1
Изобретение относится к области иЗмерительной техники, в частности оно может быть использовано в качестве датчика положения регулирующего органа (кассеты) привода системы управления и защиты ядерного реактора, в области автоматики и телемеханики и в других областях.
Известны индукционные датчики, содержаище подвижный ротор с магпитопроводящим секторным выступом, вторичные обмотки, расположенные на стержнях магннтопровода, размеп1,енных вокруг центрального стержня .магнитопровода, на котором расположена первичная обмотка.
Однако при использовании таких устройств в качестве датчика положения для повышения точности определения угла поворота ротора необходимо увеличивать габариты датчика положения, что часто не предоставляется возможньгм по конструктивным соображениям.
Целью изобретения является увеличение точности ОНределения углового положения ротора при одновременном уменьшении габаритов датчика положения.
Для этого в предлагаемом датчике положеВИЯ полосы вторичных обмоток расположены но обе стороны первичной обмотки в плоскостях, перПендикулярных продольной оси датчика и смещенных одна относительно другой на величину дискретного угла.
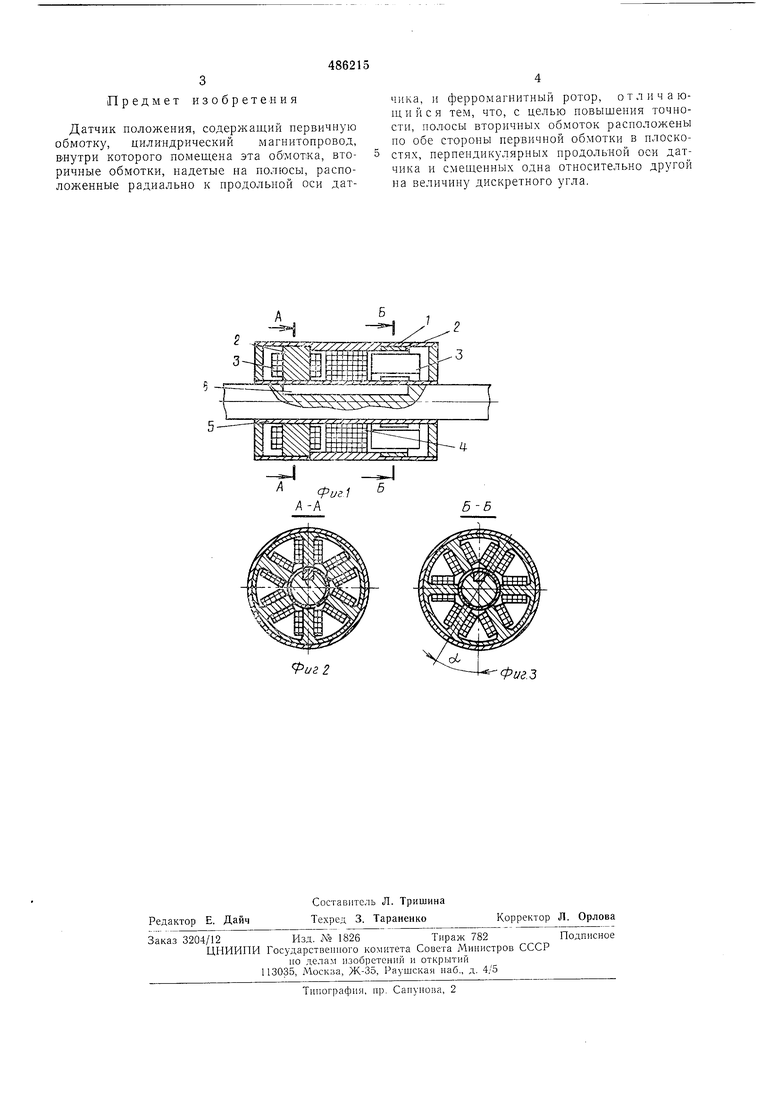
Иа фиг. 1 иредставлен предлагаемый датчик положения, нродольный разрез; на фиг. 2 -разрез по А-А на фиг. 1; на фиг. 3 - разрез по Б-.Б на фиг. 1.
Датчик положения состоит
из наружного 1, являющегося Пилиндрического корпуса
2 с ВТОрИЧНЫМИ магннтопроводом, полюсов (сигнальными) обмотками 3. Полюса 2 расположены радиально и перпендикулярно продольной оси датчика положения.
Иервпчпая обмотка 4 расположена коаксиально на трубе 5 внутри цилиндрического корпуса 1. Ферромагнитный ротор 6 перекрывает полюса 2, расположенные в разных плоскостях датчика положения. Оси полюсов 2 сдвииуты одна относительно другой на величину угла а.
При подаче напряжения питания переменного тока на первичную обмотку 4 во всех вторичных обмотках 3 возбуждается э.д.с., причем ее величина значительно больще в тех вторичных обмотках 3, против полюсов 2 которых устанавливается ферромагнитный ротор 6. При вращении ротора 6 вокруг продольной оси датчика пололсения э.д.с. будет поочередно увеличиваться на других вторичных обмотках 3, что и будет являться информацией о положении ротора 6
Предмет изобретения
Датчик положения, содержащий первичную обмотку, цилиндрИческий магнитопровод, виутри которого помещена эта обмотка, вторичные обмотки, надетые на полюсы, расположенные радиально к продольной оси дат4
чина, и ферромагнитный ротор, отличающийся тем, что, с целью повышения точности, полосы вторичных обмоток расположены по обе стороны первичной обмотки в плоскостях, перпендикулярных продольной оси датчика и смещенных одна относительно другой на величину дискретного угла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения | 1980 |
|
SU926520A2 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| Линейный электродвигатель | 1977 |
|
SU693514A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК НАТЯЖЕНИЯ СТАЛЬНОЙ ПОЛОСЫ ПРИ ХОЛОДНОЙ ПРОКАТКЕ | 1972 |
|
SU358046A1 |
| Вентильный электродвигатель | 1972 |
|
SU445104A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ДЛЯ ИНДИКАЦИИ ВРАЩЕНИЯ | 1969 |
|
SU239826A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1967 |
|
SU224653A1 |
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
| Вентильный электродвигатель | 1974 |
|
SU561257A1 |
PuzZ
Фиг.З
