1
Изобретение может использоваться в арматуростроении.
Известны двухпозиционные электромаг- , нитные приводы клапанов, содержащие постоянный магнит и устройство для снижения g усилия удержания в момент срабатывания.
Однако известные приводы требуют наличия вспомогательные обмоток. Это увеличит; вает габариты привода, его вес и усложняет конструкцию. : ю
Цель изобретения - уменьшение габари- i тов, веса и упрощение конструкции.
Для этого устройство для снижения усилия удержания в момент срабатывания вы- . полнено в виде сопротивления, последователь.5 носоединенного с одной из обмоток управления, и параллельно - с другой.|
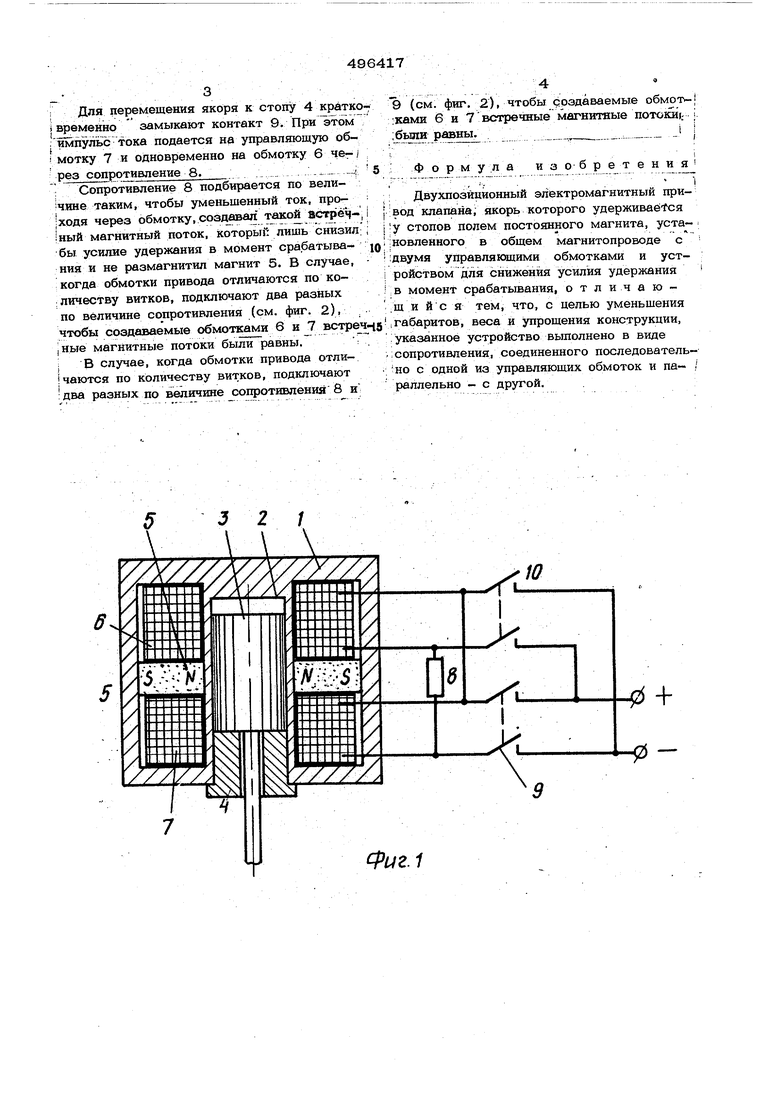
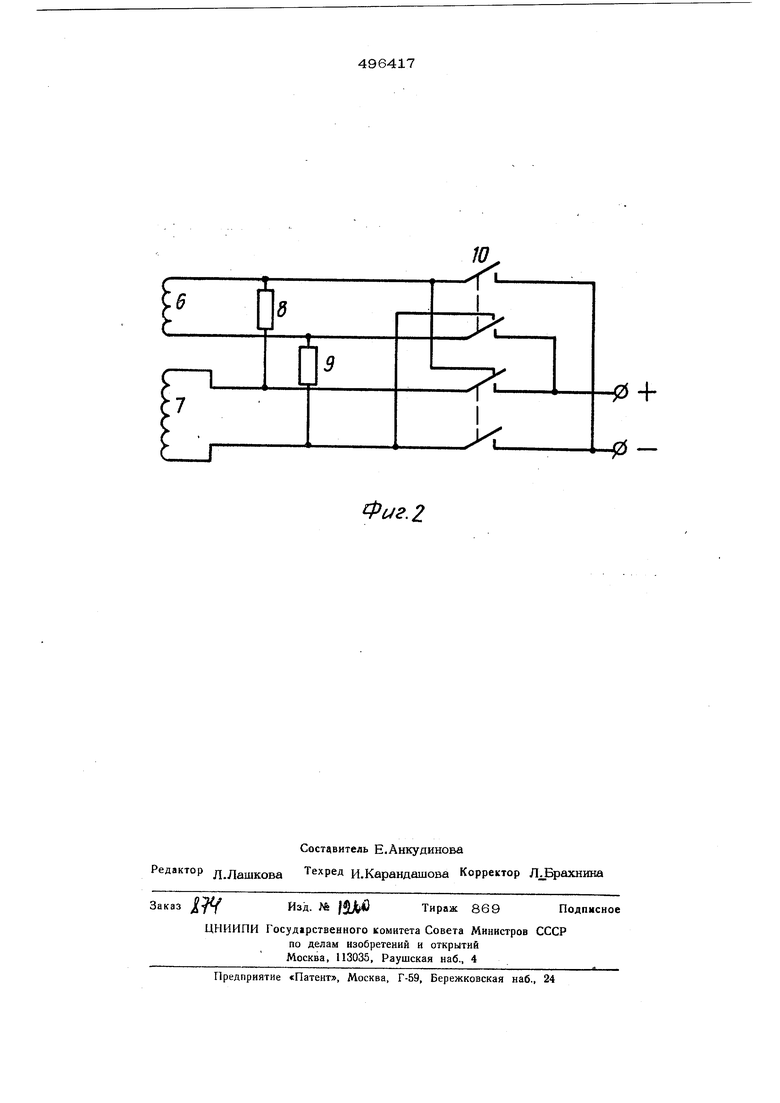
На фиг. 1 изображены привод, гфодольнь/й разрез, и схема управления при одинаковых jобмотках управления; на фиг. 2 - схема 20 (управления приводом при разных обмотках управления.
1 Привод включает магнитопровод 1 со сто:пом 2, якорь 3, закладной стоп 4, постоян НЬ1Й магнит 5, расположенный между двумя 25
управляющими обмотками 6 и 7, сопротивления 8 и контакты 9 и 10.
Привод работает следующим образом. При обеспеченных обмотках якорь 3 удерживается у одного из стопов (например у стопа 4), за счет магнитного потока постоянного магнита.
Для перемещения якоря 3 к стопу 2 подают импульс -постоянного тока на обмотку управления 6 кратковременным замыканием контакта 10. При этом одновременно импульс подается через сопротивление 8 на другую обмотку управления 7. )Магнитный поток, возбуждаемый обмоткой управления 6, дает тяговое усилие в направлении стопа 2, а поток, создаваемый обмоткой 7, включенной через Сопротивление 8, направлен встречно потоку постоянного магнита 5 и тем самым снижает усилие удержания якоря 3 у стопа 4 в момент срабатывания. ,
При достижении якоря 3 стопа 2 происходит переброс потока магнита 5 и при обеспеченных обмотках якорь удерживается у ; стопа 2.
i Для церемещения якоря к стопу 4 кратко-; 1 временно замыкают контакт 9. При этом Гимпульстока подается на управляющую обi мотку 7 и одновременно на обмотку 6 че-j
рез сопротивление в. ,. 5
; Сопротивление 8 подбирается по велиhirae таким, чтобы уменьшенный ток, проходя через обмотку, создавал такой асггрёч-, I Iный магнитный поток, который лишь снизил; i бы усилие удержания в момент срабатыва JQ ния и не размагнитил магнит 5. В случае, когда обмотки привода отличаются по ко: личеству витков, подключают два разных;
по величине сопротивления (см. фиг. 2), чтобы создазааемые обмотками 6 и 7 встречав |Ные магнитные потоки были равны. .
В случае, когда обмотки привода отличаются по количеству витков, подключают ; два разных по величине сопротивления 8 и
(см. фиг, 2), чтобы создаваемые oGMOTv :ками 6 и 7 встречные магнитные потоки :быг1и .
.
Фор м у л а изобретения
:,;
; Двухпозйционный электромагнитный привод клапана, якорь которого удерживаемся у стопов полем посто5шного магнита, уста:новленного в общем магнитопроводе с : двумя управляющими обмотками и устройством для снижения усилия удержания в момент срабатывания, отличаю.щ и и с я тем, что, с целью уменьшения /габаритов, веса и упрощения конструкции, ;указанное устройство выполнено в виде ;сопротивления, соединенного последовательно с одной из управляющих обмоток и параллельно - с другой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |
| Электромагнит лентопротяжного механизма видеомагнитофона | 1989 |
|
SU1725269A1 |
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОЛЯРИЗОВАННЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2015 |
|
RU2599625C1 |
| Способ управления поляризованным электромагнитом | 1981 |
|
SU1072134A1 |
| КЛАПАН ЭЛЕКТРОМАГНИТНЫЙ НОРМАЛЬНО ЗАКРЫТЫЙ | 2020 |
|
RU2752959C1 |
| БИСТАБИЛЬНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2011 |
|
RU2547815C2 |
| Магнитоэлектрический датчик момента | 1978 |
|
SU892592A1 |
| Поляризованный электромагнитный переключатель | 1981 |
|
SU983807A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТНЫЙ МЕХАНИЗМ БРОНЕВОГО ТИПА | 2002 |
|
RU2215162C1 |
3 г /
0 + 0Фиг. 2
