ее первой производной н сигнал с выхода безынерционного звена 4 или 5 через блок инверторов 7 в зависимости от состояния коммутационного элемента 3, причем эти сигналы подаются с соответствующими весовыми коэффициентами. Блок 2 изменения структуры на основе информации о знаках сигнала ошибки и функции переключения с ; помощью коммутационного элемента изменяет структуру системы, изменяя тем самым выходное воздействие по сигналу ошибки, получаемое на выходе сумматора 6.
Предмет изобретения
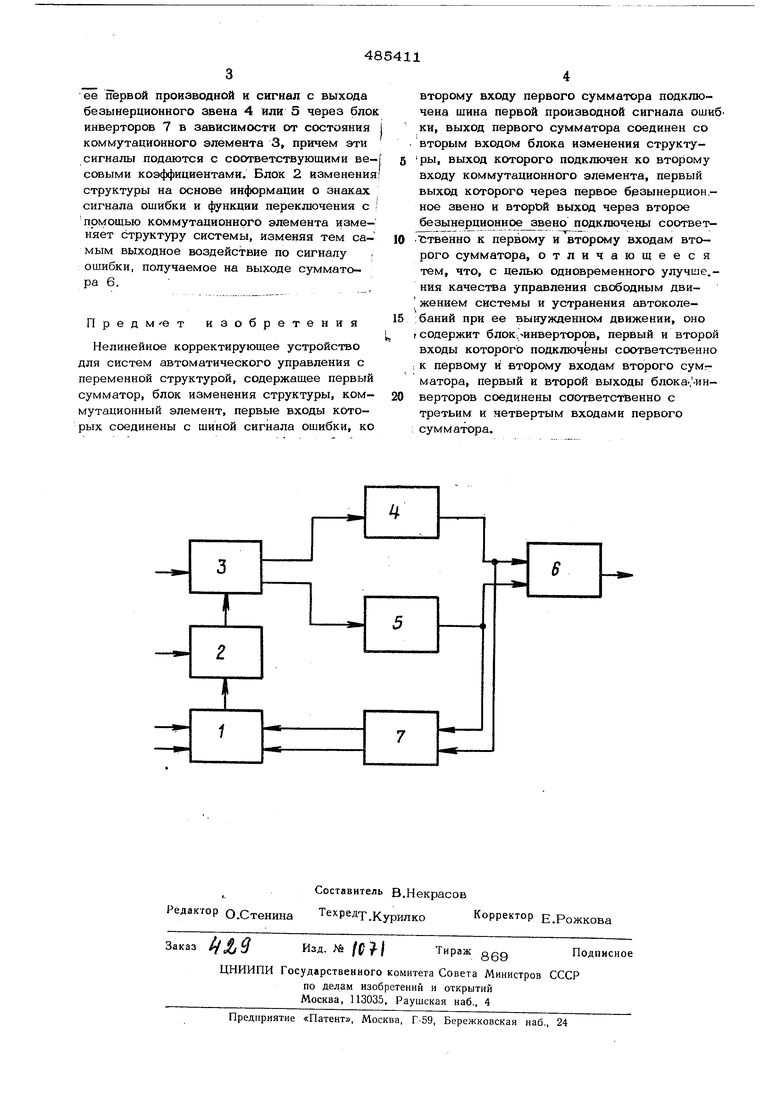
Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой, содержащее первый сумматор, блок изменения структуры, коммутационный элемент, первые входы которых соединены с шиной сигнала ошибки, ко
второму входу первого сумматора подключена шина первой производной сигнала ошибки, выход первого сумматора соединен со вторым входом блока изменения структуры, выход которого подключен ко второму входу коммутационного элемента, первый выход которого через первое бэзынерцион.ное звено и второй выход через второе безынерционное звенр 11одключены соотве- в нно к первому которому входам второго сумматора, отличающееся тем, что, с целью одновременного улучше.ния качества управления свободным движением системы и устранения автоколебаний при ее вынужденном движении, оно , содержит блок,-инверторе, первый и второй входы которого подключены соответственно ; к первому и второму входам второго сумг матора, первый и второй выходы блока-.-инвертороБ соединены соответственно с
третьим и четвертым входами первого : сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1978 |
|
SU742874A1 |
| Устройство автоматического управления положением разгрузочного конвейера горной машины | 1980 |
|
SU898059A1 |
| Умножитель электрических сигналов | 1982 |
|
SU1030813A1 |
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1976 |
|
SU584284A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Устройство для максимальной токовой защиты электропривода постоянного тока | 1984 |
|
SU1259391A1 |
| Устройство улучшения коммутации коллекторных электрических машин постоянного тока | 1984 |
|
SU1192047A1 |
| Электропривод | 1986 |
|
SU1365336A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| ЦИФРОВОЙ РЕГУЛЯТОР ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2009 |
|
RU2417390C2 |
