1
Изобретение относится к системам автоматического управления с переменной структурой.
Известны нелинейные корректирующие устройства с переменной структурой, содержащие блок изменения структуры, коммутатор, первый и второй сумматоры, безынерционные звенья, блок инверторов, позволяющие улучщить качество свободного движения системы и устранить автоколебания при ее вынужденном движении 1.
Наиболее близким к предлагаемому по технической сущности является нелинейное корректирующее устройство для систем автоматического управления с переменной структурой 2, содержащее последовательно соединенные первый сумматор, блок изменения структуры, первый коммутатор, первое безынерционное звено, второй коммутатор и второй сумматор, а также второе безынерционное звено, вход которого соединен с вторым выходом первого коммутатора, а выход - с вторыми входами второго сумматора и второго коммутатора, причем третий вход второго коммутатора соединен с первым входом первого- сумматора, четвертый вход - с выходом первого сумматора, второй выход - с вторым входом второго сумматора, третий выход - с вторым входом, а четвертый выход - с третьим входом первого сумматора, вторые входы первого сумматора, блока изменения 5 структуры и первого коммутатора соединены с первым входом устройства.
Такое устройство позволяет изменять характеристики закона управления в процессе регулирования, что дает возможность восстанавливать в системе скользящий режим. Наличие скользящего режима позволяет устранить автоколебания при вынужденном движении системы.
Однако в процессе регулирования существенно не уменьщается медленно меняющаяся составляющая сигнала ощибки, что
15 не дает возможность получить в системе максимальную точность.
Целью предлагаемого изобретения является повыщение точности системы.
Это достигается тем, что устройство дополнительно содержит последовательно соединенные низкочастотный фильтр, интегратор и нелинейный элемент с зоной нечувствительности, второй вход которого соединен с выходом второго сумматора, а вход
низкочастотного фильтра соединен с вторым входом первого сумматора.
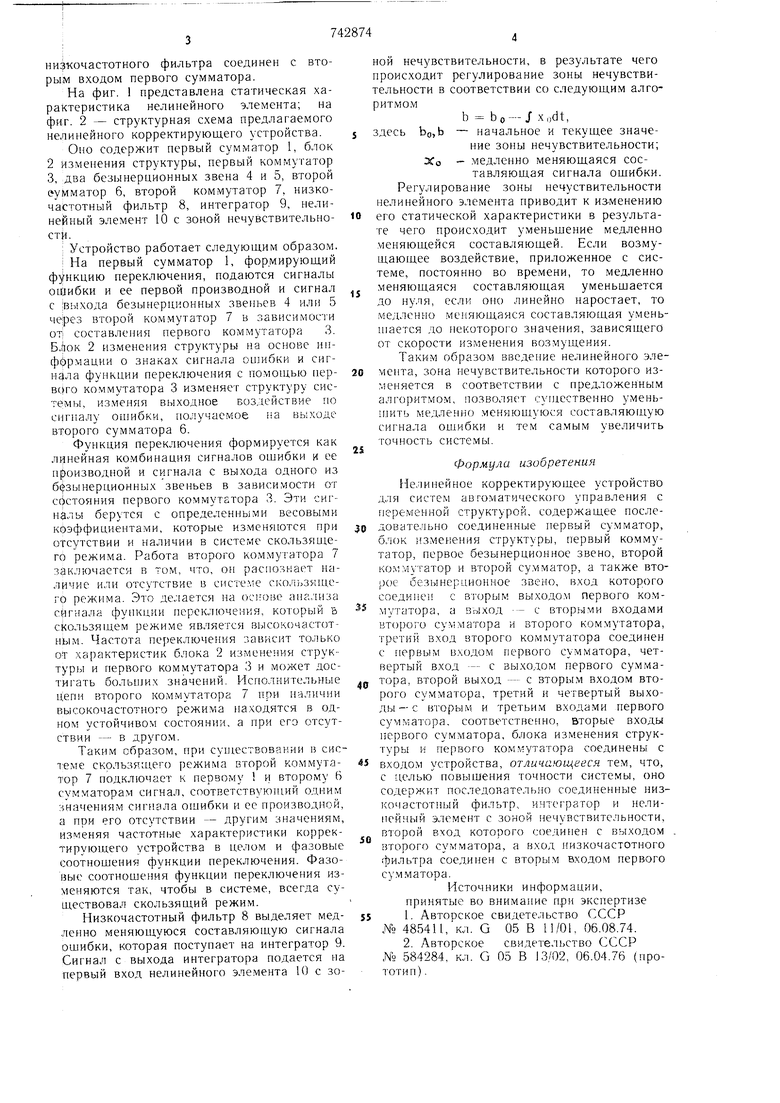
На фиг. 1 представлена статическая характеристика нелинейного элемента; на фиг. 2 - структурная схема предлагаемого нелинейного корректирующего устройства.
Оно содержит первый сумматор 1, блок 2 изменения структуры, первый коммутатор 3, два безынерционных звена 4 и 5, второй оумматор 6, второй коммутатор 7, низкочастотный фильтр 8, интегратор 9, нелинейный элемент 10 с зоной нечувствительности.
; Устройство работает следующим образом. На первый сумматор 1, формирующий функцию переключения, подаются сигналы ошибки и ее первой производной и сигнал с выхода безынерционных звеньев 4 или 5 через второй коммутатор 7 в зависимости от составления первого коммутатора 3. Б.йок 2 изменения структуры на основе информации о знаках сигнала опзибки и сигнала функции переключения с помощью первого коммутатора 3 изменяет структуру системы, изменяя выходное воздействие по сигналу ошибки, получаемое iia выходе второго сумматора 6.
Функция переключения формируется как линейная ко.мбинация сигналов ошибки и ее производной и сигнала с выхода одного из б(|зынерционных звеньев в зависимости от состояния первого коммутатора 3. Эти сигналы берутся с определенными весовыми коэффициентами, которые изменяются при отсутствии и наличии в системе скользяnieго режима. Работа второго ко.ммутатора 7 заключается в том, что, он распознает наличие или отсутствие в системе скользящего режима. Это делается на oci-oue анализа сигнала переключения, который ь скользящем режиме является высокочастот ным. Частота переключения зависит только от характеристик блока 2 изменения структуры и первого коммутатора 3 и может дости1ать больших значений. ИсполнительнЕле цепи второго коммутатора 7 при наличии высокочастотного режима находятся в одном устойчивом состоянии, а при его отсутствии - в другом.
Таким образом, при сушествовании в системе скользящего режима второй коммутатор 7 подключает к первому 1 и второму 6 сумматорам сигнал, соответствующий о.аним значениям сигнала ошибки и ее производной, а при его отсутствии - другим значениям, изменяя частотные характеристики корректирующего устройства в целом и фазовые соотношения функции переключения. Фазовые соотношения функции переключения изменяются так, чтобы в системе, всегда существовал скользящий режим.
Низкочастотный фильтр 8 выделяет мед.ленно меняюнхуюся составляющую сигнала ошибки, которая поступает на интегратор 9. Сигнал с выхода интегратора подается на первый вход нелинейного эле.мента 10 с зоной нечувствительности, в результате чего происходит регулирование зоны нечувствительности в соответствии со следующим алгоритмом
b Ьо - S Xodt,
здесь bo,b - начальное и текущее значение зоны нечувствительности; УО медленно меняющаяся составляющая сигнала ощибки. Регулирование зоны нечуствительности нелинейного элемента приводит к из-менению его статической характеристики в результате чего происходит уменьщение медленно меняющейся составляющей. Если возмущающее воздействие, приложенное с системе, постоянно во времени, то .медленно меняющаяся составляющая уменьшается лЗд нуля, если оно линейно наростает, то медленно меняющаяся составляющая уменьшается до некоторого значения, зависящего от скорости изменения возмущения.
Таким образом введение нелинейного элемента, зона нечувствительности которого изменяется в соответствии с предложенным алгоритмо.м, позволяет существенно уменьи 1ить медленно меняющуюся составляющую сигнала ошибки и тем са.мым увеличить
точность системы. S
Формула изобретения
Нелинейное корректирующее устройетво для систем автоматического управления с переменной структурой, содержащее последовательно соединенные первый сумматор, блок изменения структуры, первый коммутатор, первое безынерционное звено, второй коммутатор и второй су.мматор, а также второе безынерционное звено, вход которого соединен с вторым выходом первого коммутатора, а Вогход -- с вторыми входами второго сумматора и второго ком.мутатора, третий вход второго коммутатора соединен с первым входом первого сумматора, четвертый вход -- с выходом первого сумматора, второй выход -- с вторым входом второго сумматора, третий и четвертый выходы-с вторым и третьим входа.ми первого сумматора, соответственно, вторые входы первого сумматора, блока изменения структуры и первого ком.мутатора соединены с
входом устройства, отличающееся тем, что, с целью новыщения точности системы, оно содержит последовательно соединенные низкочастотный фильтр, интегратор и нелинейный элемент с зоной нечувствительности, второй вход которого соединен с выходом . второго сумматора, а вход низкочастотного фильтра соединен с вторым входом первого су.мматора.
Источники информации, принятые во внимание при экспертизе
51. Авторское свидетельство СССР
Яо 485411, кл. G 05 В 11/01, 06.08.74. 2. Авторское свидетельство СССР ,NO 584284, кл. G 05 В 13/02, 06.04.76 (прототип).
//
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1979 |
|
SU943641A2 |
| Нелинейное корректирующее устройство для систем автоматического управления с переменной структурой | 1976 |
|
SU584284A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Релейное управляющее устройство | 1977 |
|
SU622045A1 |

ue /
