Изобретение относится к измерительной технике и может быть использовано,в частност |, для измерения положений линейно или вращательнр перемещающихся объектов.
По основному авт. св. № 486215 . -известен датчик положения, содержащий первичную обмотку, размещенную на цилиндрическом магнитопроводе,и две группы вторичных (измерительных) обмоток, надетые на полюсы, расположенные в двух радиальных плоскостях по обе стороны от первичной обмотки. Полюса со вторичными обмотками, находящиеся в одной радиальной плоскости, равномерно распределены по окружности цилиндрического магнитопровода, а оси полюсов, находящихся в разных радиальных плоскостях, смещены друг относительно друга на заданный угол. Ротор датчика содержит ферромагнитный шунт, перекрывающий по длине полюса, лежащие в разных радиальных плоскостях, и при вращении обеспечивает поочередное возбуждение вторичных обмоток 11 ) .
Недостатком датчика является невозможность определять положения
линейно перемещающегося объекта без дополнительного преобразователя движьний.
Цель изобретения - определение положения объекта также и при его линейном перемещении.
Поставленная цель достигается тем, что ротор датчика выполнен с возможностью осевого перемещения и
10 снабжен ( 1) ферромагнитными шунтами, где п - количество вторичных обмоток датчика, шунты расположены последовательно вдоль оси ротора со сдвигом один относительно другого
15 по его дуге окружности на угол, равный угловому сдвигу осей полюсов вторичных обмоток, лежащих в разных радиальных плоскостях.
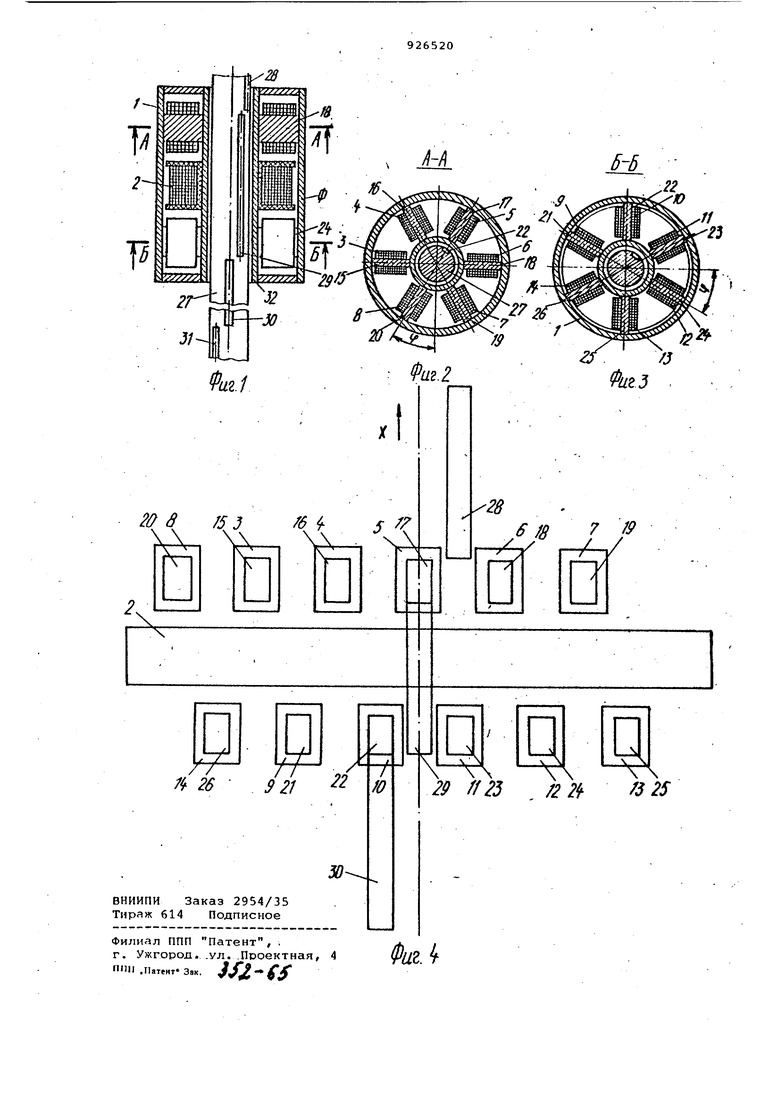
На фиг. 1 изобраткен датчик поло20жения, продольный разрез на фиг. 2 разрез А-А на фиг. 1 на фиг. 3 разрез Б-Б на фиг. 1; на фиг. 4 продольная развертка наружной поверхности ротора и внутренней поверхности магнитопровода.
Датчик положения содержит цилиндрический магнитопровод 1, выполняющий функции корпуса, и размещенные на нем первичную обмотку 2 воэ30 Суждения и две группы BTOpH4tiHX Сизмерительных) обмоток 3-8и9-14 закрепленных на полюсах i5 - 20 и 21 - 26 соответственно. Соответствующие группы полюсов,и вторичHfcjx обмоток размещены в двух радиальных плоскостях по обе стороны от лервичной обмотки 2. В каждой радиальной плоскости оси полюсов 15 - 20 и 21-26 расположены через угол бо по окружности, а оси полюсов вторичных обмоток, лежащих в o iной плоскости, например 15 - 20, сме щены относительно осей полюсов, лежащих во второй плоскости,т.е. 21 26, на заданный угол Sf , равный, например,30,
Датчик содержит также ротор 27, выполненный с возможностью осевого перемещения и снабженный ферромагнитныгии шунтами, число которых равно количеству п вторичных обмоток, в данном случае п 12.
На фиг. 1 и 4 показаны, например, четыре шунта 28 31. Шунты расположены последовательно, один за другим вдоль оси ротора 27, определяя диапазон измеряемых перемещений, и со сдвигом один относительно другого по дуге окружности ротора на угол, равный уголовому сдвигу J осей полюсов вторичных обмоток,лежащих в разных радиальных плоскостях, т.е. в данном случае они смещены на угол 30 . Ширина шунтов может быть равна или меньше ширины полюсов-, а длина должна быть достаточной для того, чтобы они перекрывали одновременно первичную и хотя бы одну вторичную обмотку. Первичная обмотка 2 и вторичные обмотки 3-8и9 -14 отделены от ротора 27 герметизирующей оболочкой 32, изготовленной из немагнитной стали.
Датчик положения работает следующим образом.
При возбуждении первичной обмотки 2- в -магнитопроводе 1 наводится магнитный поток, величина которого зависит от линейного или углового перемещенияротора 27, а именно от положения магнитных шунтов, например 28 - 31, на ртем.
Если какой-либо шунт подходит к полюсу, занимающему такое же, как и он, положение в пространстве, то сопротивление магнитной цепи для поTdKa возбуждения,замыкающегося через этот полюс, уменьшается, вследствие 4fero ЭДС, индуктируемая в соответствующей вторичной обмотке, достигает максимального значения. Например,
при положении ротора 27 (фиг.1 и 4) , максимальная величина ЭДС наводится во вторичной обмотке 5, размещенной на полюсе 17, так как благодаря положению шунта.29 потокосцепление первичной обмотки 2 наибольшее именно с этой обмоткой. При дальнейшем линейном перемещении ротора 27 в
0 направлении х шунт 30 перекрывает одновременно первичную обмотку 2 и . полюс 22 с размещенной на нем вторичной обмоткой 10, благодаря чему максимальное значение ЭДС наводится
5 именно в этой обмотке. В остальных вторичных обмотках наведения ЭДС мала. В результате при линейном или угловом перемещении ротора 27 происходит попеременно возбуждение вторичных обмоток то в одной, то во второй радиальной плоскостях в последовательности, зависящей от положения ферромагнитных шунтов ротора датчика. Максимум сигнала в соответствую5 1Дей вторичной обмотке характеризует положение объекта.
Таким образом, благодаря предлагаемому выполнению ротора датчика положения оказывается возможным контролировать не только угловые, но и линейные перемещения объекта, связываемого с ротором датчика в процессе измерений.
Формула изобретения
Датчик положения по авт. св. № 486215, о тл и ч ающи и с я тем, что, с целью определения положений объекта также и при его линейном перемещении,ротор датчика выполнен с возможностью осевого перемещения и снабжен ( п. - 1) ферромагнитными шунтами, гдеп - количество
45 вторичных обмоток датчика, шунты расположены последовательно вдоль оси ротора со сдвигом один относительно другого по его дуге окружност на угол, ранный угловому сдвигу осей
50 полюсов вторичных обмоток, лежащих в разных радиальных плоскостях.
Источники информации, принятые во внимание при экспертизе ее 1.Авторское свидетельство СССР -- № 486215, кл. G 01 В 7/30, 1974 (прототип). 29 ff25 7525
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| Датчик положения | 1974 |
|
SU486215A1 |
| БЕСКОНТАКТНЫЙ ТРАНСФОРМАТОРНЫЙ РЕГУЛЯТОР ОДНОФАЗНОГО НАПРЯЖЕНИЯ | 1990 |
|
RU2025809C1 |
| Линейный электродвигатель | 1977 |
|
SU693514A1 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1984 |
|
SU1195180A1 |
| СИНХРОННЫЙ ГЕНЕРАТОР С ВОЗБУЖДЕНИЕМ ОТ ПОСТОЯННЫХ МАГНИТОВ | 2004 |
|
RU2273942C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СИЛЫ УПОРА (ВАРИАНТЫ) | 2006 |
|
RU2313467C2 |
| Дифференциальный индукционный датчик углового положения и частоты вращения | 1990 |
|
SU1796891A1 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1984 |
|
SU1224556A1 |