сравнения, делимый вход каждого блока деления подсоединен к выходу своего выпрямителя, второй вход этого блока подключен к выходу другого выпрямителя, а выходы делительных устройств через соответствующие ограничители подсоединены к ценям отсечек регуляторов положенияНа чертеже дана блок-схема описываемого электронрнвода.
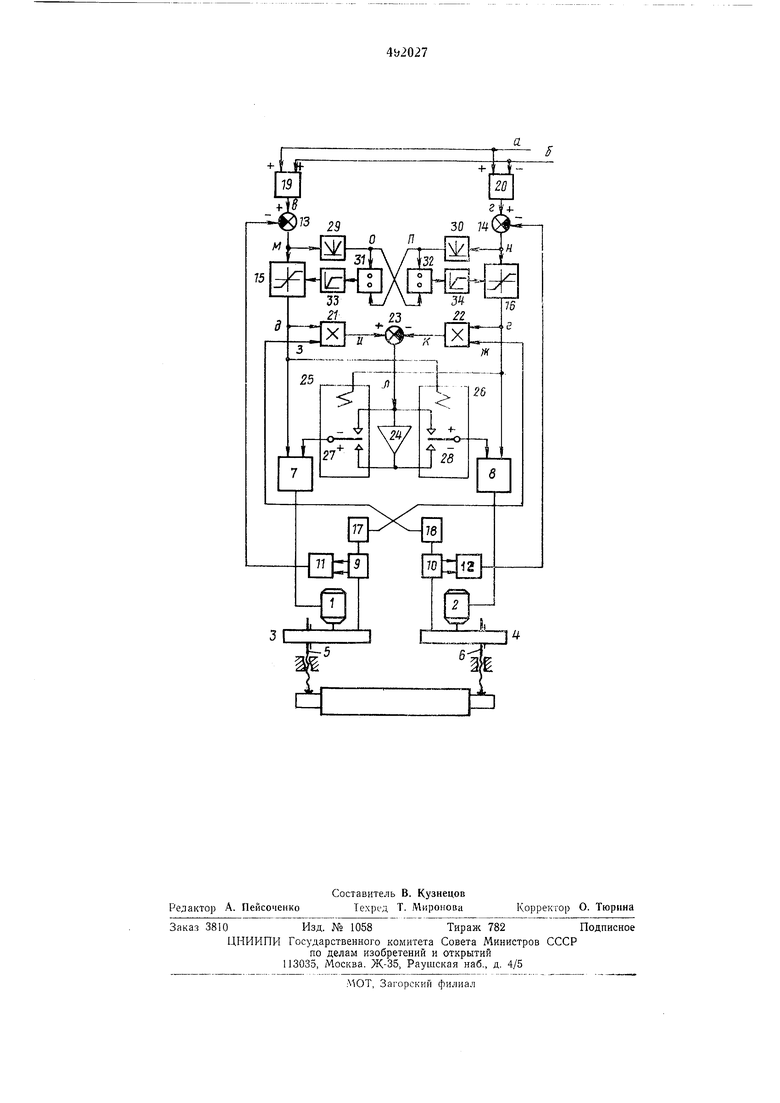
Электропривод состоит из двух позиционных следящих систем, содержащих электродвигатели 1 и 2 постоянного тока, сочлененные через редукторы 3 и 4 с нажимными винтами 5 и 6, индивидуальные регулируемые преобразователи 7 и 8, выходы которых подключены к зажимам электродвигателей, следящие сельсины 9 и 10, сочлененные с валом нажимного винта, фазочувствительные выпрямители 11 и 12, входы которых подключены к статорам следящих сельсинов, узлы 13 и 14 сравнения, соединенные обратной связью с выходами фазочувствительных устройств, регуляторы 15 и 16 положения с управляемой отсечкой, входы которых подключены к выходам узлов сравнения, а выходы соединены с управляющими входами преобразователей, датчики 17 и 18 скорости, используемые в цепях обратной связи по скорости, синхронизированные задатчики 19 и 20 перемещения со ступенчатым преобразованием сигнала, выходы которых подключены к задающим входам узлов 13 и 14 сравнения. Кроме того, в электропривод дополнительно введены два умнолсителя 21 и 22, одни входы которых подключены к выходам регуляторов 15 и 16 положения, а другие - к выходам датчиков скорости так, чтобы па выходе каждого умножителя получался результат умножения заданной скорости движения одного нажимного винта на текущую скорость другого нажимного винта; узел 23 сравнения, входы которого подключены к выходам умножителей, и знакораспределительное устройство, состоящее, например, из инвертора 24, вход которго подключен к выходу узла 23 сравнения, и двух поляризованных реле 25 и 26. Обмотка реле 25 подключена к выходу регулятора 16, а переключающий контакт 27 реле 25 - ко второму входу преобразователя 7. Переключающий контакт 28 реле 26 подключен ко второму входу преобразователя 8, а неподвижные одноименные контакты обоих реле объединены и подключены попарно ко входу и выходу инвертора 24 так, чтобы при параллельном движении обеспечивалась синхронизация электроприводов.
Дополнительное корректирующее устройство состоит из двух выпрямителей 29 и 30, двух блоков 31 и 32 деления и двух ограничителей 33 и 34. Входы выпрямителей 29 и 30 подключены к выходам узлов 13 и 14 сравнения, соответственно. Выход выпрямителя 29 подключен к блоку 31 как делимое и к блоку 32 как делитель. Выход выпрямителя 30 подключен к блоку 31 как делитель и к блоку 32 как делимое. Выходы блоков 31 и 32 деления через соответствующие ограничители 33 и 34 подключены к цепям регулирования отсечек в регуляторах 15 и 16 положеПИЯ.
Сущность изобретения заключается в соблюдении условия подобия переходных процессов двух позиционных следящих систем при ступенчатых задающих воздействиях и нулевых пачальных условиях
5 зад5
2 задS2
где 51зад И 52 зад - ступенчатые задания по перемещепию нажимных винтов;
5 и 52 - текущие рассогласования в моменты времени 0.
При равенстве передаточных чисел редукторов это условие может быть записано в виде
У.зад- 2 2зад 1Л, 13,1д макс
AS,
V
Ззад макс
где К1зад И 2зад - выходньш сигналы регуляторов положения, являющиеся заданными скоростями перемещения нажимных винтов; V к Vz - текущие скорости перемещения; A5i и Д52 - текущие рассогласования нажимных винтов;
А5 5зад- 5;
1 зад макс И 2 зад макс - ОТСеЧКИ ПО СКОрости.
Принцип действия электропривода основан на выравнивании перекрестных произведений заданных скоростей перемещения нажимных винтов на текущие скорости перемещения и регулирования отсечек по скорости в пропорции с текущими рассогласованиями нажимных винтов.
Электропривод работает следующим образом.
Сигнал а на суммарное перемещение нажимных винтов и сигнал б на перекос винтов подаются на входы задатчиков 19 и 20 перемещения, причем, если в задатчике 19 эти сигналы суммируются, то в задатчике 20 они
вычитаются. Длительность одного такта ступенчатого преобразования сигнала достаточна для того, чтобы за его время свободные движения в индивидуальных следящих системах электроприводов успевали закончиться.
Полученные ступенчатые задания виг отрабатываются следящими системами.
В умножителях 21 и 22 вычисляются произведения заданных скоростей перемещения дне пажимных винтов на текущие скорости
перемещения ж и з противоположных винтов. Произведения и, к сравниваются в узле 23, и полученная разность л через переключающие контакты 27 и 28 знакораспределительного устройства, состоящего из инвертора 24 и поляризованных реле 25 и 26, подаётся па дополнительные управляющпе входы преобразователей 7 и 8 так, что происходш 1)ыравпывапие сравниваемых произведений.
Текущие рассогласования м и н нажимных винтов выпрямляются выпрямителями 29 и 30, и полученные модули о и /г подаются на входы блоков 31 и 32 деления так, чтобы на выходе блока 31 получалось частное от деления модуля о на модуль п, а на выходе блока 32 - обратное частное- Сигналы с блоков деления поступают через ограничители 33 п 34 в регуляторы 15 и 16 перемещения, и ограничивают задания по скорости так, что максимально допустимая скорость перемещения пажпмного винта, имеющего больщее отклонение от заданного положения, равна номинальной скорости, а максимально допустимая скорость перемещения другого нажимного винта меньше номинальной скорости; при этом соблюдается прямая пропорция между максимальпо допустимыми скоростями перемещения и текущими рассогласованиями.
Результатом функционирования всей схемы является подобие траекторий движения нажимных винтов в копечиом интервале времени, равном такту ступенчатого преобразования заданий на перемещепне.
Формула изобретепия
1. Электропривод нажимных винтов прокатной клети, содержащий два электродвигателя, питающихся от индивидуальных регулируемых преобразователей, синхронизированные задатчики пс)е: ещсн11я со ступенчатым преобразованием сигнала и датчнкн положения, подключенные через блоки сравнения к регуляторам положения, выходы которых соединены с управляющими входами преобразователей, н датчики скорости, отличающийся тем, что, с целью обеспечения полной автономности суммарного перемещения винтов и их перекоса, в него введено корректирующее устройство, состоящее из двух умножителей, узла сравнения и знакораснределительного устройства, при этом на вход каждого из умножителей подключены выходы одного из регуляторов ноложения и датчика
скорости второго двигателя, а выходы умножителей через узел сравнения п знакораспределительное устройство связаны со входами преобразователей.
2. Электропривод по п. I, отличающийся
тем, что, с целью обеспечения полной автономности суммарного перемещения нажимных винтов и их перекоса при насыщении регуляторов положения, в него введено дополнительное корректирующее устройство, состоящее из двух выпрямителей, двух блоков деления и двух ограничителей, при этом входы выпрямителей подключены к выходам узлов сравнения, делимый вход каждого блока деления подсоединен к выходу своего выпрямителя, второй вход этого блока подключен к выходу другого выпрямителя, а выходы делнтельных устройств через соответствующие ограничители подсоединены к цепям отсечек регуляторов положения.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ограничения межклетевых натяжений на непрерывном прокатном стане | 1980 |
|
SU950459A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Следящий рулевой электропривод | 2022 |
|
RU2800527C1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399017C1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1986 |
|
SU1347139A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1988 |
|
SU1534738A2 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |