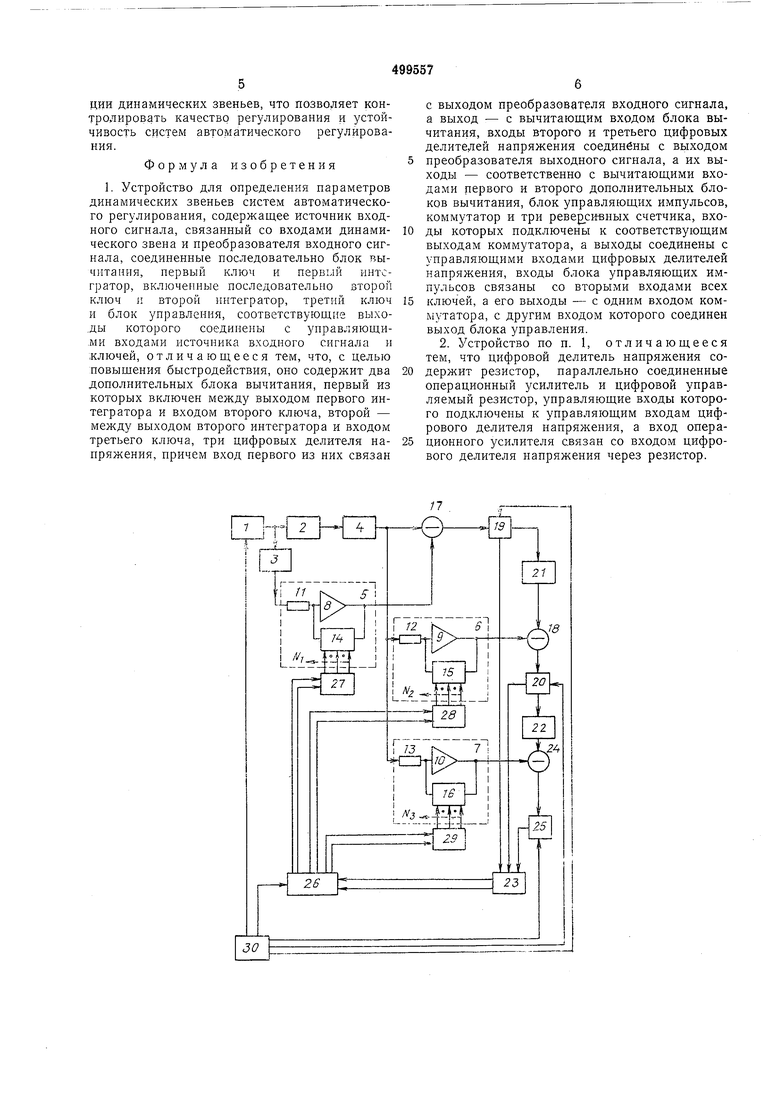
сигнала 3 и преобразователь выходного сигнала 4. Цифровые делители напрял ения 5, 6 и 7 состоят из операционных усилителей 8, 9 и 10, на входах которых включены резисторы И, 12 и 13, а в цепях обратной связи включены цифровые управляемые резисторы 14, 15 и 16. Выходы блоков вычитания 17 и 18 через ключи 19 и 20 связаны со входами интеграторов 21 и 22 и входами блока управляющих импульсов 23. Выход блока вычитания 24 через ключ 25 связан также с одним из входов блока 23, выходы которого через коммутатор 26 связаны со входами реверсивных счетчиков 27, 28 и 29. Блок управления 30 управляет ключами 19, 20 и 25, коммутатором 26 и источником входного сигнала 1. На выходах реверсивных счетчиков 27, 28 и 29 показаны цифровые коды, пропорциональные определяемым параметрам. Работа устройства заключается в следующем. Динамическое звено 2 описывается дифференциальным уравнением второго порядка с постоянными коэффициентами «оУ + а,у + y kx. X - входной сигнал; у - выходной сигнал динамического ао, uik - параметры, подлежащие определению. Преобразователи входного и выходного сигналов 3 и 4 преобразуют сигналы х vi у ъ напряжения - П,Х, бвых где т1И/П2 - коэффициенты преобразования. В первом такте блок управления 30 вырабатывает сигнал, запускающий источник входного сигнала 1, а также с помощью ключа 19 переключает выход блока вычитания 17 на вход блока управляющих импульсов 23. Блок 23 усиливает сигнал рассогласования и в зависимости от его знака выдает импульсы по одному из выходов, которые в первом такте через коммутатор 26 подключены к управляющим входам реверсивного счетчика 27. В результате через время tu выполняется равенстВО /вых(. где tu - время достижений установившегося значения выходным сигналом, /(i - коэффициент передачи цифрового делителя напряжения 5, определяемый выражением д- - 1 где Ry-максимальное значение сопротивления цифрового управляемого резистора 14; R - сопротивление резистора 11 на входе операционного усилителя 8; - цифровой код в реверсивном счетчике 27; - максимальная величина цифрового Отсюда следует, что через время tu, в установившемся режиме можно определить Иа аЛмакс Во втором такте вырабатывается также входной сигнал, выход блока 17 через ключ 19 подключается ко входу интегратора 21, а выход блока 18 через ключ 20 подключается ко входу блока управляющих импульсов 23, выходы которого коммутируются на входы реверсивного счетчика 28 через коммутатор 26. Реверсивный счетчик 27 заномипает код ;Vi, соответствующий параметру k. Цепь управления коэффициентом передачи KZ цифрового управляемого делителя напряжения 6 отрабатывает равенство ЛО-А.вых, откуда следует RoTi где 12 - сопротивление резистора 12; yVg - цифровой код в реверсивном счетчике 28; TI - постоянная времени интегратора 21. В третьем такте блок управления 30 переключает выход блока 18 через ключ 20 на вход интегратора 22, а выход блока 24 через ключ 25 подключается ко входу блока 23, выход которого коммутируется на вход реверсивного счетчика 29 через коммутатор 26. Реверсивный счетчик 28 находится в режиме хранения кода. Управление коэффициентом передачи Кз цифрового управляемого делителя напряжеПИЯ 7 происходит до выполнения равенства /7,(0-,внх(/). Следовательно, а - /V о - где - сопротивление резистора 13; - цифровой код в реверсивном счетчике 29. Таким образом, после трех тактов через время все параметры исследуемого динамического звена 2 определяются цифровыми кодами NI, NZ и Лз в соответствующих реверсивных счетчиках. Применение в предлагаемом устройстве цифровых управляемых деталей напряжения, частота переключения которых значительно выще полосы пропускания исследуемого динамического звена, позволяет повысить быстродействие устройства. Получение параметров в цифровом коде облегчает сопряжение устройства с регистрирующим прибором, например цифро-печатающим устройством. С помощью предлагаемого устройства можно экспериментально определять передаточные функ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров динамических звеньев систем автоматического регулирования | 1981 |
|
SU1004981A2 |
| Аналого-цифровой преобразователь интегральных характеристик электрических величин | 1981 |
|
SU1035790A1 |
| Интегратор | 1988 |
|
SU1728871A1 |
| Способ аналого-цифрового преобразования с весовым интегрированием и устройство для его реализации | 1981 |
|
SU953722A1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| Цифровой измеритель температуры | 1988 |
|
SU1560987A1 |
| Цифровой измеритель температуры | 1986 |
|
SU1364910A1 |
| Квазиуравновешенный мост для раздельного измерения одного из параметров нерезонансных трехэлементных двухполюсников | 1981 |
|
SU978054A1 |
| Аналого-цифровой преобразователь с промежуточным преобразованием в частоту | 1987 |
|
SU1441479A1 |
| Цифровой измеритель мощности | 1979 |
|
SU815658A1 |
