Изобретение относится к области транспортной автоматики и может быть применено, например, на складах с ячейками, расположенными горизонтальными и вертикальными рядами.
Известны устройства для автоматического выбора нап)авлеиия движения перемещаемого объекта, содержащие переключатели рядов ячеек, конечные выключатели, трансформатор е двумя вторичными обмотками, одна из которых разбита на равные между собой секции, причем обмотки подключены к выпрямительным мостам, включеин1 1м своими выходами встречно между собой через катушку поляризованного реле и нагруженным каждый на свой резистор.
Недостатком известных устройств является то, .что они не позволяют унравлять перемещениями объекта но двухкоординатной системе.
С целью обесиечения управления по двухкоординатной системе вторичная обмотка трансформатора разбита на равные мелсду собой секпии, число которых равно количеству ячеек соответствующей координаты, причем последующие ее выводы соединены с выпрямительным мостом через нормально OTj крытые контакты конечных выключателей соответствуюп1,ей координаты, а начальный вывод первой вторичной обмотки транеформатора соединен с выирями.тельиым мостом непосредственно и последующие ее выводы подключены к выпрямительному мосту через нормально открытые контакты перек.почателя, соответствуюн1его определенной коорд нате.
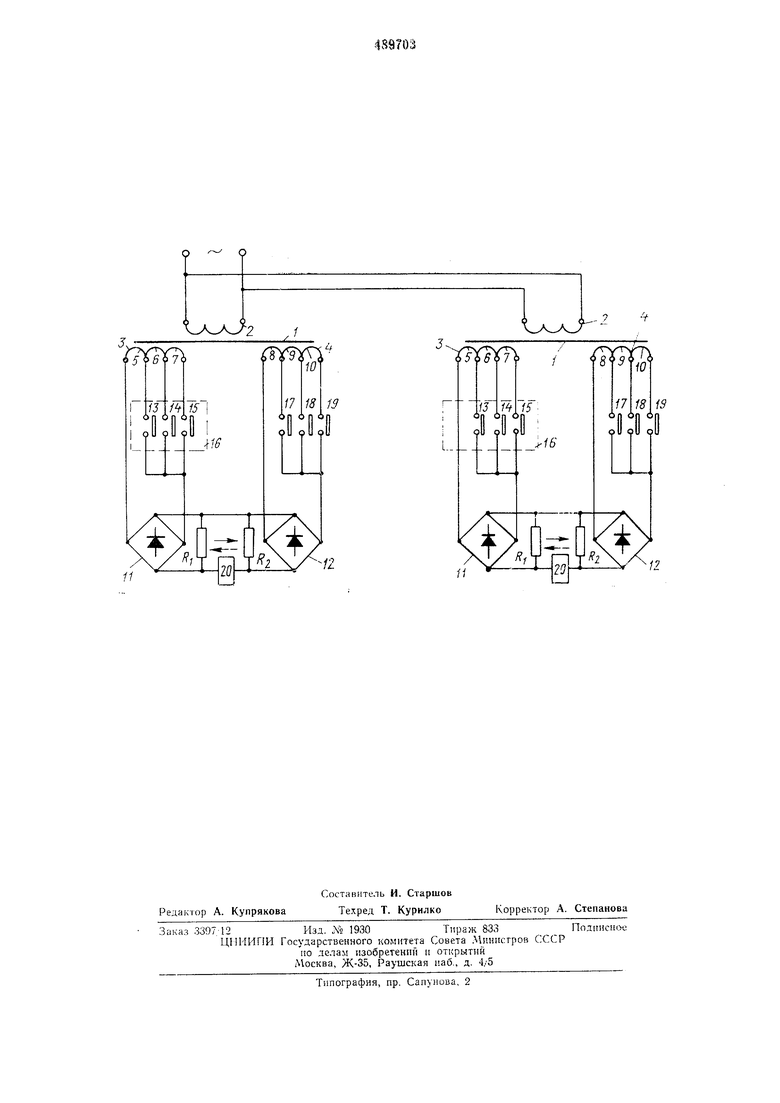
На чертеже представлена принципиал1,иая схема предложенного устройства.
В схеме управления по каждой координате трансформатор 1 имеет одну первичную обмотку 2, подключенную к источнику питания, и две вторичные обмоткн 3 и 4. Обо вторичные обмоткп 3 и 4 трансформатора 1 разбиты на равные меж;1у собой секции 5-7 и 8 10 соответственно, количество которых в каждой обмотке равно количеству ячеек соответствующей коорД1П аты.
Начала вторичных обмоток 3 и 4 соединене непосредственно с вынрямптельнымн мостами 11 и 12 соответственно . Последуюни е выводы первой вторпчиой обмотки 3 соединеиы с выпрямительным мостол 11 через нормально открытые контакты 13-15 переключателя 16 координаты. Последующие выводы второй вторичиой обмотки подключены к выпрямительному мосту 12 через иормальпо открытые контакты 17-19 конпевых выключателей координаты.
Выходы мостов 11 и 12 соединены встречно между собой через обмотку полярпзоваиного
реле 20, и каждый мост нагружен на свой резистор RI и Rz соответственно.
В предложенном устройстве работа схем управления по каждой координате аналогична, поэтому рассмотрим, например, работу схемы управления перемещениями объекта по координате X.
Если первоначально объект находится, например, у конечного выключателя с контактом 18, а переключателем 16 задается пункт следования с контактом 13, то при замыкапии обоих указанных контактов выпрямительный мост 11 подключается к одной секции 5, а выпрямительный мост 12 к двум секциям 8 и 9 обмотки 4 трансформатора. Напряжение на выходе моста 11 будет меньше напряжения моста 12.
Через обмотку поляризованного реле 20 потечет ток в направлении, указанном па чертеже сплошной стрелкой, реле сработает и замкнет левый контакт, что соответствует команде на движение объекта «Вперед. Объект начинает движение в сторону конечного выключателя с контактом 17 и, когда оказывается около него, конечный выключатель с контактом 18 отключается, а замыкается конечный выключатель с контактом 17.
От выпрямительного моста 12 отключается секция 9, катушка поляризованного реле 20 обесточивается, и движение объекта нрекраш,ается.
Если, например, нервоначальио объект находится у конечного выключателя с контактом 18, а переключателем 16 задается пункт следования с контактом 15, то в этом случае при замыкании обоих указанных контактов выпрямительный мост 1 1 подключается к трем секциям 5-7, а выпрямительный мост 12 - к двум секциям 8 и 9 вторичных обмоток трансформатора.
Напряжение па выходе моста 11 будет больше нанряжепия на выходе моста 12. Поляризованное реле 20 сработает и замкнет свой правый контакт, что соответствует команде на движение объекта «Назад. Объект начинает движение в сторону конечного выключателя с контактом 19 и, когда оказывается около него, конечный выключатель с контактом 18 размыкается, и замыкается конечный выключатель с ко тактом 19. Катушка поляризованного реле теряет питапис, и движение объекта прекращается.
Предмет и з о б р е т е н и я
Устройство д;1Я автоматического выбора направления движения перемещаемого объекта, содержащее переключатели рядов ячеек, конечные выключатели, трансформатор с
двумя вто)пчными обмотками, одна из которых разбита па равные между собой секции, причем обмотки подключены к выпрямительным мостам, включенным своими выходами встречно между собой через катушку поляризованного реле и нагруженным каждый на свой резистор, отличающееся тем, что, с целью обеспечения управления по двухкоординатной системе, вторая вторичная обмотка трансформатора разбита на равные между
собой секции, число которых равно количеству ячеек соответствующей координаты, причем последующие ее выводы соедипены с в1)Шрямительпым мостом через нормально открытые контакты концевых выключателей
соответствующей координаты, а начальный вывод первой вторичной обмотки трансформатора соединен с выпрямительным мостом неносредственно и последующие ее выводы подключены к выпрямительному мосту через
нормально открытые контакты переключателя, соответствующего определеппой координате.
о о
/
,-
J
/7 18 19 on о п о о и о
/7 /5
f J 1/4I /5 л Ьп or On On Or
QU OU о
/
