Изобретение относится к силоизмерительной технике, а именно к устройствам для тарировки и проверки динамометрических приборов и может быть применено на предприятиях медицинской промышленности для тарировки и проверки медицинских динамометрических приборов.
Известные устройства для тарировки и нроверки динамометрических приборов, содержащие механизм положения гирь, включающий наборы унифицированных грузов, и механизм отработки задаваемой деформации, выполненный в виде платформы, перемещаемой по направляющим, и опорных площадок, на которых размещаются наборы унифицированных грузов механизма положения гирь, имеют недостаточные точность и диапазон.
Для повышения точности и расщирения диапазона тарировки и проверки предлагаемое устройство снабжено компенсатором, механизмом плавающего базирования и нагружения, связанного с механизмом наложения гирь, причем компенсатор связан с механизмом плавающего базирования и нагружения, а механизм наложения гирь - с механизмом отработки задаваемой деформации.
Механизм плавающего базирования и нагружения выполнен в виде нризмы, самоустанавливающейся на динамометрическом приборе, и обоймы, к которой с помощью системы цилиндрических пружин через сферическую опору поджата призма. Компенсатор выполнен в виде противовеса, свободно подвешейного на тонкой нерастяжимой нити, перекинутой через подвижный шкив, и гибко связанного с обоймой механизма плавающего базирования и нагружения.
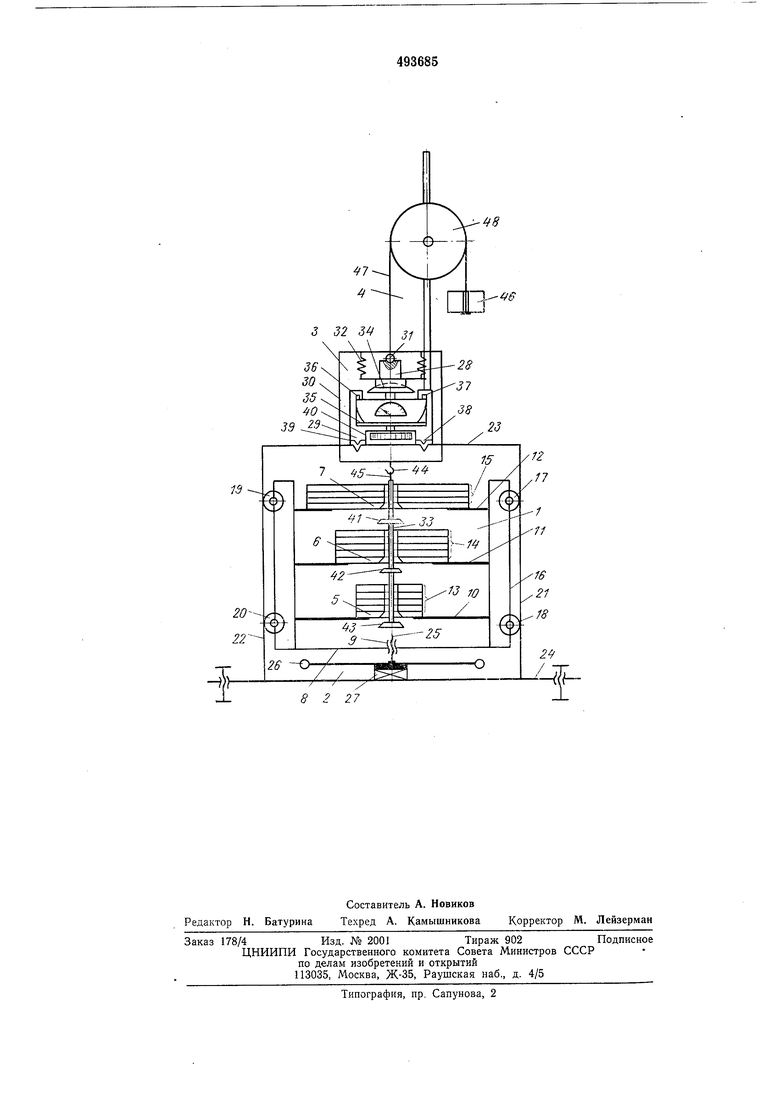
На чертеже показано устройство для тарировки и проверки динамометрических приборов.
Устройство для тарировки и проверки динамометрических приборов содержит механизм 1 Наложения гирь, механизм 2 отработки задаваемой деформации, механизм 3 плавающего базирования и нагружения и компенсатор 4. Механизм 1 наложения гирь, состоит из
грузов 5, 6 и 7, платформы 8 с винтовым отверстием 9, опорных площадок 10, 11 и 12. Механизм 1 наложения гирь включает в себя также наборы легкосъел ных унифицированных грузов 13, 14 и 15 различной массы, размещенных на соответствующих груза
5, 6 и 7, и установленных на опорных площадках 10, 11 и 12 платформы 8; платформу
16, неразъемно связанную с платформой 8;
ролики 17, 18, 19, 20; направляющие 21 и 22;
верхнюю плиту 23 и нижнюю плиту 24, причем направляющие 21 и 22 жестко зафиксированы между плитами 23 и 24. .
Механизм 2 отработки задаваемой деформации состоит из винта 25, маховика 26, упорного шарикоподшипника 27, неподвижно закрепленного на нижней плите 24 механизма 1 наложения гирь, винтовое отверстие 9 Которого и винт 25 механизма отработки задаваемой деформации образуют упорную винтовую пару и обеспечивают вертикальное перемещение механизма наложения гирь относительно механизма отработки задаваемой деформации.
Механизм 3 плавающего базиро.вания и нагружения состоит из призмы 28, контактирующей € проверяемым динамометрическим прибором, съемной рамки 29, обоймы 30, сферической опоры 31, системы 32 цилиндрических пружин и регулятора 33 перемещения. Механизм 3 плавающего базирования и нагружения посредством регулятора перемещения связан с механизмом наложения гирь.
Призма 28 выполнена в виде упора с поверхностью 34, по которой он поджимается к динамометрическиму прибору. Достижение эластичного поджима призмы 28 к обойме
30и регулировка обеспечиваются сферической опорой 31 и системой 32 цилиндрических пружки.
В съемной рамке 29 установлена плоская пружина 35, упоры 36, 37, выступы 38, 39 и винт 40. Регулятор 33 перемещения выполнен в виде резьбового стержня, упоров 41, 42, 43 и прикрепляется к обойме 30 захватами 44 и 45.
Компенсатор 4 состоит из противовеса 46, свободно подвешенного на упругой нерастяжимой нити 47, перекинутой через подвижный шкив 48 и прикрепленной к обойме 30 механизма 3 плавающего базирования и нагружения, уравновешивая последний.
Динамометрический прибор устанавливается в съемной рамке 29 механизма 3 плавающего базирования и нагружения. Поворотом винта 40 плоская пружина 35 поджимает динамометрический прибор к упорам 36 и 37 и фиксирует его положение в съемной рамке 29, которая устанавливается на верхней плите 23 механизма 1 наложения гирь на выступах 38 и 39. Поверхностью 34 призма 28 устанавливается на динамометрический прибор и связывается через сферическую опору 31 и систему 32 пружин с обоймой 30. Компенсация массы обоймы 30 и связанных с ней регулятора 33 перемещения, призмы 28, сферической опоры
31и системы 32 пружин достигается уравновешиванием их общей массы противовесом 46, подвешенным на нерастяжимой нити 47, перекинутой через подвижный шкив 48. Поворотом маховика 26 установленный в упорном шарикоподшипнике 27 винт 25 поворачивается в винтовом отверстии 9 плиты 24 механизма наложения гирь, и платформа 16 совершает поступательное вертикальное перемещение на роликах 17, 18, 19 и 20 по направляющим 21 II 22. Установленные на опорных площадках 10, И, 12, платформы 8 и грузы 5, 6, 7 или наборы унифицированных
легкосъемных грузов 13, 14, 15 различной массы перемещаются до тех пор, пока соответствующие грузы или наборы унифицированных легкосъемных грузов не окажутся поочередно подвешенными на упорах 41, 42 и
43 регулятора 33 перемещения. Подъем грузов или их наборов от каждой опорной площадки 10, 11, 12 характеризует требуемую точку тарировки или проверки динамометрического прибора.
Снабжением устройства механизмом плавающего базирования и нагружения и компенсатором, кроме повышения точности и расширения диапазона тарировки и проверки динамометрических приборов, обеспечивается плавающая самоустановка нагружающего усилия и его фиксация на динамометрических приборах.
Предмет изобретения
1.Устройство для тарировки и проверки динамометрических приборов, содержащее механизм наложения гирь, включающий наборы унифицированных грузов, и механизм
отработки задаваемой деформации, выполненный в виде упорной и винтовой пары, отличающееся тем, что, с целью повышения точности и расширения диапазона тарировки и проверки, оно снабжено компенсатором, механизмом плавающего базирования и нагруження, связанного с механизмом наложения гнрь, причем компенсатор связан с механизмом плавающего базирования и нагруження, а механизм наложения гирь, - с механизмом
отработки задаваемой деформации.
2.Устройство по п. 1, отличающееся тем, что механизм плавающего базирования и нагружения выполнен в виде призмы, самоустанавливающейся па динамометрическом
приборе, и обоймы, к которой с помощью системы цилиндрических пружин через сферическую опору поджата призма.
3.Устройство по п. 1, отличающееся тем, что компенсатор выполнен в виде противовеса, свободно подвешенного на тонкой нерастяжимой нити, перекинутой через подвижный ш.кив, и гибко связанного с обоймой механизма плавающего базирования и нагружения.
19
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ-ГИРЕВИКОВ | 2002 |
|
RU2242261C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ТИКСОТРОПНЫХ СВОЙСТВ МАТЕРИАЛОВ | 1991 |
|
RU2011959C1 |
| Градуировочное устройство для весовых монометров | 1975 |
|
SU554475A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПОВЕРКИ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК СТАБИЛОМЕТРИЧЕСКОЙ ПЛАТФОРМЫ | 2004 |
|
RU2266705C1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| УСТАНОВКА ДЛЯ ОПРЕДЕЛЕНИЯ РЕОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 2020 |
|
RU2745536C1 |
| Устройство для наложения грузовНА бОльшЕгРузНыЕ ВЕСы | 1978 |
|
SU794386A1 |
| Многокомпонентное нагружающее устройство | 1984 |
|
SU1190222A1 |
| Устройство для аттестации большегрузных образцовых гирь | 1979 |
|
SU773444A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ СИЛЫ СЦЕПЛЕНИЯ МЕЛКОДИСПЕРСНЫХ МАТЕРИАЛОВ | 1973 |
|
SU404001A1 |