ную. -Невозможность непрерывной работы горной машины, так как любые изменения ее положения приводят к необходимости прекращения транспорт ных операций для вывода разгрузочного конвейера в требуемое положение относительно транспортного сред ства. Этот недостаток приводит к большим затратам времени на выполнение вспомогательных операций. Невозможность автоматизации горного комплекса, в состав которого входит горная машина с разгрузочным конвейером. Высокая вероятность , столкновения раз.грузочного конвейера с горной выработкой при. выполнении маневровых операций, причем при каждом столкновении возникает авари ная ситуация, приводящая к поломкам разгрузочного конвейера. Известно также устройство для удержания разгрузочного конвейера горной машины над транспортным сред ством, включающим сложношарнирный узел для соединения разгрузочного конвейера с горной машиной и механизма поворота конвейера, состоящего из каретки, Контактирующей с тра спортным средством к тяги. Требуемо положение разгрузочного конвейера о носительно транспортного средства в этом устройстве достигается за счет механической связи указанных объектов между собой Г2. Однако данному устройству присущи следующие недостатки. Наличие ме ханической связи горной машины с транспортным средством ограничивает область рабочего пространства горной машины и препятствует выполнению маневров ее вне этой области ра бочего пространства. Как следствие, функциональные возможности горной машины снижаются. Механическая связ требует определенного объема монтаж ных работ, на которые тратится рабо чее время горной машины. Следовательно, удельный вес на выполнение вспомогательных операций в проходческом комплексе повышается. В целях исключения нетехнологических положений горной машины относительно .транспортного средства, когда выбраны все длины тяги, возни кает необходимость дополнительного контроля со стороны обслуживающего персонала предельных режимов работы известного устройства. Поэтому прак 4 тически в зоне сцепления тяги с транспортным средством находится один рабочий, выполняющий указанные функции. Управлять заданными перемещениями разгрузочного конвейера в выработке, отличающимися от жестко определенных связью положений разгрузочного конвейера, невозможно, т.е. программное управление положением разгрузочного конвейера невыполнимо. Доля мощности приводов ходовой части сорной машины расходуется на. Перемещение каретки, что затрудняет применение на горной машине устройств управления режимом работы последней, поэтому функциональные возможности горной машины снижаются. Цель изобретения - расширение функциональных возможностей горной машины за счет исключения механической связи ее с транспортным средством. Поставленная цель достигается тем, что устройство снабжено датчиком угла разворота разгрузочного конвейера, дальномером, двумя решающими блоками, масштабным преобразователем, схемой сравнения, логическим блоком, пороговым элементом, блоком управления ХОДОВОЙ частью машины и двумя каналами управления, каждый из которых включает последовательно соединенные двухвходовую схему совпадения и концевой выключатель, и последовательно соединенные широтно-импульсный модулятор, тиристорный ключ и электромагнит реверсивного гидрозолотника, причем выходы датчика угла разворота разгрузочного конвейера соединены соответственно через первый решающий блок с вычитающим входом схемы сравнения и через пороговый элемент с управляющими входами обоих решающих блоков, а выход дальномера через последовательно соединенные второй решающий блок и масштабный преобразователь подключен к суммирующему входу схемы сравнения, выход которой подключен ко входу логического блока, а выходы логического блока подключены в соответствующих каналах управления ко широтно-импульсных модуляторов и ко вторым входам схем совпадения, выходы которых подключены ко входам блока управления. Первый решающий блок выполнен в виде сумматоров, двух инверторов.
блока абсолютной величины и ключа, при этом первый и второй входы сумматора подключены соответственно к выходам первого инвертора и ключа, один из входов которого соединен с выходом второго инвертора, а выход сумматора подключен ко входу блока абсолютной,величины.
Второй решающий блок выполнен в виде сумматора, инвертора,,, двух ключей, двух безынерционных звеньев и нелинейного функционального звена, при этом входы сумматора подключены соответственно к выходам первого инвертора, первого и второго ключей, а выход сумматора подключен через второе безынерционное звено ко входу нелинейного функционального звена.
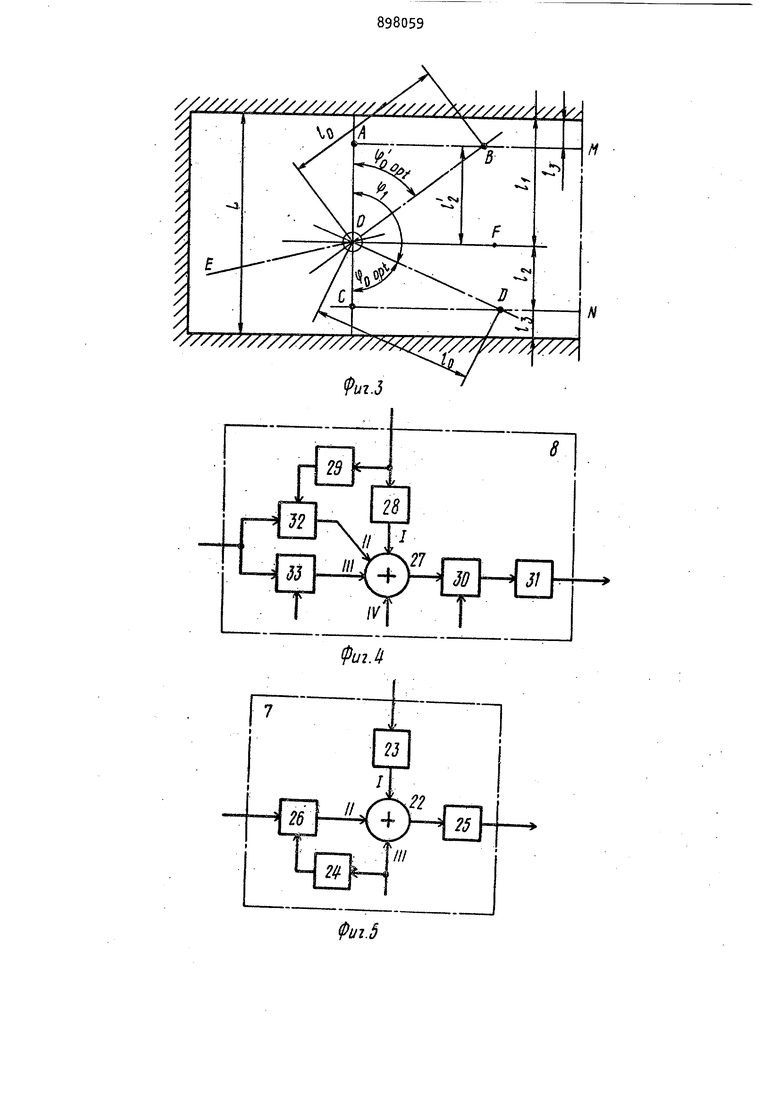
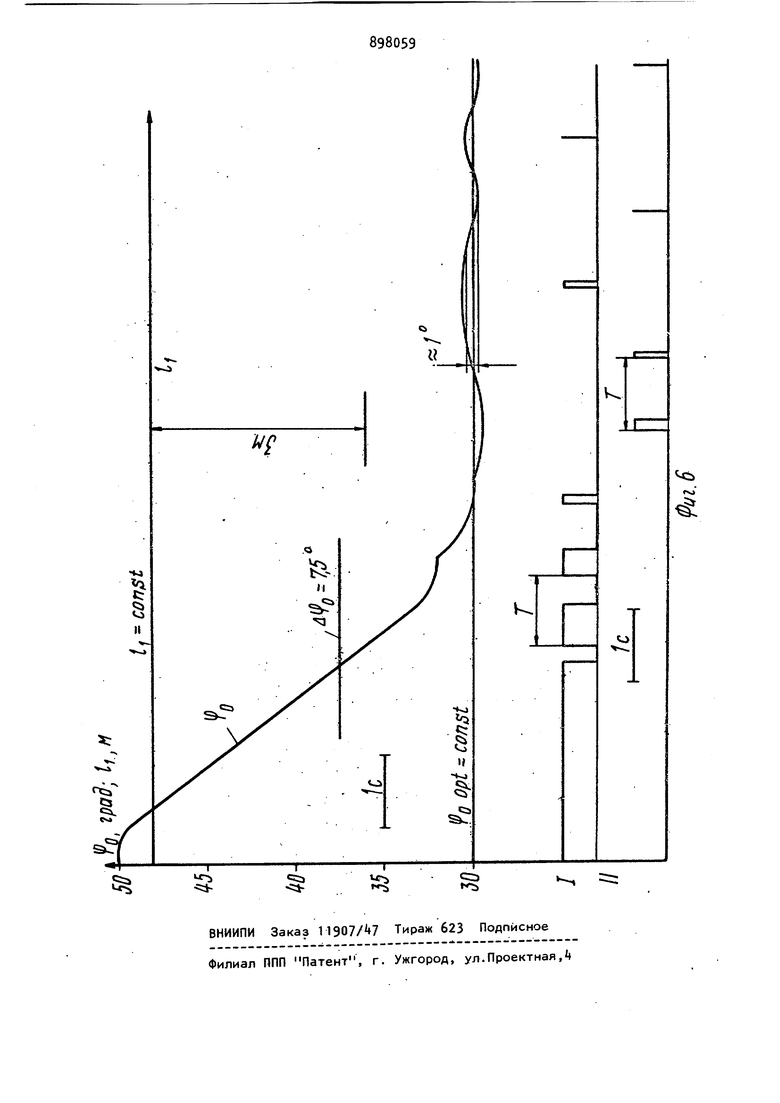
На фиг. 1 представлена функциональная схема устройства; на фиг.2 расположение оборудования проходчесг кого комплекса в горной выработке; на фиг. 3 - пояснение геометрической задачи, которая реализует предложенное устройство; на фиг. 4 и 5 реализации структур решающих блоков; на фиг.6 - осциллограмма и диаграмма, . работы устройства, полученные при лабораторных испытаниях его макета.
Устройство состоит из следующих функциональных блоков.. Разгрузочный конвейер 1 горной машины (-например, погрузочной машины с нагребными лапами) совместно с механизмом поворота конвейера связан с транспортным средством 2 (например магистральным конвейером непрерывного действия) по грузопотоку. Датчик 3 угла разворота разгрузочного конвейера и дальномер установлены по оси поворота разгрузочного конвейера 1 над его несущей поверхностью, а первый 5 и второй 6 концевые выключатели установлены на горной машине с правой и левойстороны и механически взаимодействуют с разгрузочным конвейером 1 при его предельных углах развОрота.
Информационные входы первого 7 и второго 8 решающих блоков подключены соответственно к выходам датчика 3 угла разворота разгрузочного конвейера и дальномера k, а управляющие входы этих блоков подключены к вы-ходу порогового элемента 9, в котором порог срабатывания определяется .углом разворота разгрузочного конвейера 1, равным 90 . Выход первого
980596
решающего блока 7 соединен непосредственно с отрицательным входом схемы сравненкя 10, а выход второго решающего блока 8 подключен через масшS табный преобразователь 11 на положительный вход схемы 10 сравнения,которая своим выходом соединена со входом логического блока 12.
Два идентичных канала управления О содержат первый 13 и второй 14 широтно-импульсный модуляторы, первый 15 и второй 1б тиристорные ключи, первый 17 и второй 18 электромагниты реверсивного гидрозолотника и 15 первую 19 и вторую 20 схемы совпадения , первые входы которых соединены с выходами соответствующих концевых выключателей 5 и 6, а вторые входы соединены с разнополярными выходами 20 логического блока 12. Выходы схем совпадения 19 и 20 подключены на входы блока 21 управления ходовой частью.
На фиг. 2 и 3 обозначены следующие геометрические параметры: io длина разгрузочного конвейера 1 горной машины; - расстояние от оси поворота (точка 0) разгрузочного конвейера 1 до левой боковой поверхности горной выработки, измеряемое дальномером 4,2- и г. соответственно расстояния от оси поворота разгрузочного конвейера 1 до осей.СМ и AM транспортного средства 2 при правой или левой технологических схемах транспортирования горной массы; Сдрасстояния от осей Ш и AM транспортного средства 2 до боковых поверхностей горной выработки ;L - полная ширина 40 горной выработки.Переход разгрузочного конвейера 1 через линию OF, проходящую через ось поворота (точка 0)раз.грузочного конвейера 1 параллельно боковым поверхностям горной выработки,определяют линии правой ОД или ле-; вой ОВ технологических схем транспортирования горной массы.
Линии СД и ОВ являются осью разгрузочного конвейера 1 и в соответствии со схемами транспортирования горной массы определяют требуемые положения разгрузочного конвейера 1 относительно транспортного средства 2, при которых грузопоток неразрывен, т.е. весь груз разгрузочного конвейера 1 поступает в транспортное средство 2. Ось поворота разгрузочного конвейера 1 (точка 0) и ось горной машины ОЕ в процессе работы ее меняют свои положения, которые зависят от технологии работы горной машины и ее маневровых операций. Требуемые угловые положения разгрузочного конвейера 1 относительно транспортного средства 2 определяются для правой и левой технологических схем транспортирования .горной массы оптимальными углами foQpi-и Poopt- Текущие значения углов (и «р в процессе управления положением разгрузочного конвейера 1 могут принимать не оптимальные (произвольные в рамках рас тояния L с учетом конструктивных ог раничений по предельным углам разворота разгрузочного конвейера 1 ) зна чения Чо и Чо , и задача данного устройства заключается в автоматичес кой их установке на оптимальные углы % .Угол f.y является допояйением угла Чо до 180. В процессе функционирования устройства датчик 3 угла разворота разгрузочного конвейера измеряет текущие значения углов f и (ро, Датчик конвейера 3 сов- местно с дальномером 4 представляет собой ультразвук-овое сканирующее из мерительное устройство. Переход к правой или левой схемам транспортирования горной массы региотрируется пороговым элементом 9, который на своем выходе формирует единичный сигнал при левой, и нулевой сигнал при правой технологических- схемах транспортирования горной массы. Вход порогового элемента 8 подключен на выход датчика 3 угла разворота разгрузочного конвейера, а заданный порог срабатывания его составляет 90, т.е. на выходе порогового элемента 9 формируется еди ничный сигнал при переходе разгрузочного Конвейера 1 от угла f для правой к углу TO для левой технологических схем транспортирования гор ной массы. Решающие блоки 8 и 7 (фиг. 4 и 5 имеют переменные структуры, определяемые правой или левой технологи™ ческими схемами транспортирования горной массы. Первый решающий блок 7 состоит из сумматора 22, инверторов 23 и 24, блока 25 абсолютной ве личины и ключа 26. Второй решающий блок 8 состоит из сумматора 27, инвертора 28, безынерционных звеньев 29 и 30, нелинейного функциональног звена 31, ключей 32 и 33- Коэффициенты передачи безынерционных звеньев 29 и 30 соответственно равны 2 и , Нелинейное функциональное звено 31 реализует функцию arccos входной величины и представляет собой набор диодно-резисторных схем. Ключи 26 и 32 - замыкающие, ключ 33 - размыкающий, управляющие входы ключей 26, 32 и 33 соединены с выходом порогового элемента 9. Сумматор 22 трехвходовой, а сумматор 27 - четырехвходовой. На магистральный вход ключа 33, на четвертый вход сумматора 27, на третий вход сумматора 22 и в безынерционное звено 30 подаются соответственно постоянные величины, пропорциональные L, , и 1/. Входы безынерционного звена 23 и инвертора 2Ь соединены с выходом дальномера 4, а вход инвертора 23 соединен с выходом датчика 3 угла разворота разгрузочного конвейера. Инверторы 23, 2 и 28, сумматоры 22 и 27, и безынерционные звенья 29 и 30 реализованы на операционных усилителях, а ключи 24, 2б и 33 на герконовых реле, Магистральные входы ключей 26 и 32 соединены соответственно с выходами инвертора 24 и безынерционного звена 29- На первый и второй входы сумматора 26 подключены выходы инвертора 23 и ключа 28, а на первый, второй и третий входы сумматора 27 подключены выходы инвертора 28, клю-г чей 32 и 33. Устройство работает следующим об разом. Решающий блок 8 по измеренному дальномером 4 расстоянию определяет требуемое (оптимальное в смысле поступления всего объема транспортируемой горной массы в транспортное средство 2) угловое положение разгрузо ного конвейера 1, равное при правой технологической схеме транспортирования горной .массы Чд-р агссо5 х L - 3 - т Т л 1 л J, и при левой технологической схеме ф ,. arccos ( oopt Величины, пропорциональные значениям L, 4/Рд, i) введены во второй решаюи ий блок 8 как коне г таиты. и t о opt полу чаны в результате решения треугольников OCD и ОАВ на фиг. 2 и 3. Первый решающий блок по измеренному значению углов tp и f о определяет текущие значения углов VoH г1ри правой или левой технологических схема транспортирования горной массы, рав ные ф f-f и 9о 4 . При переводе разгрузочного конвейера 1, который осуществляется ручным управлением машинистом в процессе под готовительных операций, с правой в левую технологическую схему транспортирования горной массы выходной сигнал порогового элемента 9 достигает величины порога срабатывания равного ЭО угла разворота разгрузочного конвейера 1. При этом пороговый элемент 9 срабатывает и на его выходе формируется единичный сигнал, подаваемый на управляющие входы решающих блоков 7 и 8.-В этих блоках автоматически изменяется структура, т.е. изменяется алгоритм решения функций с Voorrt о Чоор и , вычисленных в первом решающем блоке 7, т.е. выполняет функ .ции согласования масштабных единиц. Величина, поступающая с выхода масш табного, преобразователя 11 на положительный вход схемы сравнения 10 для устройства управления является задающим воздействием, которое изменяется с изменением положения гор ной машины (растояние ) в рабочем пространстве, а величина, поступающая с выхода первого решающего блока 7 на отрицательный вход схемы 10 сравнения, выполняет функции отрицательной обратной связи по требуемому положению разгрузочного .конвейера 1 относительного транспортного средства 2. При отклонении разгрузочного конвейера 1 в правую (или левую) сторону от требуемого положения ошибка управления, снимаемая с выхода схемы 10 сравнения, принимает отрицательное (или положительное) значение, которое на разнополярных выходах логического блока 12 выделяется в соответств.ии с ее знаком. Знак ошибки управления определяет работу первого или второго каналов управления, а ее величина определяет длительность (ширину) импульсов, генерируемых на выходах первого 13 или второго 14 широтно-импульсных модуляторов, частота коммутации которых равна 1,0 Гц. При нулевой ошибке уп59равления, когда достигается требуемое оптимальное положение разгрузочного конвейера 1 относительно транспортного средства 2, на выходах обоих широтно-импульсных модуляторов 13 и 14 сигнал равен нулю. Выходной сигнал первого 13 или второго 14 широтно-импульсных модуляторов соответственно подается на первый 15 или второй 16 тиристорные ключи, которые включают переменное напряжение с частотой 50 Гц на первый 17 или второй 18 электромагниты реверсивного гидрозолотника. Так как широтно-импульсные модуляторы 13 и 14 позволяют получать коэффициент заполнения, равный 1, то при больших отклонениях резгрузочного конвейера 1 относительно транспортного средства 2 ре версивный гидрозолотник непрерывно включен. При нулевых отклонениях электромагниты 17 и 18 отключены и поэтому реверсивный гидрозолотник находится в нейтральном положении под действием возвратных пружин. Реверсивный гидрозолотник, гидравлически соединенный с гидроцилиндрами поворота разгрузочного- конвейера 1, переключает поток масла в них и последние производят разворот разгрузочного конвейера 1 до требуемого положения. Таким образом, чем больше величина углового отклонения разгрузочного конвейера 1 от требуемого положения, вычисляемого вторым решающи блоком 8, тем больше длительность включения реверсивного гидрозолотника в соответствующую сторону выхода разгрузочного конвейера 1 на требуемое положение, а следователь- ; но,и больше средняя скорость исправления самого отклонения. В процессе выхода разгрузочного конвейера 1 на требуемое положение средняя скорость его движения плавно уменьшается до нуля, так как сигнал отрицательной обратной связи, снимаемый с выхода первого решающего блока 7 компенсирует на схеме сравнения 10 задающее воздействие, снимаемое с масштабного преобразователя 11. Этим достигается форсированный, но плавный процесс управления заданным положением разгрузочного конвейера 1. Изменения положения горной машины в ыработке, диктуемые технологическим роцессом ее работы, приводят к появлению отклонения разгрузочного кон вейера 1 от требуемого положения и его дальнейшую форсированную компен сацию в соответствии с автоматимеским вычислением и формированием зада ющего воздействия во втором решающем блоке 8 и Масштабном преобразователе 11. Требуемое-угловое положение разгрузочного конвейера 1 при необходимости можно изменять по заданной программе в процессе работы горной машины изменением во втором решающе блоке 8 величины, пропорциональной сJ. Разгрузочный конвейер 1 отслеживает эту программу, выполняя требуемый маневр в рамках расстояния.L Такое применение устройства расширяет функциональные возможности горной машины, характерные для манипуляционных движений машин-роботов. На функционирование устройства наложены ограничения, являющиеся следствием возникновения нетехнологических расположений горной машины в выработке, при которых угол разворота разгрузочного конвейера 1 достигает предельно-конструктивного значения, а его пол9жение не соответствует требуемому по оптимальной передаче горной массы в транспортно средство 2. В устройстве при подход к таким режимам на йторых входах первой 19 или второй 20 схем совпадения присутствует ошибка управлени снимаемая с одного из выходов логического блока 12, а на первых входа одной из схем совпадения или 19 или 20 появляется единичный сигнал,поступающий от включения соотвеiствующего первого 5 или второго 6 концевых выключателей. Поэтому или перва 19 или вторая 20 схемы совпадения включаются и подают на один из входов блока управления ходовой частью машины 21 единичный сигнал, приводя щий к автоматическому включению ходовой части машины, в направлении изменений ее расположения в,выработ ке до требуемого. Одновременно опер тору подается световой сигнал о при лижающемся нетехнологичном расположении горной машины в выработке с указанием правой или левой сторон положения разгрузочного конвейера . Решающие блоки 7 и 8 (фиг. t и 5 работают следующим образом. При правой технологической схеме транспортирования горной массы в первом решающем блоке 7 ключ 26 разомкнут, а на вход инвертора 23 поступает величина, пропорциональная углу которая инвертируется в нем и подается на первый вход первого сумматора 22. На третий вход этого сумматора 22 поступает величина, пропорциональная Результат вычитания, снимаемый с выхода первого сумматора 22, пропускается блоком абсолютной величины 25 на вход масштабного преобразователя 11. При левой технологической схеме транспортирования горной массы подается единичный сигнал на управляющий вход ключа 2б и он замыкается, пропуская через свой магистральный вход на второй вход сумматора 22 величину, пропорциональную 180. Значения сигналов, поданных на второй и третий входы сумматора 22, компенсируют друг друга, поэтому отрицательный сигнал, пропорциональный величине , проходя через сумматор 22, в блоке абсолютной величины 25 выделяется с положительными знаком. Во втором решающем блоке 8 при правой технологической схеме транспортирования горной массы ключ 32 разомкнут, ключ 33 замкнут, на первый вход сумматора 27 через инвертор 28 подается величина, пропорциональная отрицательному -значению расстояния L , и на чертвертый вход этого сумматора подается величина, пропорциональная отрицательному значению расстояния з- Через магистральный вход ключа 33 на третий вход сумматора 27 подается величина, пропорцио нальная расстоянию f,. Результат суммирования входных сигналов сумматором 27 в безынерционном звене 30 умножается на постоянную величину, пропорциональную I/to. Нелинейный функциональный блок 31 по выходному сигналу безынерционного звена 30 в соответствии с заданной нелинейностью arccos угла, не превышающего значения 90 , формирует на своем выходе сигнал, пропорциональный углу f ,. При левой технологической схеме транспортирования горной массы на управляющие вхоДы ключей 32 и 33 подается единичный сигнал коммутации, приводящий к их переключению, поэтому на второй вход сумматора 27 через первое безынерционное звено 29 и магистральный вход второго ключа 32 поступает величина, пропорционал ная расстоянию 2 t ,а на третьем входе второго сумматора 27 присутст вует нуль. Результат суммирования входных сигналов второго сумматора 27 пропорциональный величине Е i,. Далее, аналогично предыдущему,посредством последовательных преобразо ваний сигналов во втором безынерционном звене 30 и нелинейном функциональном блоке 31 на выходе последнего формируется величина, пропорциональная углу «fjj jjp, Аналоговые элементы решающих бло ков 7 и 8 реализованы на операционных усилителях и диодно-резисторных схемах. Таким образом, применение предлагаемого устройства исключает механическую связь горной машины с транспортным средством 2, а также исключает все виды монтажных работ при больших маневрах горной машины (в частности погрузочной) , необходимых для выполнения взрывов в забое горной выработки, этим уменьшается удельный вес времени на выполнение вспомогательных и подготовительных операций, а затраты труда обслуживаю щего персонала на подготовку проход ческого комплекса к работе становят ся минимальны. Кроме того, применение устройства на горной машине исклйчает одного рабочего, непрерывно контролирующего предельные положения как горной машины, так и механической связи на транспортном средстве. При применении датчика угла разворота разгрузочного конвейера 3 в виде ультразвуковой сканирующей системы угловая минимальная точность выхо да .на требуемое (оптимальное) положение разгрузочного конвейера 1 применительно к реальной машине не превышает -i: 2,0, а линейная минимальная точность не превышает 13м, причем средняя скорость выхода рагрузоч ного конвейера 1 к требуемому положению изменяется почти по апериодичё ко.му закону до отклонения составляющего порядка 35 см. Далее процесс передвижения разгрузочного конвейера 1 обеспечивается дискретно, в соответствии с работой широ.тно-импульсных модуляторов 13 или 14, до компенсации отклонения. Минимальная ТОЧНОСТЬ, равная 13 см, для технологического процесса транспортирования горной массы погрузочной машиной по технологическим требованиям вполне допустима, она при исследовании устройства зарегистрирована в 9,5 случаев. Средняя линейная точность выхода разгрузочного конвейера 1 на требуемое положение составляет при пересчете на реальный объект 8 см при объеме испытаний 350 циклов. Среднее быстродействие выхода разгрузочного конвейера 1 при применении устройства на погрузочной машине 2ПНБ-2 от максимально задаваемого отклонения, равного 1,5 м до отклонения,равного 35 см, составляет 2,5 3 с, а подход разгрузочного конвейера 1 на требуемое в рамках полученной средней точности составляет 22,5 с, т.е. за 3 цикла работы широтно-импульсного модулятора. Для погрузочной машины, оснащенной системой управления режимом работы с регулируемым приводом ходовой части, максимальной рабочей скоростью подачи, равной k м/мин, указанное быстродействие управления положением разгрузочного конвейера 1 вполне допустимо. На осцилоограмме и диаграмме полученых при испытании макета разгрузочного конвейера (фиг. t), обозначено: - текущее значение угла разворота макета, измеряемое датчиком угла разворота 3 относительно требуемого (оптимального)углового положения HO opt Л Фо угловая ошибка, при которой проявляется дискретный процесс перемещения консоли макета, являющийся следствием дискретной работы широтно-импульсных модуляторов 13 или 14, с периодом коммутации их задающих генераторов Т, соответствующим частоте 1,0 Гц. ; Расчетный ожидаемый экономический эффект от применения устройства по сравнению с известным по погрузочной машине 2ПНБ-2 составляет приблизительно 75бО руб. в год на один объект. Формула изобретения 1. Устройство автоматического управления положением разгрузочного конвейера горной машины относительно транспортного средства, например непрерывного действия, включающее мехакизм .поворота конвейера, отличающееся тем, что, с целью расширения функциональных возможностей горной машины за счет исключения механических связей ее с транспортным средством, оно снабжено датчиком угла разворота разгрузочного конвейера, дальномером, двумя решающими блоками, масштабным преобразователем, схемой сравнения, логическим блоком, пороговым элементом, блоком управления ходовой частью машины и двумя каналами управления, каждый из которых включает последовательно соединенные двухвходовую схему совпадения и концевой выключатель, и последовательно соединенные широтно-импульсный модулятор, тиристорный ключ и электромагнит реверсивного гидрозолотника причем выходы датчика угла разворота разгрузочного конвейера соединены соответственно через первый решающий блок с вычитающим входом схемы сравнения и через пороговый элемент с управляющими входами обоих решающих блоков, а выход дальномера через последовательно соединенные, второй решающий блок и масштабный преобразователь подключен к суммирующему входу схемы сравнения, выход которой подключен ко входу логического блока, а выходы логического блока подключены в соответствующих каналах управления ко входам широтно-импульсных модуляторов и ко вторым входам схем 89 16 совпадения, выходы которых подключены ко входам блока управления. 2.Устройство по п. 1 , о т л и чающееся тем, что первый решающий блок выполнен в виде сумматора, двух инверторов, блока абсолютной величины и ключа, при этом первый и второй входы сумматора подключены соответственно к выходам первого инвертора и ключа, один из входов которого соединен с выходом второго инвертора, а выход сумматора подключен ко входу блока абсолютной величины. 3.Устройство по п. 2, отличающееся тем, что второй решающий блок выполнен в виде сумматора, инвертора, двух ключей, двух безынерционных звень.ев и нелинейного функционального звена, при этом входы сумматора подключены соответственно к выходам первого инвертора, первого и второго ключей, а выход сумматора подключен через второе безунерционное звено ко входу нелинейного функционального звена. Источники информации, принятые во внимание при экспертизе 1.Макашов В.Н. и др. Погрузочная машина ПНБ-.ЗК. М. , Недра, 1971, с. 36, 8, 92. 2.Авторское свидетельство СССР № 329327, кл. Е 21 F 13/00, 1970 (прототип). / /

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования производительности догрузочного экскаватора роторного комплекса | 1982 |
|
SU1073387A1 |
| Устройство для управления движением горной машины | 1976 |
|
SU562794A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Ультразвуковой датчик производительности горной машины | 1981 |
|
SU956786A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОЙ МАШИНОЙ | 2003 |
|
RU2242837C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| УНИВЕРСАЛЬНАЯ СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОНАСОСОМ | 2010 |
|
RU2430273C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |