Изобретение относится к электро- гидравлическим следящим приводам (ЭГСП) общего назначения, имеющим встроенный автомат изированный конт-
роль и средства диагностирования и предназначенным для использования в роботах, манипуляторах, радиотелескопах и других автоматических системах.
Цель изобретения - обеспечение автоматического поиска неисправностей элементов ЭГСП.
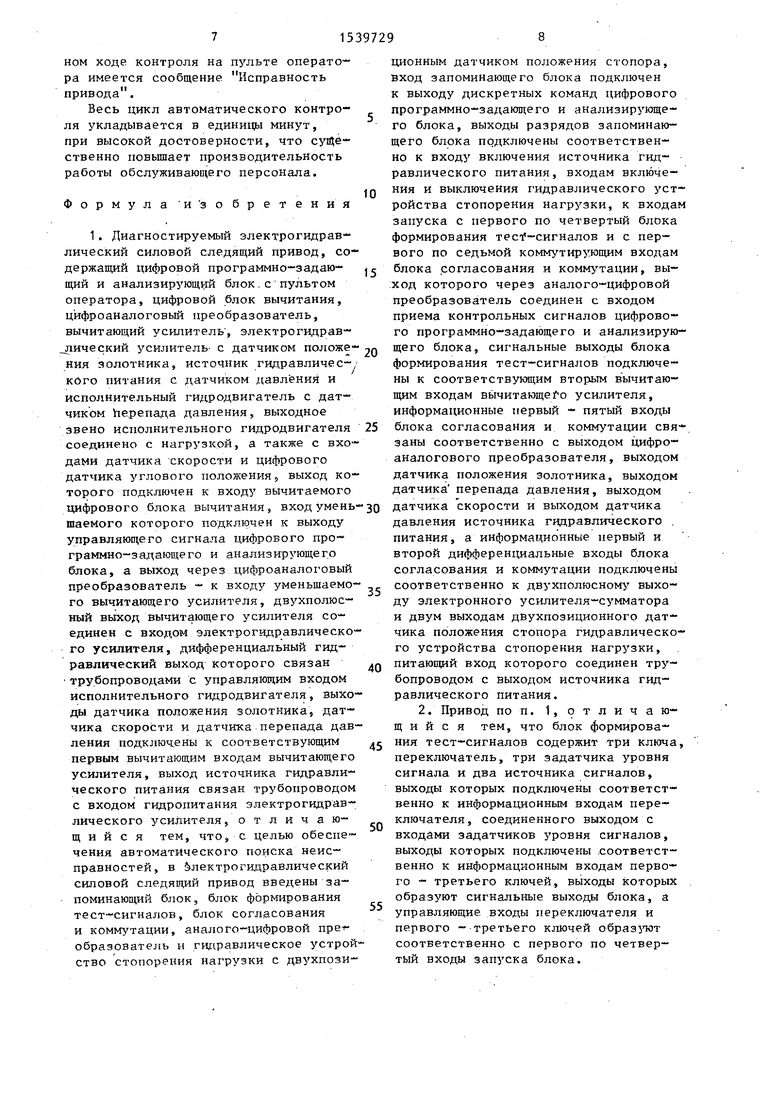
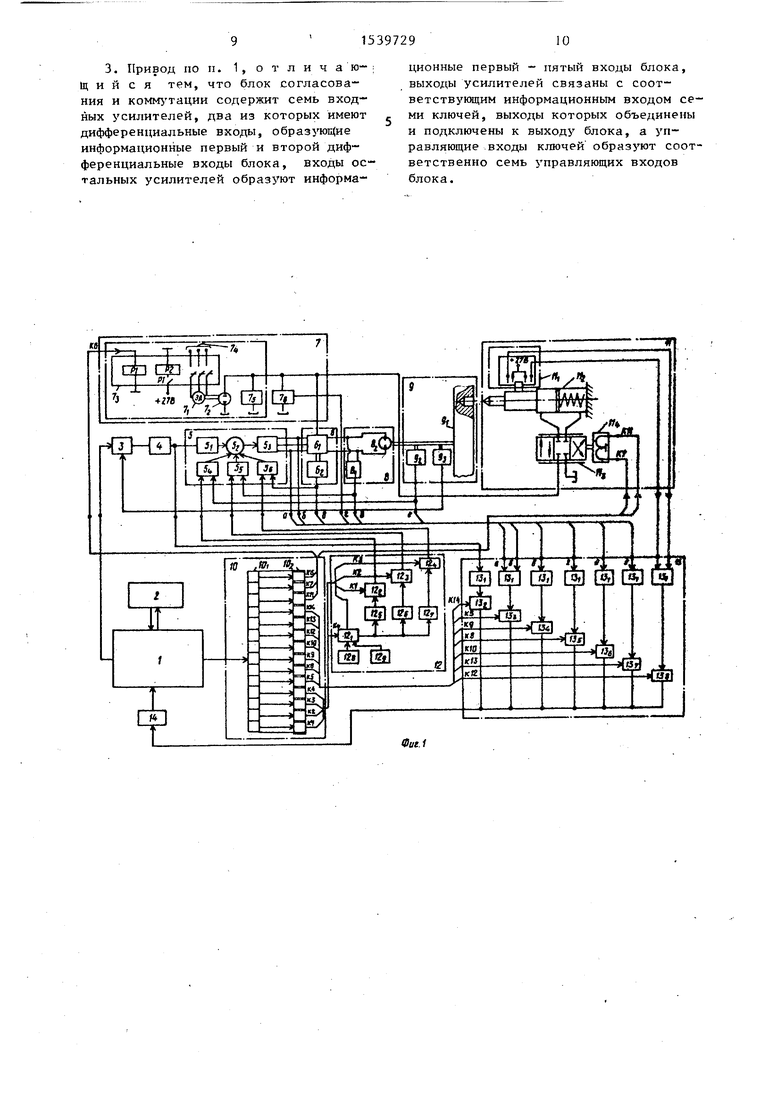
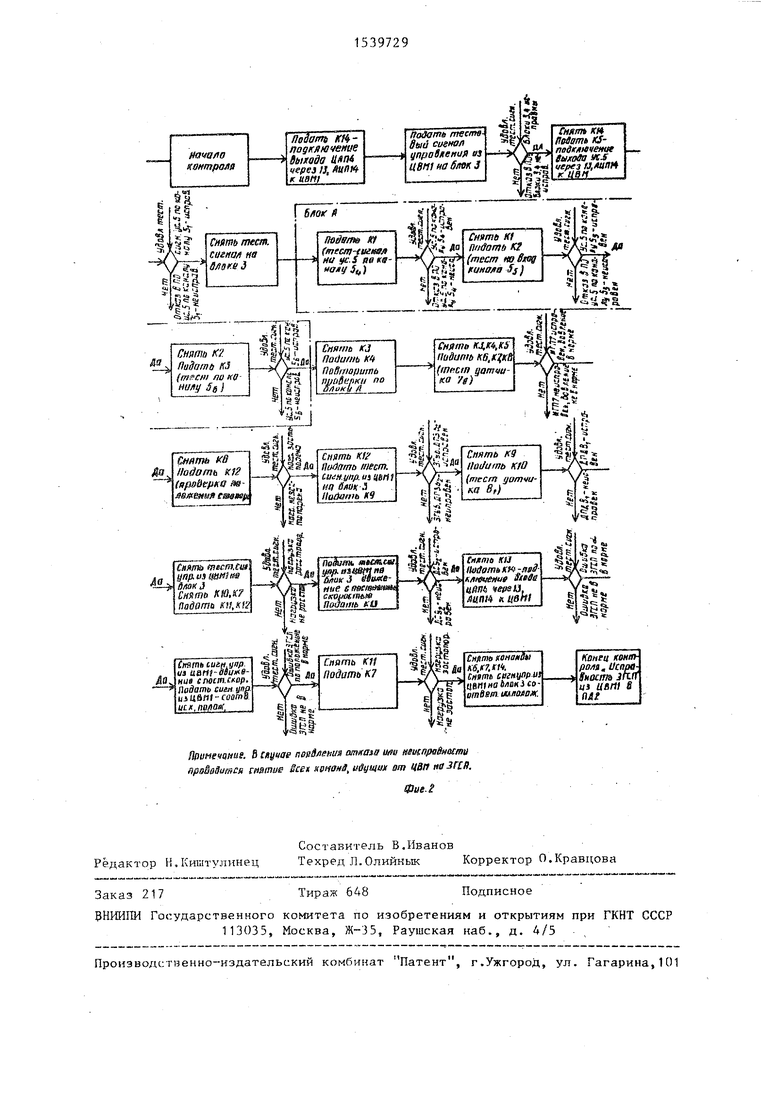
На фиг. 1 приведена структурная схема диагностируемого электрогидравлического силового следящего привода; на фиг. 2 - блок-схема алгоритма проведения контроля и диагностирования неисправных элементов привода.
Диагностируемый электрогидравлический силовой привод содержит цифровой программно-задающий и анализирующий блок 1 с пультом 2 оператора, цифровой блок 3 вычитания, цифроана- лотовый преобразователь (ЦАП) 4, вычитающий усилитель 5 (функциональные вводные усилители 545д5б, выходной усилитель 53 , элемент вычитания) , электрогидравлический усилитель 6 с датчиком положения золотника (усилитель 6 4, датчик 6 2. положения золотника), источник 7 гидравлического питания .с датчиком давления (электродвигатель 7 , гидронасос 7е, блок 7$ включения, сеть переменного тока 7д , клапан 15, датчик 7 давления), исполнительный гидродвигатель 8 с датчиком перепада давления (датчик 8 перепада давления, гидродвигатель Sg) нагрузку 9 (объект 9( регулирования, датчик 9 Ј скорости, цифровой датчик 9$ углового положения), запоминающий блок 10 с регистром 10 дискретных команд и выходными усилителями 10г, гидравлическое устройство 11 стопо- рения нагрз зки с двухиозиционным датчиком j положения стопора (гидропривод стопора 11(2., распределитель 119, электромагнит 114)5 блок 12 фор- мирования тест-сигналов (переключа тель 12(, ключи 12й- 124, задатчи- ки 12я-12-г уровня сигнала, источники I2j 12$ сигналов разного знака или фазы), блок 13 согласования и коммутации (согласующие усилители 13, ключи 13е-13), аналого-цифровой преобразователь (А1Щ) 14.
Цифровой программно-задающий и анализирующий блок 1 наиболее удобно реализуется на основе управляющей ЦВМ, которая в .режиме автоматизированного контроля и диагностирования работает по алгоритму, представленному на фиг. 2.
Задание режима работы ЦВМ и привода осуществляется с пульта 2 оператором. На пульте располагаются также
::
индикаторы для представления результатов диагностирования.
Устройство работает следующим образом.
Рассматриваемый электрогидравлический привод с пульта оператора может быть приведен в один из двух режимов - режим основной работы и в режим автоматического контроля.
В режиме основной работы задающий сигнал, определяющий положение нагрузки (с необходимым ограничением скорости его нарастания), задается цифровым программно-задающим и анализирующим блоком 1 блоку 3 и далее через элементы 4,5 и 6 передается к исполнительному гидродвигателю 8, который приводит в движение нагрузку 9. Источник 7 гидравлического питания при этом включен (для чего блок 1 в регистр Юд записывает команду К на включение источника 7), а нагрузка расстопорена (устройство 11 стопоре- ния аналогичным образом получает команду К ц из блока 10).
Необходимая динамика работы привода (динамика наведения нагрузки в заданное положение) определяется обратными связями от датчиков ,8, 9 i,9$ к элементам 3,5 в контуре привода. При этом сигналы от блока 1 блоку 3, от датчика 9 блоку 3 в данном приводе передаются в цифровой форме , остальные сигналы аналоговые (постоянный ток разной полярности или переменный ток с фазовым признаком. Для перехода от цифровых сигналов к аналоговым используется ЦАП 4.
В режиме автоматизированного контроля с пульта 2 оператора вводится команда для реализации алгоритма по фиг.2, в соответствии с которым начинается последовательное формирование блоком 1 команд для блоков 10 и 3 с анализом получающегося состояния элементов привода, которое через элементы 13 и 14 передается блоку 1 и сравнивается там с известными эталонными значениями.
Для получения высокой достоверности контроля он проводится в несколько этапов в определенной последовательности. В начале проверяется электронная часть привода без подачи гидравлического питагия, затем проверяется гидравлическая часть привода при застопоренной нагрузке (без ее перемещений) и, наконец, проверяются линя-
мические свойства привода путем контрольных движений нагрузки. Вначале контролю подвергается цифровой блок 3 вычитания совместно с ПАП 4. Для этого блок 1 в блок 10 передает команду для подключения ПАИ 4 через усилитель 13, ключ 13п, АЩ 14 к свое2
му входу приема контрольных сигналов и формирует тестовый код заданной величины перемещения блоку 3. Этот сигнал, возвратившийся назад в блок 1 по цепи через элементы 3,4,13 и 14, контролируется на допуск с эталонным значением, хранящимся в блоке 1 ,
При нормальной работе элементов 3 и 4 проверяется вычитающий усилитель 5. Вначале проверяется цепь с элементами 5,, для чего в блок 10 из блока 1 вводится команда Kg-. При этом в блоке 13 срабатывает ключ 13i5 и выход усилителя j (точки а , 5 на выходах элемента 5) подключается через блок 13 к блоку 1 для контроля. При этом в блок 3 по-прежнему дается тестовый код заданной величины перемещения.
Работоспособность вычитающего усилителя Ь по входам через элементы 54,5ss56 проверяется путем по- следовательно подачи на них тестовых CHI налов с блока 12 через ключи , 12з,12,$ (по командам К,К2 Ко, от блока 10). Команда К5 для подключения выхода вычитающего усилителя к АЦП 14 дпя анализа сохраняется вместе с командами К,,Ка,К,, При .необходимости изменения полярности или фазы сигнала (в зависимости от вида усилителя) имеется команда К, которая управляет переключателем 124 .
В случае положительных результатов предыдущих проверок осуществляется проверка гидравлической части привода. В блок 10 вводится команда Кб на включение источника 7 гидравлического питания и К7 на включение устройства 11 стопорения нагрузки. Но команде Kg (для ключа 13g) датчик 1ь давлении подключается через АЦП 14 к блоку 1 , где проводится сравнение величины давления с эталонным значением.
Затрм проверяются датчики положения золотника и перепада давления (6g и 84), для чего на вход блока 3 подается тестовый код, а датчики подключаются для контроля к блоку 1
0
5
0
5
0
5
0
5
0
5
через блок 13 командами Kq и . При этом вследствие застопоренной нагрузки датчик 8{ должен показать рабочее давление источника 7 гидравлического питания, а золотник перемещается (датчик 6) на величину, пропорциональную тестовому коду, поданному на вход блока 3. Последнее свидетельствует и об исправности электрогидравлического усилителя 6 в целом .
В заключение проверяются некоторые динамические свойства привода. На вход блока 3 подается код исходного положения (нулевого), а на устройство 11 стопорения - команда К на освобождение нагрузки (выключение стопорения). Застопоренное или рас- стопоренное состояние нагрузки контролируется блоком 1 по получении сигнала от контактного датчика 11 через блок 13, на который подается команда К(2. . Вследствие использования в цепи от датчика 11.4 усилителя 131 с дифференциальными входами (т.е. один из них инвертирующий) блок 1 че- рез ключ 13j получает положительный сигнал при расстопоренном положении привода и отрицательный при застопоренном.
После получения подтверждения о расстопоренном положении привода блок 1 для блика 3 начинает формировать коды, соответствующие командам на движение нагрузки 9 с постоянной скоростью. Величина скорости, измеренная датчиком 9(j, через блок 13 (ключ 13-j) возвращается в блок 1 для сравнения (блоком 10 для блока 13 формируется команда К «о.) .
Следующим шагом является проверка динамической ошибки, для чего команда V. № сменяется командой К,ц, в результате сигнал рассогласования с выхода ЦАП 4 проводится через блок 13, АЦП 14 к блоку 1 и сравнивается там с эталонным значением.
Контроль заканчивается установкой , привода в исходное (нулевое) положение .
Если в процессе одной из выше перечисленных проверок обнаруживается отказ или отклонение сверх допуска от контролируемой характеристики,. дальнейший контроль прерывается, а на пульте оператора - указание на отказ конкретного блока (например, в виде номера отказа). При нормаль-
ном ходе контроля на пульте операто- ра имеется сообщение Исправность привода.
Весь цикл автоматического контроля укладывается в единицы минут, при высокой достоверности, что существенно повышает производительность работы обслуживающего персонала.
Формула и з обретения
1. Диагностируемый электрогидравический силовой следящий привод, соержащий цифровой программно-задаю- .,- щий и анализирующий блок с пультом оператора, цифровой блок вычитания, цифроаналоговый преобразователь, вычитающий усилитель, электрогидрав- ический усилитель с датчиком положе- 2Q ния золотника, источник гидравлического питания с датчиком давления и сполнительный гидродвигатель с датиком перепада давления, выходное звено исполнительного гидродвигателя 25 соединено с нагрузкой, а также с вхоами датчика скорости и цифрового атчика углового положения, выход которого подключен к входу вычитаемого цифрового блока вычитания, входумень-30 шаемого которого подключен к выходу управляющего сигнала цифрового программно-задающего и анализирующего блока, а выход через цифроаналоговый преобразователь - к входу уменьшаемо- го вычитающего усилителя, двухполюсный выход вычитающего усилителя соединен с входом электрогидравлического усилителя, дифференциальный гидравлический выход которого связан Q трубопроводами с управляющим входом исполнительного гидродвигателя, выходы датчика положения золотника, датчика скорости и датчика перепада давления подключены к соответствующим д первым вычитающим входам вычитающего усилителя, выход источника гидравлического питания связан трубопроводом с входом гидропитания электрогидрав- лического усилителя, о т л и ч а ю- щ и и с я тем, что, с целью обеспечения автоматического поиска неисправностей, в Ьлектрогидравлический силовой следящий привод введены запоминающий блок, блок формирования тест-сигналов, блок согласования и коммутации, аналого-цифровой прег- обраэователь и гидравлическое устройство стопорения нагрузки с двухпози0
,- Q 25 30 Q д
ционным датчиком положения стопора, вход запоминающего блока подключен к выходу дискретных команд цифрового программно-задающего и анализирующего блока, выходы разрядов запоминающего блока подключены соответственно к входу включения источника гидравлического питания, входам включения и выключения гидравлического устройства стопорения нагрузки, к входам запуска с первого по четвертый блока формирования Tecf-сигналов и с первого по седьмой коммутирующим входам блока согласования и коммутации, выход которого через аналого-цифровой преобразователь соединен с входом приема контрольных сигналов цифрового программно-задающего и анализирующего блока, сигнальные выходы блока формирования тест-сигналов подключены к соответствующим вторым вычитающим входам вычитающего усилителя, информационные первый - пятый входы блока согласования и коммутации связаны соответственно с выходом цифро- аналогового преобразователя, выходом датчика положения золотника, выходом датчика перепада давления, выходом датчика скорости и выходом датчика давления источника гидравлического питания, а информационные первый и второй дифференциальные входы блока согласования и коммутации подключены соответственно к двухполюсному выходу электронного усилителя-сумматора и двум выходам двухпоэиционного датчика положения стопора гидравлического устройства стопорения нагрузки, питающий вход которого соединен трубопроводом с выходом источника гидравлического питания.
2. Привод по п. 1, отличающийся тем, что блок формирования тест-сигналов содержит три ключа, переключатель, три задатчика уровня сигнала и два источника сигналов, выходы которых подключены соответственно к информационным входам переключателя, соединенного выходом с входами задатчиков з ровня сигналов, выходы которых подключены соответственно к информационным входам первого - третьего ключей, выходы которых образуют сигнальные выходы блока, а управляющие входы переключателя и первого - третьего ключей образуют соответственно с первого по четвертый входы запуска блока.
3. Привод по п. 1 , о т л и ч а ю- 1д и и с я тем, что блок согласования и коммутации содержит семь входных усилителей, два из которых имеют дифференциальные входы, образующие информационные первый и второй дифференциальные входы блока, входы остальных усилителей образуют информационные первый - пятый входы блока, выходы усилителей связаны с соответствующим информационным входом семи ключей, выходы которых объединены и подключены к выходу блока, а управляющие входы ключей образуют соответственно семь управляющих входов блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| Электрогидравлический следящий привод | 1981 |
|
SU981713A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2020298C1 |
| Система адаптивного управления электрогидравлическим следящим приводом с контролем | 2015 |
|
RU2610851C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ОДНОКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361122C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ СЛЕДЯЩЕГО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271479C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД С ДОПОЛНИТЕЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ ГИДРОДВИГАТЕЛЯ | 2024 |
|
RU2826275C1 |
| Электрогидравлическая система управления | 2018 |
|
RU2708004C1 |
Изобретение относится к электрогидравлическим следящим приводам (ЭГСП) общего назначения, имеющим встроенный автоматизированный контроль и средства диагностирования и предназначенных для использования в роботах, манипуляторах, радиотелескопах и других автоматических системах. Цель изобретения - обеспечение автоматического поиска неисправностей элементов ЭГСП. Диагностируемый электрогидравлический силовой следящий привод содержит цифровой программно-задающий и анализирующий блок с пультом оператора, цифровой блок вычитания, цифроаналоговый преобразователь, вычитающий усилитель, электрогидравлический усилитель с датчиком положения золотника, источник гидропитания, исполнительный гидродвигатель с датчиком перепада давления, нагрузку с датчиком скорости и датчиком положения, запоминающий блок, гидравлическое устройство стопорения нагрузки, блок формирования тест-сигналов, блок согласования и коммутации, аналого-цифровой преобразователь. Привод может использоваться в двух режимах: в режиме основной работы и в режиме автоматического тест-контроля. В последнем случае по сигналам анализирующего блока вначале проверяется электрическая часть привода, затем при застопоренном приводе - гидравлическая часть привода и, наконец, путем совершения пробных движений при расстопоренной нагрузке определяются отдельные динамические характеристики. Контролируемые сигналы с ра
и
Qetl
Примечание, fi случае пвябления отказа паи ншпраВявсти йри&айитгн гяетие See квнанй, идущих от ЦВп не ЗГСИ.
Фие.г
Редактор Н.Киштулинец
Составитель В.Иванов
Техред Л.Олийкык Корректор О.Кравцова
Заказ 217
Тираж 648
5НИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
E2i tvB
S3
Подписное
| Гониодский В.И., Склянский Ф.И., Шумилов И.С | |||
| Привод рулевых поверхностей самолетов | |||
| И.: Машиностроение, 1974, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU274A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Следящие приводы./Под ред | |||
| Б.К.Че- моданова, М.: Энергия, 1976, кн.2, с | |||
| Способ приготовления консистентных мазей | 1912 |
|
SU350A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
