополнительный вход 16 преобразователя 14 координат соединен с дополнительным выходом преобразователя 17 координат, первый вход 18 которого соединен с выходом элемента 10 сравнения, а второй и дополнительный входы 19 и 20 связаны с входами блока 12 расшифровки крена и выходами поперечного и нормального ФМП 3 и 4 соответственно о Блок 21 расшифровки курса имеет выход, несущий информацию об угле курса, и входы, соединенные соответст- с выходом 22 преобразователя 14 координат и выходом 23 преобразователя 17 координато
В качестве указателя вертикали может использоваться гировертикаль любого типа в зависимости от состава бортовой аппаратуры навигационного комплекса В качестве блока расшифровки тангажа может использоваться (в простейшем случае) следящая система крена устройства прототипа,котора состоит из синусно-косинусного вращающегося трансформатора (СКВТ)-приемника, обмоткой статора соединенно го с генератором опорного поля, а синусной обмоткой ротора - с сигнальной обмоткой ФМП, и фильтра,настроенного на частоту генератора опорного поля о Фильтр, в свою очередь, посредством усилителя соединен с двигателем-редуктором ,механически связанным с .ротором СКВТ-приемника о При этом угол разворота ротора относительно статора будет соответствовать приборному значению угла тангажа.
Блок 12расшифровки крена и блок 21 расшифровки курса аналогичны и в их качестве может использоваться следящая система, аналогичная следящей системе курса устройства-прототипа, состоящая соответственно из СКВТ-приемника, фильтра, усилителя и двигателя с редуктором, механически связанным с ротором СКВТ-приемникао При использовании следящей системы в качестве блока 12.фильтр должен быть настроен на частоту генератора 7, так как в следящей системе курса фильтр настроен на частоту генератора 5 воз буж- денияо
В качестве элементов 9 и 10 сравнения в этом случае могут применяться СКВТ любого типа, роторами механически связанные с роторами СКВТприемников блоков 11 и 12, статор- ными обмотками электрически соединенные со статорными обмотками со- ответствзпощих выходных СКВТ тангажа и крена гировертикали (указателя 8 вертикали) и статорами закрепленные так, что с роторных обмоток можно снять напряжения, пропорциональные синусной и косинусной составляющим углов V и V соответственно на частоте напряжения U,, питаемого роторными обмотками выходных СКВТ гировертикали „
При указанной реализации блоков 9-12 преобразователи координат можно реализовать на базе следящей системы, аналогичной следящей системе курса прототипа, с перестройкой фильтра на частоту напряжения U, воспроизводящей разворотом ротора СКВТ-приемника угол V( х в блоке 17) и имеющей на оси вращения двигателя дополнительный СКВТ, работающий в режиме преобразователя координат „Статорные обмотки СКВТ-приемника связаны при этом с роторными об- мотками соответствующего сравнивающего элемента (9 или 10)о
Регистрирующий прибор и масщта- бирующие элементы могут быть любого типа (не показаны)„
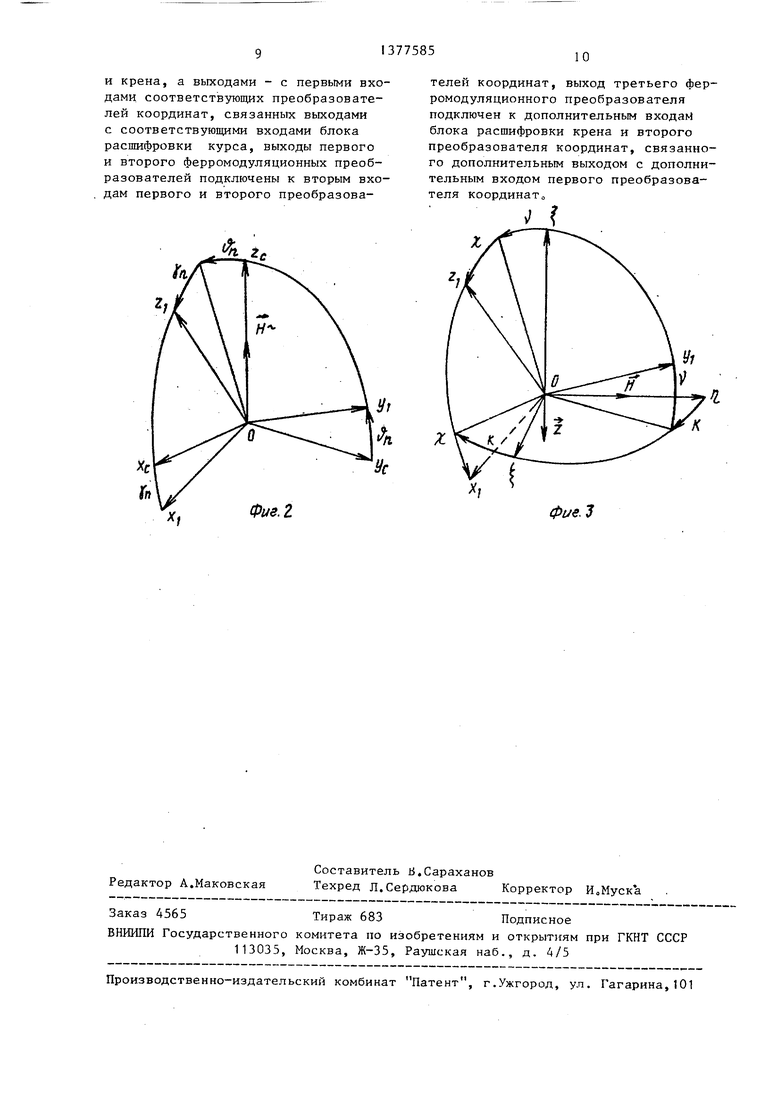
Работа устройства отражена на фиг.2,3 о
На фиг о 2 изображен общий случай/ ориентации осей чувствительности ФМП 2,3 и 4 относительно осей, связанных с объектом При этом изображенная система координат связана с объектом, а - с осями чувствительности Ф МП, Оси ОХ, OYj4 и OZ „параллельны соответственно поперечной, продольной и нормальной осям объекта о Оси ОХ , OY, и OZ совпадают с осями чувствительности ФМП 3,2 и 4 соответственно,Углы 1, и 11 есть углы приборных значений тангажа и крена при разворотах объекта относительно площадки маятника С|ФМП. Вектор напряженности Н соленоида 6, закрепленного по нормальной оси объекта, проектируется на оси чувствительности ФЖ1 3,2 и 4 в виде составляющих:
Т7, - tJ sinji ; Т Н Т Н , .
(1)
Очевидно, что при отсутствии возмущающих воздействий на площадку с ФМП оси чувствительности ФМП 2 и 3 будут лежать в плоскости горизонта, а утлы t и -vt будут соответствовать истинным углам тангажа (j) и крена (у объекта.
При отклонениях площадки маятника от плоскости горизонта, вызванных изменениями скорости движения объекта, приборные значения углов (Л и и будут отличаться от истинных на величину отклонения соответствующей
оси чувствительности ФМП 2 или 3 от плоскости горизонта.
Обозначим разность между приборными и истинными значения т углов тангажа и крена как
Л- сД О
(2)
Уп- Т . °
Чертеж (фигоЗ) отражает общий случай ориентации осей чувствитель- ности ФМП 2,3 и 4 относительно земной системы координат , у кото-, рой ось 0ч лежит в плоскости магнитного меридиана и направлена на магнитный северный полюс, а ось 0 - вертикальна. Система координат , связана с осями чувствительности ФМП 2,3 и 4 оговоренным вы- ще способом
Угол К есть угол магнитного курса, а углы V и X - углы отклонения площадки с ФМП от плоскости горизонта.
Вектор Т напряженности магнитного поля Земли изображен на фиг,3 составляющими; горизонтальной Н и вер- тикальной Z
Согласно кинематическому чертежу (фиГоЗ) измеряемые проекции вектора Т ШП 2,3, и 4 можно представить в виде
45
Tj Н(- sin К cos X - cos к sinx sin V ) + Z oosVsinx;
Т
Y1
H cos К cos -J - Z siny;
-21 К sinx-
- cosKcosjrsin л) ) - Z cosVcosX,
(3)
Следовательно, в сигнальных об- мотках ФМП 2,3, и 4 будут наводиться ЭДС, пропорциональные проекциям Т)(., J Т Y, и Т 2т на удвоенной частоте возбуждения, и ЭДС,пропорциональные проекциям Ту,, TYI и Т на
частоте генератора опорного поля„ ЭДС с сигнальной обмотки ФМП 2 (фиГоО поступает на бдок 11 расшифровки тангажа, где согласно второму уравнению системы (1) вычисляется Приборное значение угла тангажа () а затем поступает на один из входов элемента 9 сравнения. Имея на другом входе информацию о элемент 9 сравнения обеспечивает на выходе сигнал, пропорциональный , согласно первому уравнению системы (2),
ЭДС с сигнальных обмоток ФМП 3 и 4 поступает на вход блока 12 расшифровки крена, где согласно первому и третьему уравнениям системы (1) вычисляется приборное значение угла крена (l) Это значение поступает на вход элемента 10 сравнения, в котором благодаря наличию связи с указателем 8 вертикали согласно второму уравнению системы (2),вырабатывается сигнал, пропорциональный ж
Рассмотрим работу преобразователей 17 и 14 координато
При поступлении на входы 19 и 20 сигналов с ФМП 3 и 4, а на вход 18 сигнала, пропорционального у, , на выходах 16 и 23 будут вырабатываться сигналы, пропорциональные соответственно
и, Т cosr- Т ., sinK;
() Uj T,sin X: -
Zl
XI
Сигнал Ui поступает на вход 16 преобразователя 14 координато Так как на входы 13 и 15 поступают сигналы, пропорциональные л) и Ту,, то сигнал .на выходе 22 преобразователя 14 координат можно записать в виде
и О - DI sinV
TV.cos V - T-.cosxsinV - (5)
4iV -TV sinVsinii,
Подставляя в равенство.(5) значения для Т;(, , Ту, и Т, получим
Uj HcosK.
(6)
Сигнал на выходе 23 преобразователя 1 7 координат (U,.) с учетом значений для Т jf и Т, из выражения (З) можно представить как
и 1 -HsinK
(7)
Сигналы и и Uj поступают на входы блока 21 рмсшифровки курса, на
.выходе которого получаем сигнал о магнитном курсе, объекта. Причем измеренная величина зтого сигнала не зависит от влияния вертикальной сос- тавляюп1ей Z магнитного поля Земли. Составляющие Т,, Т, Т, завися- щие от фильтруются в блоке расшифровки курса, как; в свою очередьi в блоках 11 и 12 фильтрзпотся составляющие Тх1, TY, , TZIO
В предлагаемом устройстве решена одна из важных проблем - устранение погрешности определения курса из-за
5 отклонения осей чзшствительности ФМП от плоскости горизонта, вызванного переменным поступательным движе- нием объекта, и из-за действия вертикальной составляющей магнитного поля
0 Земли
Формула изобретения
Ус.тройство для определения азиму- 5 та, содержащее первый и второй фер- ромодуляционные преобразователи с взаимно перпендикулярными осями чувствительности, жестко закрепленные на двухосном маятнике, соленоид,же- 0 стко связанный с корпусом и соединенный с генератором опорного поля,генератор возбуждения, соединенный с входами первого и второго ферромоду- ляционных преобразователей, выхода- 5 ми связанных соответственно с блоком расшифровки тангажа и блоком расшиф- ровки крена, и блок расшифровки курса,о тли ч ающе е с я тем, что, с целью повьш1ения точности за 0 счет уменьшения влияния ошибок,обусловленных негоризонтальностыб осей чувствительности ферромодуляцИонных преобразователей и действием вертикальной составляющей магнитного по- 45 ля Земли, оно снабжено третьим фер- ромодуляционным преобразователем, ось чувствительности которого расположена перпендикулярно осям чувствительности первого и второго ферро- 50 модуляционных преобразователей,жестко закрепленным на маятнике и подключенным входом к генератору возбуждения, двумя элементами сравнения,первым и вторым преобразователями коор- 55 динат и датчиком вертикали, выходы которого подключены к первым входам элементов сравнения, вторыми входами соединенных с выходами блоков расшифровки соответственно тангажа
и крена, а выходами - с первыми входами соответствующих преобразователей координат, связанных выходами с соответствующими входами блока расшифровки курса, выходы первого и второго ферромодуляционных преобразователей подключены к вторым входам первого и второго преобразоваffl.
Фие.2
телей координат, выход третьего фер- ромодуляционного преобразователя подключен к дополнительным входай блока расшифровки крена и второго преобразователя координат, связанного дополнительным выходом с дополнительным входом первого преобразователя координат
фие. З
