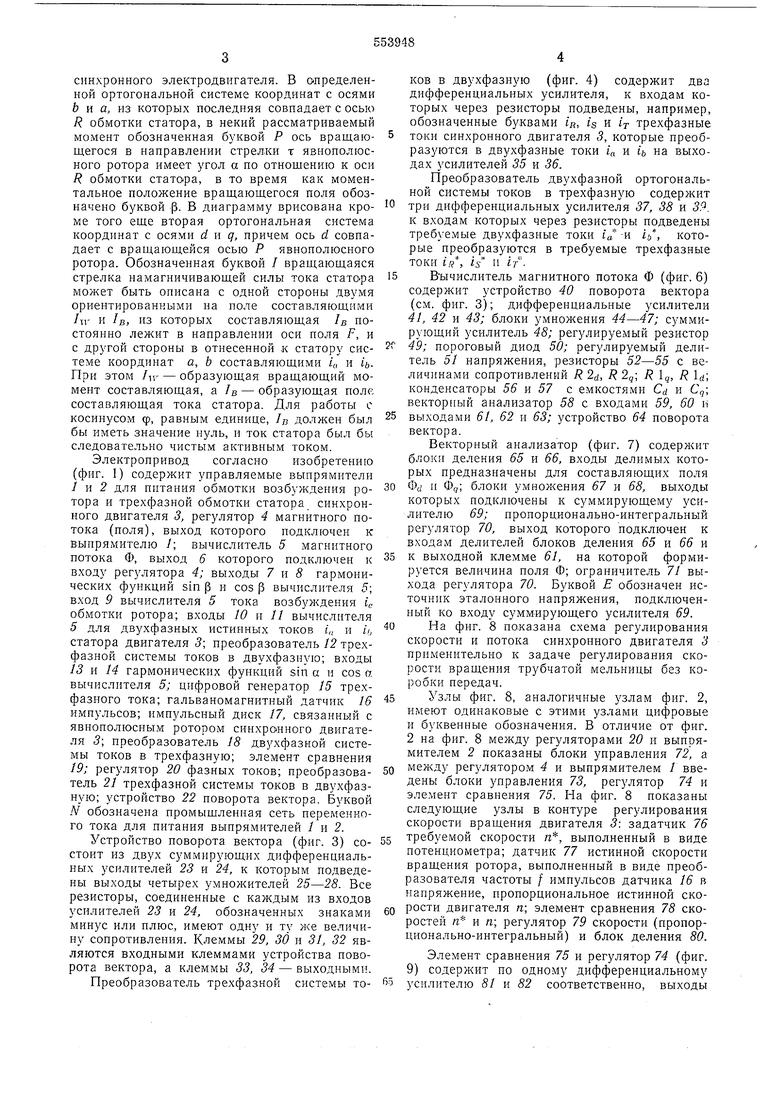
синхронного электродвигателя. В определенной ортогональной системе координат с осями b а, из которых последняя совпадает с осью R обмотки статора, в некий рассматриваемый момент обозначенная буквой Р ось вращающегося в направлении стрелки т явнополюсного ротора имеет угол а по отношению к оси R обмотки статора, в то время как моментальное положение вращающегося поля обозначено буквой р. В диаграмму врисована кроме того еще вторая ортогональная система координат с осями d и q, причем ось d совпадает с вращающейся осью Р явнополюсного ротора. Обозначенная буквой / вращающаяся стрелка намагничивающей силы тока статОра может быть описана с одной стороны двумя ориентированными на поле составляющими /1г и IB, из которых составляющая IB постоянно лежит в направлении оси поля F, и с другой стороны в отнесенной к статору сиетеме координат а, b составляющими /« и 1ь. При этом /1г - образующая вращающий момент составляющая, а /в - образующая поле составляющая тока статора. Для работы с косинусом ф, равным единице, /д должен был бы иметь значение нуль, и ток статора был бы следовательно чистым активным током. Электропривод согласно изобретению (фиг. 1) содержит управляемые выпрямители / и 2 для питания обмотки возбуждения ротора и трехфазной обмотки статора синхронного двигателя 3, регулятор 4 магнитного потока (поля), выход которого подключен к выпрямителю /; вычислитель 5 магнитного потока Ф, выход 6 которого подключен к входу регулятора 4; выходы 7 и S гармонических функций sin J3 и cos (5 вычислителя 5; вход 9 вычислителя 5 тока возбуждения te обмотки ротора; входы 10 и // вычислителя 5 для двухфазных истинных токов г„ и 1ь статора двигателя 5; преобразователь 12 трехфазной системы токов в двухфазную; входы 13 и 14 гармонических функций sin а и cos а вычислителя 5; цифровой генератор 15 трехфазного тока; гальваномагнитный датчик 16 импульсов; импзльсный диск 17, связанный с явнополюсным ротором синхронного двигателя 5; преобразователь 18 двухфазной системы токов в трехфазную; элемент сравнения 19; регулятор 20 фазных токов; преобразователь 21 трехфазной системы токов в двухфазную; устройство 22 поворота вектора. Буквой N обозначена промышленная сеть переменного тока для питания выпрямителей / и 2. Устройство поворота вектора (фиг. 3) состоит из двух суммирующих дифференциальных усилителей 23 и 24, к которым подведены выходы четырех умножителей 25-28. Все резисторы, соединенные с каждым из входов усплителей 23 и 24, обозначенных знаками минус или плюс, имеют одну и ту же величину сопротивления. Клеммы 29, 30 и 31, 32 являются входными клеммами устройства поворота вектора, а клеммы 33, 34 - выходными. Преобразователь трехфазной системы токов в двухфазную (фиг. 4) содержит два дифференциальных усилителя, к входам которых через резисторы под ведены, например, обозначенные буквами гл, is и IT трехфазные токи синхронного двигателя 5, которые преобразуются в двухфазные токи la и ib на выходах усилителей 35 и 36. Преобразователь двухфазной ортогональной системы токов в трехфазную содержит три дифференциальных усилителя 37, 38 и 39. к входам которых через резисторы подведены требуемые двухфазные токи ia -и /а, которые преобразуются в требуемые трехфазные токн , г/ ч г/. Вычислитель магнитного потока Ф (фиг. 6) содержит устройство 40 поворота вектора (см. фиг. 3); дифференциальные усилители 41, 42 и 43; блоки умножения 44-47; суммирующий усилитель 48; регулируемый резистор 49; пороговый диод 50; регулируемый делитель 51 напряжения, резисторы 52-55 с величинами сопротивлений Rid, Rig-, R q, R la, конденсаторы 56 и 57 с емкостями Cd и С,; векториый анализатор 58 с входами 59, 60 и выходами 61, 62 и 63; устройство 64 поворота вектора. Векторный анализатор (фиг. 7) содержит блоки деления 65 и 66, входы делимых котоРьгх предназначены для составляющих поля Фсг и Ф,; блоки умножения 67 и 68, выходы которых подключены к суммирующему усилителю 69; пропорционально-интегральный регулятор 70, выход которого подключен к входам делителей блоков деления 65 и бб и к выходной клемме 61, на которой фор мируется величина поля Ф; ограничитель 71 выхода регулятора 70. Буквой Е обозначен источник эталонного напряжения, подключенный ко входу суммирующего усилителя 69. На фиг. 8 по.казана схема регулирования скорости и потока синхронного двигателя 3 применительно к задаче регулирования скорости вращения трубчатой мельницы без коробки передач. Узлы фиг. 8, аналогичные узлам фиг. 2, и.меют одинаковые с этими узлами цифровые и буквенные обозначения. В отличие от фиг. 2 на фиг. 8 между регуляторами 20 и выпрямителем 2 показаны блоки управления 72, а жду регулятором 4 и выпрямителем / управления 75, регулятор 74 и элемент сравнения 75. На фиг. 8 показаны следующие узлы в контуре регулирования скорости вращения двигателя 3: задатчик 76 требуемой скорости л, выполненный в виде потенциометра; датчик 77 истинной скорости вращения ротора, выполненный в виде преобразователя частоты / импульсов датчика 16 в напряжение, пропорциональное истинной скорости двигателя «; элемент сравнения 78 скоР -ен и /г; регулятор 79 скорости (пропорционально-интегральный) и блок деления 80. Элемент сравнения 75 и регулятор 74 (фиг. 9) содержит по одному дифференциальному усилителю 81 и 82 соответственно, выходы которых обозначены цифрами 83 и 84. При этом в контуре обратной связи усилителя 82 применена цепь из последовательно соединенных конденсатора и резистора. Электропривод с синхронным двигателем работает следующим образом (фиг. 1). В .-вдс строприводе обеспечивается раздельное управление вращающим моментом и магнитным потоком синхронного двигателя 3 за счет регулирования тока возбуждения ig ротора и за счет регулирования составляющих тока статора Iw и /в (см. фиг. 1), ориентированных по оси F магнитного потока. В соответствии с этим входными величинами для привода фиг. 1 являются требуемое значение потока Ф и требуемые значения составляющих тока статора /w и IB- Для решения поставленной задачи в приводе осуществляются следующие изменения: измеряется ток возбуждения ig и сигнал, пропорциональный этому току, поступает на клемму 9 вычислителя 5; измеряются трехфазные токи статора IT, is и гд, которые преобразуются с помощью устройства 12 в двухфазные токи ta и гь (см. фиг. 2), а затем сигналы, пропорциональные токам ia и ib, поступают на входные клеммы 10 и J1 вычислителя 5; измеряется угловое положение а продольной оси d ротора относительно оси а статора (см. фиг. 2) и формируются гармонические функции sin а и cos а, которые поступают на входные клеммы 13 и 14 вычислителя 5. Формирование функций sin а и cos а происходит следующим образом. Цифровой генератор 15 трехфазного тока. состоящий по существу из счетчика, шагового переключателя, распределительного функционального устройства, а цифро-аналогового преобразователя, формирует на своем трехфазном выходе три сдвинутых по отношению друг к другу на 120° синусоидальных напряжения, длительность периода которых обратно пропорциональна частоте подводимой к его входу серии импульсов. На вход цифрового генератора 15 подаются импульсы с выхода гальваномагнитпого датчика 16, выполценного, например, в виде реагирующей на магнитное поле пластинки или датчика ЭДС Холла, который, в свою очередь, активируется импульсным диском 17. Диск связан с явнополюсным ротором синхронного двигателя 3, по окружности которого встроены на одинаковых расстояниях относительно д.руг друга маленькие постоянные магниты, количество которых составляет целое кратное число количества полюсов ротора синхронного двигателя . При вращении ротора импульсы от датчика 16 поступают на вход генератора 15, при этом число импульсов определяет угловое положение а ротора. Трехфазная система токов на выходе генератора 15, фаза которой определяется угловым положением а ротора, преобразуется с помощью устройства 21 (см. фиг. 4) в двухфазную систему токов, фаза которых также определяется углом а. Сигналы на выходах устройства 21 используются в качестве гармонических функций sin а и cos а. Все полученные в результате упомянутых выше измерений сигналы используются в качестве входных сигналов вычислителя 5, который предназначен для формирования величины потока /Ф/ и для определения гармонических функций sin р и cos р, характеризующих угловое положение оси F потока Ф относительно оси а (фазы R) статора. Как формируются указанные величины в вычислителе 5 рассмотрим несколько позже, а сейчас рассмотрим, как они используются в приводе (фиг. 1). Гармонические функции sin р и cos р используются для получения требуемых составляющих тока статора ia, i-b, которые в свою очередь преобразуются с помощью устройства 18 (см. фиг. 5) в требуемые трехфазные токи i-f, i/ и IK. Эти токи доллшы быть получены, так как регулирование токов статора ведется в фазных координатах, связанных со статором, т. е. каждый из токов ir, i/ и LK сравнивается в устройствах 19 с соответствующим истинным током tr, is и к фаз статора. Результаты сравнения через регуляторы 20 воздействуют на управляемый выпрямитель 2 и питают статор двигателя 3 требуемым по величине и фазе током / (см. фиг. 2). Преобразование составляющих тока статора и /л в составляющие ia и if, ведется устройством поворота вектора 22 (см. фиг. 3). Когда входная клемма 29 устройства соединена в соответствии с устройством фиг. 1 с образующей вращающий момент составляющей, т. е. с заданной вертикально к оси вращающегося поля составляющей заданной величины /iJ/ тОКа статора, а входная клемма 30 соединена с образующей поле составляющей, т. е. с заданной параллельно к оси вращающегося поля составляющей заданной величины // и гармоппчеса ие функции sin р и cos р присоединены к входным клеммам 31 и 32, па выходных клеммах 34 и 33 возникают напряжения, пропорциональные соответственно косинусу и синусу суммарного угла arctg При этом сумма квадратов их значений отвечает сумме квадратов входных величин /л и При таком присоединении устройство поворота вектора 22 поворачивает описанный величинами и IB входной вектор на угол Р вперед, т. е. образует следующпе, усматриваемые из фиг. 1, связи между отнесенными к полю и отнесенными к статору требуемыми значениями: ./ 3 - /,.17sin /ь IB sin 3 -L Д/ cos p. Принцип действия вычислителя 5 для определения гармонических функций sin |3 и cos р заключается в следующем. При построении вычислителя 5 употреблен метод Парка для разложения намагничивающих сил статора на две составляющие, которые считаются вращающимися вместе с ротором. В дальнейшем будет применяться индекс «d для составляющей, проходящей в направлении оси Р явнополюсного ротора (см. фиг. 2), и индекс «q для со-ставляющей, проходящей поперек осн явнополюсного ротора. Сначала в вычислителе 5 преобразуются две отнесенные к статору ортогональные составляющие тока статора i,, и Д посредством устройства поворота вектора 40, к входным клеммам которого 3 и 32 подведены две определяющие мгновенное положение явнополюсного ротора со-ставляющие sin а и cos а, в две соответствующие, но отнесенные к явнополюсному ротору составляющие тока id и iq, которые появляются на выходных клеммах 33 и 34. Техническое внутреннее построение устройства поворота вектора 40 соответствует уже описанному устройству поворота вектора 22, но входные величины г„ и г подводятся к входным клеммам 29 и 30 так, что, как помечено в блочном знаке устройства поворота вектора 40, вектор тока статора поворачивается на величину угла оси явнополюсного ротора а назад. При этом на выходных клеммах 33 и 34 возникают составляющие id и iq, описывающие вектор статора в системе координат d, q. Отнесенные к явнополюсному ротору составляющие тока статора la и iq подводятся к входам двух примененных для образования модели поля дифференциальных усилителей 42 и 43. Предусмо тренный для образования модели потока в продольном направлении оси явнополюсного ротора дифференциальный усилитель 42 питается дополнительно еще и пропорциоиальным току возбуждения током to который подведен через входную клемму 9 к вычислителю потока 5. Дифференциальный усилитель 42 имеет три цепи обратной связи: через резистор 55 , значение которого отвечает главной индуктивности Ld обмотки возбуждения поля; через последовательную цепь из резистора 52 и конденсатора 56, слулсащую для образования модели, относящейся к продольной оси демпфирующей цепи, а также через блок умножения 44, который предусмотрен для учета влияния насыщения. Если обозначить буквами rd омическое сопротивление демпфирующей цепи и буквами Id ее индукцию рассеяния, буквами R2(i омическое сопротивление и буквами Са ем.кость, осуществляющую отрицательную обратную связь дифференциального усилителя 42 последовательной схемы, можно показать, что при равенстве коэффициентов и ld R2d дифференциальf- d
ный усилитель 42 с его элементами обратной связи 55, 52 и 56 рещает дифференциальное
уравнение для проходящей в продольном направлении осн явнополюсного ротора составляющей Фd, которое в операционном способе d
написания { Р т имеет вид
Ihdird + pld)
Фd
idtie rd+p(ihd + id)
Для дифференциального усилителя 43 и проходящей поперек оси явнополюсного ротора составляющей поля Ф справедливо аналогичное уравнение с соответствующими значениями параметров поперечной оси. Валяным является то, что при этом способе образования модели поля для симулирования составляющих магнитного потока Фа и Фд требуется в каждом случае лищь один единственный усилитель, и все параметры обмотки возбуждения и обмотки демпфирования можно устанавливать независимо один от другого отдельными конструкционными элементами.
Для определения влияния насыщения соответствующие потокам продольной и поперечной осей выходные напряжения Ф и Фд обоих дифференциальных усилителей 42 и 43 возводятся в квадрат в каждом из блоков умиол ения 46 Я 47 и суммируются в усилителе 48, так что образуется квадрат значения вектора поля, составляемого из обеих составляющих поля Фй и Фд. Выход звена 48 воздействует через звено порогового значения на входы мультипликаторов блоков умножения
43 и 45, расположенных в дополнительной цепи обратной связи усилителей 42 и 43. Звено порогового значения состоит из усилителя 41, коэффициент усиления которого может устанавливаться посредством входного регулируемого резистора 49, и во входной цепи которого расположен имеющий предварительное напряжение пороговый диод 50. Катод этого диода подключеи к помещенному мелсду положительным и отрицательным напрял ниями регулируемому делителю напряжения 51. Одно из сопротивлений этого делителя напрял ения регулируется так, что им можно изменять высоту порога пропускания. К обоим другим входам блоков умнолсения 44
и 45 подключены выходные напрял ения дифференциальных усилителей 42 и 43. Выходные напрял ения этих блоков умножения действуют как отрицательная обратная связь на оба усилителя 42, 43 модели поля.
Принцип действия описанного влияния насыщения следующий. До определенного значения результирующего общего потока выходное напряжение усилителя 48 не достигает порога диода 50. При этом на входах
блоков умножения 44 и 45 напряжение равно нулю и отсутствуют сигналы отрицательной обратной связи с выходов блоков умножения 44 и 45. Это соответствует ненасыщенному состоянию синхронного двигателя 3. При перещагивании выще упомянутого порога чувствительности имеет место квадратичное изменение степени отрицательной обратной связи вследствие расположенных в цепях отрицательной обратной связи блоков умножения 44 и 45. Таким образом возможно определение действительных характеристик намагничивания, иричем изменением переменной части делителя напряжения можно устанавливать момент наступления насьвдения, а изменением величины сопротивления входного резистора 49 - изгиб кривой намагничивалия в области насыщения в широких пределах и в достаточной степени в соответствии с действительностью. Важным является при учете насыщения всегда исходить от векторной суммы обеих составляющих поля Фа и Ф-,. Отнесенные к явноиолюсному ротору напряжения составляющих поля Ф и Ф подводятся к входным клеммам 59 и 60 векторного анализатора 58, который имеет задачей образование на своей выходной клемме 61 напряжения, пропорционального величине вектора поля, а на своих выходных клеммах 62 и 63 напряжений, пропорциональных синусу и косинусу угла v между осью явноиолюсного ротора Р и осью магнитного потока F. Входами векторного анализатора являются входы делимых блоков 65 и 66. Сигналы с выходов блоков деления 65 и 66 возводятся в квадрат посредством блоков умножения 67 и 68, выходные сигналы которых в звене (69) суммируются между собой и вычитаются относительно нормированного сигнала Е, величина которого принимается за единицу. Сигнал с выхода звена (69) подается на вход пропорционально-интегрального регулятора 70, выход .которого соединен со входами делителей блоков деления 65 и 66. Пропорционально-интегральный регулятор получает из соображений стабильности ограничитель 71, например, в форме ограничительного диода, который опраничивает выходное напряжение интегратора с одной стороны иа нуль и допускает таким образом только положительные значения этого выходного напряЕсли выходная величина пропорционально-интегрального регулятора 70 будет обозначена буквой X и будет учтено, что выходная величина пропорционально-интегрального регулятора не изменится только тогда, когда сумма его входных величин исчезнет, то представленное на фиг. 7 устройство достигает стационарного, т. е. уравновещенного состояиия, при условии (Ф,/х)+{Ф,/х). Выходная величина интегратора отвечает в этом случае точно значению /Ф/ вектора вращающегося поля. При этом достигаемом автоматически стационарном состоянии возникают на соединенных с выходами блоках 65 и 66 клеммах 63 и 62 сигналы Ф . г smG, 7W--« на клемме 6 сигнал, пропорциональный веичине /Ф/. Сигналы на выходах 62 и 63 векорного анализатора 58 описывают в осях d q нормированный вектор, который соориенирован в направлении вектора вращающегоя магнитного поля. Посредством устройства оворота вектора 64, которое подключено со тороны входа тем же способом, что и устойство поворота вектора 22 и осуществляет оэтому поворот подключенного к его клеммам 29 и 30 вектора вперед, получаются в итоге на его выходных клеммах 34 и 35 два напряжения, которые пропорциональны косинусу и синусу угла р. Рассмотрим теперь в целом работу синхронного электропривода трубчатой мельницы (фиг. 8). В приводе имеется два канала регулирования: канал регулирования ско-рости ротора и канал регулирования магнитного потока синхронного двигателя 3. Напряжение с выхода задатчика скорости 76, пропорциональное заданной скорости п, сравнивается в элементе 78 с напряжением преобразователя 77, пропорциональным истинной скорости п ротора синхронного двигателя 3. . Результат сравнения через пропорционально-интегральный регулятор 79 поступает на вход делимОГО блока -80, на вход делителя которого поступает сигнал с клеммы 6 вычислителя 5, пропорциональный модулю магт нитного потока /Ф/. Выходной сигнал блока деления 80 используется в качестве одной из составляющих тока статора, ориентированных по полю. В частности, выходной сигнал блока 80, определяемыи выходным сигналом регулятора скорости 79, задает располол енную вертикально к оси вращающегося поля F составляющую требуемого значения v тока статора. Выходной сигнал регулятора - скорости 79 пропускается через блок 80 для того, чтобы сохранить неизменным коэффициент усиления в контуре регулирования скорости и тем самым исключить влияние канала регулирования потока на канал регулирования скорости в тех случаях, когда возможны изменения величины потока /Ф/ вектора вращающегося поля двигателя 3. Изменение величины /Ф/ будет происходить, например, при изменении заданного значения потока Ф. Таким образом, канал регулирования вращающегося момента, изображенный на фиг. 1, оказывается включенным в канал регулирования скорости привода по фиг. 8. При этом истинное значение скорости п получается путем преобразования числа импульсов датчика 16 в напрял ение в блоке 77. В канале регулирования магнитного потока результат сравнеЕшя сигналов, пропорциональных величинам /Ф/ и Ф, поступает на
11
вход пропорционально-интегрального регулятора 4, выходной сигнал которого играет роль сигнала задания тока возбуждения /е ротора. Сигналы, пропорциональные токам 4 и io (истинное значение тока возбуждения) сравниваются в элементе 75 и результат сравнения через регулятор 74 и блок управления 73 воздействует на выпрямитель 1, который питает обмотку возбуждения ротора током возбзждения 4Сигнал с выхода элемента сравнения 75 поступает на вход 30 устройства 22 и определяет расположенную параллельно оси поля F составляющую требуемого значения IB тока статора. Если истинная скорость п не соответствует заданной скорости п, то возникает сигнал Iw, который определяет величину момента на валу привода, который в свою очередь стремится изменить скорость нагрузки до значения, равного заданному значению п.
Примененное в рассмотренном изобретении ориентированное на поле задание составляющих тока статора дает возможность как бы уменьшить значительн}ю постоянную времени в контуре регулирования тока возбуждения при толчках нагрузки, т. е. пр.и переходе из одного стационарного состояния в другое, и достигнуть этим более быстрого протекания переходного процесса, а также избежать нежелательных перенапряжений на обмотка-х двигателя. Для этого подлежащее все равно устранению посредством регулятора тока возбуждения 74 регзлировочное отклонение на его входе используется в качестве сигнала задания параллельной к пол.ю составляющей тока статора /в. В установившемся режиме входная величина регулятора тока возбуждения 74 равна нулю. Поэтому равна нулю и составляющая тока статора IB, и синхронный двигатель работает с косинусом ф, близким к единице. Если же возникает, например, вследствие толчков нагрузки, временное понижение или повышение магнитного потока электродвигателя, которое рег лятор магнитного потока стремится скомпенсировать, однако действует вследствие сравнительно высокой инертности подчиненной ему цепи рег лирования тока возбуждения недостаточно быстро, то на входе регулятора тока возбуждения возникает временное регулировочное отклонение, которое вызывает через вход SO устройства поворота вектора 22 параллельную к полю составляющую тока статора, действующую в том же направлении, что и выходной сигнал регулятора тока воз12
буждения 74, и таким образом регуляторы в статорной цепи начинают помогать регулятору тока возбуждения, благодаря чему достигается высокое быстродействие.
Из рассмотрения работы привода с синхронным двигателем следует, что этот привод обладает более высокими динамическими свойствами, чем известные приводы с синхронными двигателями. Привод может быть использован для регулирования скорости вращения нагрузки без коробки передач, в частности нагрузкой привода может служить трубчатая мельница. В этом случае ротор синхрОНного двигателя целесообразно выполнять как единое целое с мелющим барабаном мельницы.
Формула изобретения
1.Электропривод с синхронным двигателем, содержащий блоки прямого и обратного преобразования, вычислитель магнитного потока с двумя операционными зсилителями, регзлятор скорости, выход которого подключен через делительное устройство к блоку прямого преобразования, датчик гармонических функций, аргументом котОрых является угловое положение продольной оси ротора двигателя, регулятор тока возбуждения ротора, отличающийся тем, что, с целью улучщения динамических характеристик электропривода, выходы операционных усилителей подключены к введенному анализатору вектора, выходы которого подсоединены к блоку прямого преобразования через делительное устройство и дополнительный блок прямого преобразования, подключенный к датчику гармонических функций, при этом вход регулятора тока возбуждения ротора соединен со входом блока прямого преобразования.
2.Электропривод по п. 1, о т л и ч а toщ и и с я тем, что, с целью улучшения динамических характеристик электропривода с синхронным двигателем с демпфирующими обмотками, операционные усилители содержат контур обратной отрицательной связи, состоящий из последовательно соединенных резистора и конденсатора.
Источники информации, принятые во внимание при экспертизе:
1.Заявка N° 1398754, по которой имеется решение о выдаче авторского свидетельства.
2.Stemmber Н. Antriebssystem und elektronische Regeleinrichtung der getriebelosen Rohrmuhle, «Brown Boveri Mitt, 1976, 3.
77




| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПРИ МИНИМИЗАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2024 |
|
RU2829487C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |

a.
Риг 2
