блок усилителей 22. Возврат диеков в иеходное положение управляется электрогидравлическим распределителем 23.
Устройство работает следующим образом.
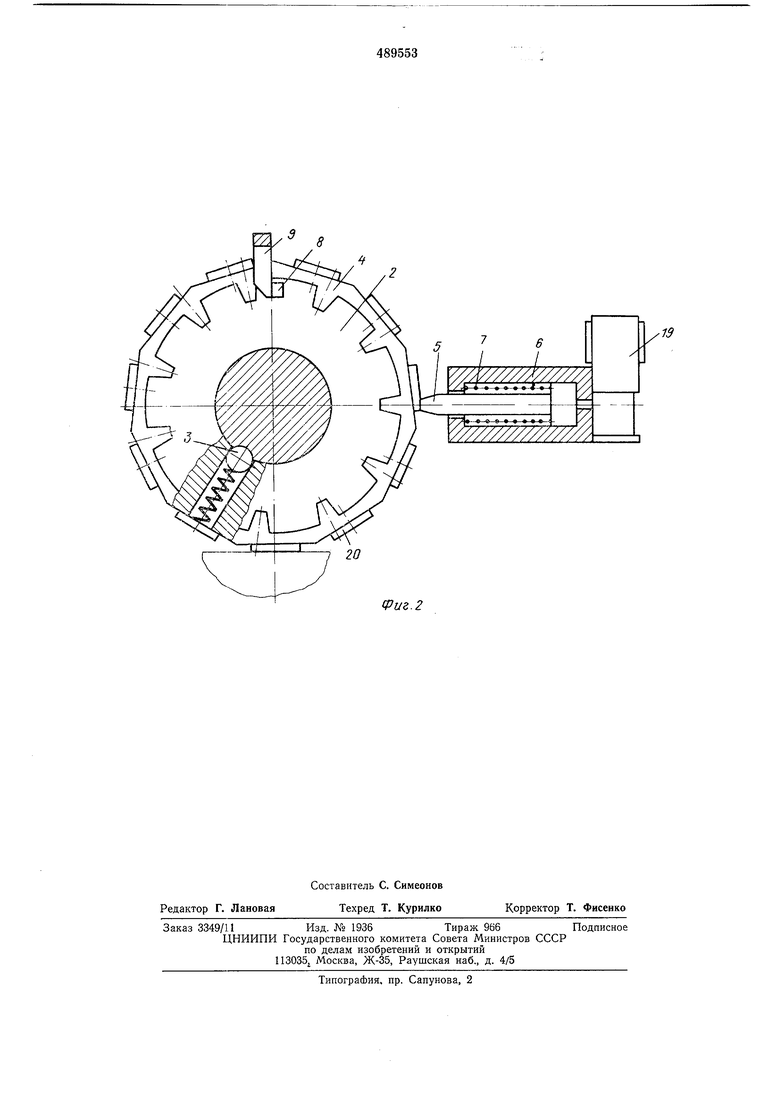
В исходном положении устройства гидропривод 12 занимает крайнее правое (на фиг. 1) положение, при этом все шариковые фиксаторы 3 находятся в лунках знаковых кассет 2, сцепляя их с валом 1. В этом положении на рабочей (нижней) позиции всех знаковых кассет установлены нули. Все стопоры 5 пружинами 7 выведены из пазов 4 кассет 2, а шунт 13 расположен в зоне действия датчика 14 нулевого положения До.
Программа набираемых знаков вводится в блок ввода информации 15. В этот блок информации может поступать с программных переключателей, с перфокарты, перфоленты или от цифровых устройств, контролирующих марку материала, сортность, размеры, порядковый номер и др. параметры изделия, подлежаш,его маркированию. Программа набирается в виде многоразрядного числа в десятичной системе счисления. Некоторым разрядам этого числа на знаковых кассетах могут соответствовать буквенные знаки или другие символы.
После ввода информации в блок 15 подается команда «набор, при этом через инвертор 16 снимается сигнал запрета с блока поразрядного сравнения 17, а через электрогидравлический распределитель 18 подается команда на ход влево поршня гидропривода 12. В исходном положении, пока не начал двигаться поршень гидропривода 12, на вход блока поразрядного сравнения 17 поступает сигнал с датчика До, и на части выходных зажимов блока 17 появляются выходные сигналы, которые соответствуют запрограммированным нулям в многоразрядном числе программы. Эти сигналы, показанные на рис. 1 жирными линиями, запоминаются блоком памяти 21, усиливаются блоком усилителей 22 и воздействуют на электропневмовентили 19, вызывая выдвижение стопоров 5. Таким образом остацовлены кассеты 2, на которых должны быть набраны нули.
Гидропривод 12 через рейку II и шестерню 10 медленно поворачивает вал 1 по часовой стрелке. При вращении вала фиксаторы 3 застопоренных кассет утапливаются, расцепляя их с валом и позволяя этим кассетам оставаться на месте. Остальные кассеты вращаются вместе с валом.
При движении штока привода 12 укрепленный на рейке 11 шунт 13 последовательно воздействует на датчики Д1, Д2, Дз и т. д., которые поочередно выдают команды в блок поразрядного сравнения 17. Сопоставляя эти команды с программой набора, блок 17 управляет стопорением кассет 2 в следующей последовательности: при воздействии шунта 13 на датчик Д1 стопорятся кассеты, на которых должны быть набраны единицы; при воздействии на датчик Д2 стопорятся кассеты,
на которых должны быть набраны двойки, и т. д.
Поскольку вращение вала 1 происходит значительно медленнее подачи команд и срабатывания пневмоприводов 6, стопоры 5 успевают попасть в пазы 4 в тот момент, когда кассеты 2 занимают нужное положение. К концу рабочего хода гидропривода 12 все кассеты оказываются застопоренными в тех положениях, в которых сочетание расположенных на рабочей позиции маркирующих элементов 20 образует строку заданного содержания.
После того как машина нанесет маркировку на изделие, снимается сигнал «набор, при
этом инвертор 16 подает команду электрогидравлическому распределителю 23 на ход вправо порплня гидропривода 12; снимается питание с электропневмовентилей 19, полости цилиндров 6 сообщаются с атмосферой, позволяя пружинам 7 вывести стопоры 5 из пазов 4 кассет 2. Гидропривод 12 реверсируется, возвращая вал 1 в исходное положение. Вал, вращаясь против часовой стрелки, поворачивает кассеты 2, которые останавливаются в
начальном (нулевом) положении упором 9, когда выступы 8 кассет прижимаются к нему. В исходном положении вала фиксаторы 3 входят в лунки кассет, сцепляя их с валом. Устройство готово к вводу новой программы
и повторению цикла.
Предмет изобретения
Устройство для набора знаков в маркировочной машине, включающее приводной вал, на котором размещены кассеты с маркирующими знаками, стопоры клеймовочных дисков и схему управления стопорами, отличающееся тем, что, с целью упрощения конструкции и повышения надежности работы устройства, схема управления стопорами выполнена в виде системы, состоящей из набора датчиков положения вала, блока разрядного
сравнения и блока памяти, связанного через усилители с каждым стопором.
-19 (Риг.2 У//Л ///////А. vjfi. .v..i; г v/
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для набора знаков в маркировочной машине | 1980 |
|
SU946718A2 |
| Устройство для набора знаковМАРКиРОВщиКА | 1979 |
|
SU844095A1 |
| Устройство для набора знаковК КлЕйМОВОчНОй МАшиНЕ | 1978 |
|
SU816610A1 |
| Устройство для клеймения | 1976 |
|
SU617110A1 |
| Диагностируемый электрогидравлический силовой следящий привод | 1987 |
|
SU1539729A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ ПРИВОДОМ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2179144C2 |
| ФОТОНАБОРНАЯ КАРТОГРАФИЧЕСКАЯ МАШИНА | 1967 |
|
SU191352A1 |
| Способ определения угловых ошибок поворотного гидропривода | 2023 |
|
RU2817574C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2003 |
|
RU2262625C2 |