Изобретение относится к автоматизации транспорта и может быть использовано для управления межоперационными транспортными средствами в поточных линиях, например, тележкой-манипулятором, которая для обслуживания рабочих мест перемещается по фиксированному пути.
Известно устройство для автоматического выбора направления движения объекта, содержащее переключатели адресов, конечные выключатели, трансформатор с двумя вторичными обмотками, разделенными на.одинаковые секции по числу позиций останова и подключенные одними из выводов к одним из входов выпрямительных мостов непосредственно, а другими через соответствующие замыкающие контакты переключателей адресов и конечных выключателей к. другим входам выпрямительных мостов, одни из выходов которых соединены между собой непосредственно, а другие подключены к выводам обмотки поляризованного реле и через резисторы соединены с первыми 1.
Недостатками этого устройства являются сложность конструкции и низкая надежность.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для автоматического выбора направления движения объекта, содержащее командные блоки, одни из выводов которых через размыкающие контакты взаимной блокировки соединены между собой последовательно подключенными размыкающими контактами, установленными на позициях останова датчиков положения объекта, соединенных одним из выводов замыкающих контактов с одним из выводов блока останова, другой вывод которого и другие выводы командных блоков подключены к одному из выводов источника питания 2.
Недостатками известного устройства, снижающими его надежность, являются наличие большого числа коммутационных элементов и сложная многоступенчатая схема их соединения.
Цель изобретения - повыщение надежности устройства.
Поставленная цель достигается тем, что устройство для автоматического выбора направления движения объекта, содержащее командные блоки, одни из выводов которых через размыкающие контакты взаимной блокировки соединены между собой последовательно подключенными размыкающими контактами, установленными на позициях останова датчиков положения объекта, соединенных одними из выводов замыкающих контактов с одним из выводов блока останова, другой вывод которого и другие ВЬ1ВОДЫ
командных блоков подключены к одному из выводов источника питания, снабжено
ключами адресования по числу позиций останова и разделительными диодами, причем одни из выводов размыкающего контакта и другой вывод замыкающего контакта каждого датчика положения объекта соответственно. через разделительный диод и непосредственно подключены через ключ адресования одноименной позиции останова к другому выводу источника питания.
На чертеже представлена электрическая
схема устройства для автоматического выбора направления движения объекта.
Устройство содержит командные блоки 1 и, 2, одни из выводов которых через размыкающие контакты 3 и 4 взаимной блокировки соединены между собой последовательно
подключенными размыкающими контактами 5.1 ... 5.П, установленными на позициях останова датчиков положения объекта Одни из выводов замыкающих контактов 6.1 ... 6.П датчиков положения объекта соединены
с одним из выводов блока 7 останова. Другой вывод блока 7 останова и другие выводы командных блоков 1 и 2 подключены к одному из выводов источника 8 питания. Один из выводов размыкающего контакта 5.1 ... 5.п и другой вывод замыкающего контакта 6.1 ...
6.П каждого датчика положения объекта соответственно через разделительный диод 9.1 ... 9.П и непосредственно подключены через ключ 10.1 ... 10.П одноименной позиции останова к другому выводу источника 8 питания.
Устройство работает следующим образом. Тележка-манипулятор находится, например, на третьей позиции останова и контакт 5.3 соответствующего датчика положения объекта разомкнут. Для перемещения тележки-манипулятора, например, на четвертую позицию останова замыкают соответствующий ключ 10.4. Включается командный блок 1 по цепи: размыкающий контакт 4, контакты 5.П ... 5.5 датчиков положения объекта,
диод 9.4, ключ 10.4, источник 8 питания. По команде блока 7 тележка-манипулятор перемещается, например, вперед на четвертую позицию останова. При достижении последней срабатывает соответствующий датчик положения объекта, замыкающий контакт 6.4 которого включает блок 7 останова по цепи: ключ 10.4, источник 8 питания. По команде блока 7 тележка-манипулятор останавливается на заданной позиции.
Для перемещения тележки-манипулятора
с третьей позиции останова, например, на вторую замыкается соответствующий ключ 10.2. Включается командный блок 2 по цепи: размыкающий контакт 3, контакты 5.1 и 5.2 датчиков положения объекта, диод 9.2, ключ 10.2, источник 8 питания. По команде блока
2 тележка-манипулятор перемещается назад и на второй позиции взаимодействует с соответствующим датчиком лоложения объекта. Замыкающий контакт 6.2 последнего включает блок 7 останова по цепи: ключ 10, источник 8 питания. Тележка-манипулятор производит останов на заданной второй позиции. При замыкании нескольких ключей 10.1, 10.2 и 10.4, 10.5 с одной и другой стороны относительно позиции, например третьей позиции останова, перемещение тележкиманипулятора в одном из направлений начинается аналогичным образом. Достигнув одной из заданных позиций, например четвертой, при воздействии на соответствующий датчик положения объекта осуществляется, как и в описанном случае, останов тележки-манипулятора. После размыкания соответствующего ключа 10.4 тележка-манипулятор продолжает перемещение в том же направлении к пятой позиции останова. После выполнения этой части задания блок 1 отключается, а блок 2 включается и тележка-манипулятор для обслуживания заданных первой и второй позиций начинает движение в противоположном направлении аналогично описанному. Возможна ситуация, когда тележка-манипулятор находится, например, на третьей позиции останова, а вводятся одновременно задания на обслуживание второй и четвертой позиций останова. Первым включается командный блок 1 и 2, который имеет меньщее время срабатывания. При исчезновении питающего напряжения или необходимости отклонить установленное задание, когда тележка-манипулятор перемещается, место останова является случайным. Предположим, что оно расположено между третьей и четвертой позициями останова. В этом положении все контакты 5.1 ... 5.п датчиков положения объекта оказываются замкнутыми. При повторном появлении напряжения или при вводе задания для обслуживания четвертой позиции возможен ощибочный выбор направления движения в силу изложенных выще причин. Тележка-манипулятор направляется в сторону противоположную заданной позиции останова. При достижении третьей позиции останова и взаимодействия тележки-манипулятора с датчиком положения объекта размыкающим контактом 5.3 производится отключение блона 2, что позволяет включиться блоку 1. Тележка-манипулятор изменяет направление движения и перемещается к заданной четвертой позиции останова. Изобретение позволяет исключить про стой и холостые пробеги транспортных средств за счет возможности ввода заданий в процессе работы и их сохранения при отклонении питания.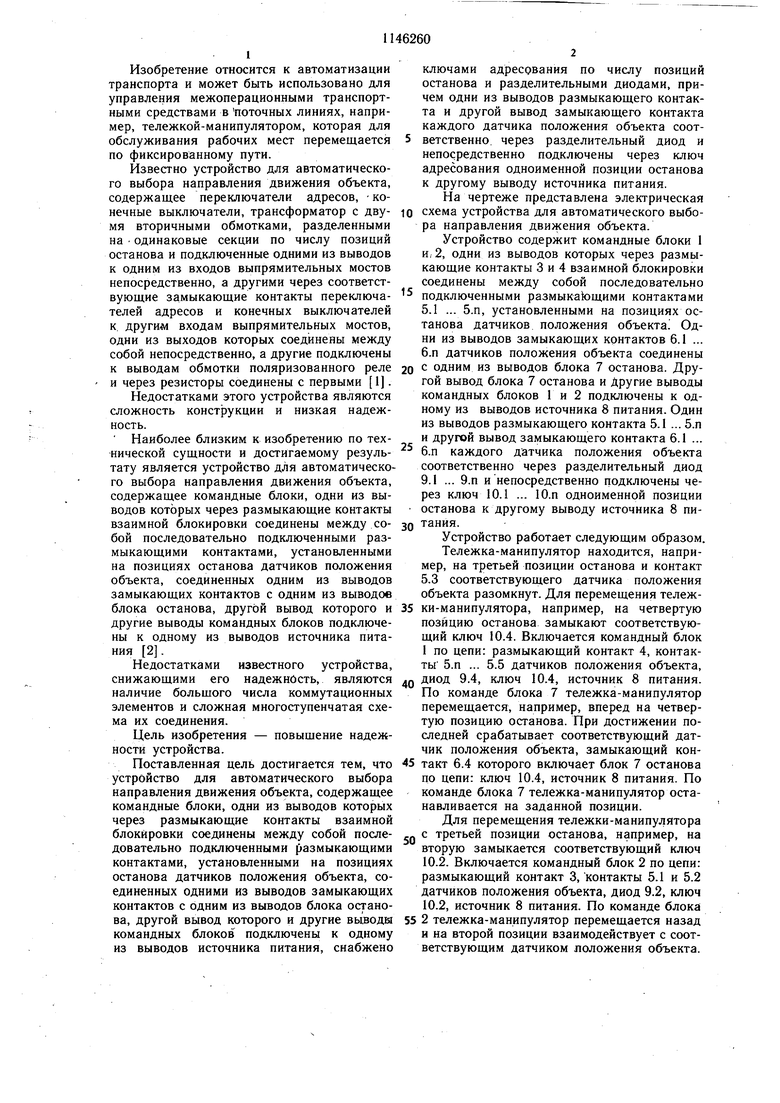

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1980 |
|
SU900551A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1518249A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для автоматического вы-бОРА НАпРАВлЕНия дВижЕНия Об'ЕКТА | 1979 |
|
SU819018A2 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1263598A1 |
| Устройство для автоматического выбора направления движения объекта | 1989 |
|
SU1669827A1 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1613410A2 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для автоматического адресования объекта | 1985 |
|
SU1273316A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА, , содержащее командные блоки, одни из выводов которых через размыкающие контакты взаимной блокировки соединены между собой последовательно подключенными размыкающими контактами, установленными на позициях останова датчиков положения объекта, соединенных одними из выводов замыкающих контактов с одними из выводов блока осканова, другой вывод которого и другие выводы командных блоков подключены к одному из выводов источника питания, отличающееся тем, что, с целью повышения надежности, оно снабжено ключами адресования по числу позицииостанова и разделительными диодами, причем один из выводов размЫкаЮщего контакта и другой вывод замыкающего контакта каждого датчика положения объекта соответственно через разделительный диод и непосредственно подключены через ключ адресования одноименной позиции останова к другому выводу источника питания.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство автоматического выбора направления движения перемещаемого объекта | 1972 |
|
SU489703A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Управляющее устройство транспортного механизма | 1973 |
|
SU485942A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
