ное воздействие по сигналу ошибки, получаемое на выходе второго сумматора 6.
Функция переключения формируется как линейная комбинация сигналов ошибки, ее первой производной и сигнала с выхода одного из безынерционных звеньев в зависимости от состояния первого коммутатора 3. Эти сигналы берутся с определенными весовыми коэффициентами, которые изменяются при отсутствии и наличии в системе скользяш,его режима. Работа второго коммутатора 7 заключается в том, что он распознает наличие в системе скользяш,его режима или его отсутствие. Это он делает на основе анализа сигнала функции переключения, который в скользяш,ем режиме является высокочастотным. Частота переключения зависит только от характеристик блока 2 изменения структуры и первого коммутатора 3 и может достигать больших значений. Исполнительные цепи второго коммутатора 7 при наличии высокочастотного режима находятся в одном устойчивом состоянии, а при его .отсутстВИИ - в другом.
Таким образом, при сушествовании в системе скользящего режима второй коммутатор 7 дополнительно к первому 1 и второму 6 сумматорам подключает одни значения сигнала ошибки и ее производной, а при его отсутствии - другие значения, изменяя частотные характеристики корректирующего устройства в целом и фазовые соотношения функции переключения. Фазовые соотношения функции переключения изменяются так, чтобы в системе всегда существовал скользящий режим.
Способность системы к восстановлению скользящего режима в случае его срыва позволяет повышать ее точность и быстродействие, так как не требует больщого веса производной в функции переключения при изменяющихся параметрах системы управления. Введение второго коммутатора выгодно отличает описываемое устройство от известных, так как позволяет изменять фазовое опережение н коэффициент передачи корректирующего устройства при наличии в системе
скользящего режима и его отсутствии. Такое изменение приводит к повыщению быстродействия системы и ее точности. Одновременно этот блок позволяет восстанавливать в системе с изменяющимися параметрами скользящий режим в случае его срыва.
Формула изобретения
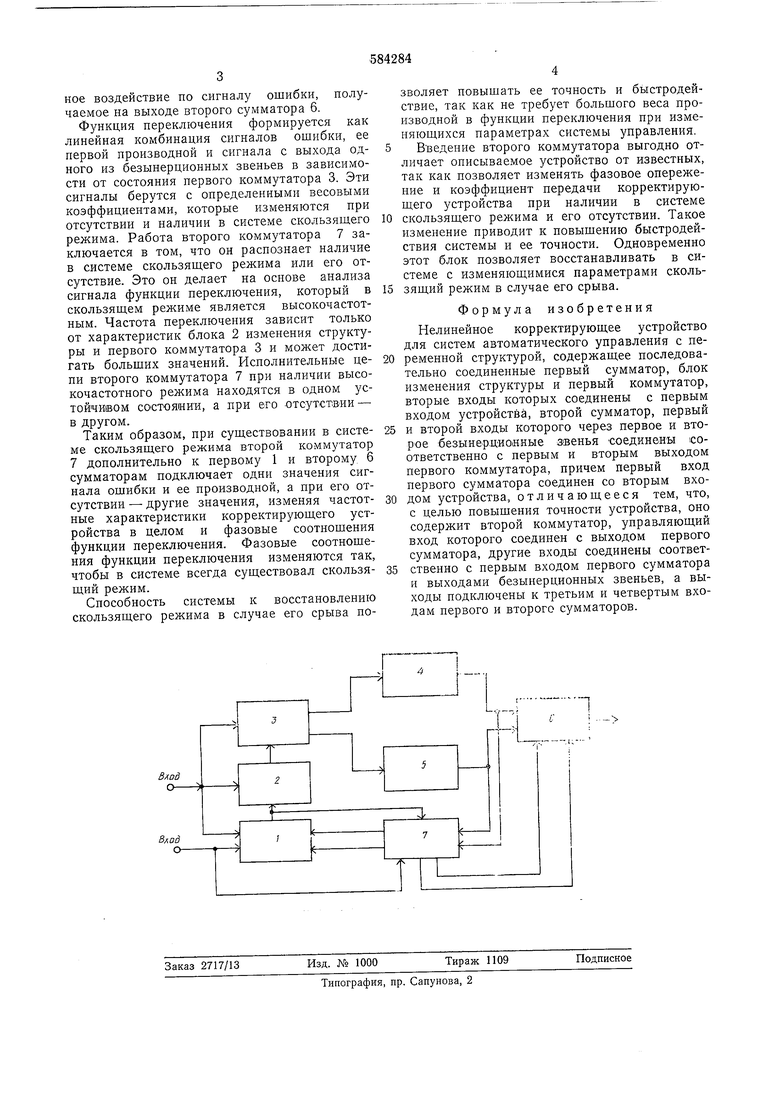
Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой, содержащее последовательно соединенные первый сумматор, блок изменения структуры и первый коммутатор, вторые входы которых соединены с первым входом устройства, второй сумматор, первый
и второй входы которого через первое и второе безынердионные звенья Соединены соответственно с первым и вторым выходом первого коммутатора, причем первый вход первого сумматора соединен со вторым входом устройства, отличающееся тем, что, с целью повыщения точности устройства, оно содержит второй коммутатор, управляющий вход которого соединен с выходом первого сумматора, другие входы соединены соответственно с первым входом первого сумматора и выходами безынерционных звеньев, а выходы подключены к третьим и четвертым входам первого и второго сумматоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1978 |
|
SU742874A1 |
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1979 |
|
SU943641A2 |
| Система управления | 1979 |
|
SU842703A1 |
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1974 |
|
SU485411A1 |
| Следящая система | 1980 |
|
SU938251A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| СПОСОЬ РЕГУЛИРОВАНИЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ, ОПИСЫВАЕМЫХ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИп-ого ПОРЯДКА | 1969 |
|
SU239405A1 |
| Способ управления вытягиванием волокон при формовании и устройство для его осуществления | 1989 |
|
SU1686047A1 |
| Корректирующее устройство | 1982 |
|
SU1236417A1 |
