1
Изобретение относится к захватным приспособлениям для укладки и стыковки труб различного диаметра.
Известны манипуляторы для укладки и стыковки труб, содержаН1ие подвесной корпус и захваты.
Цель изобретения - упрощение конструкции манипулятора и расширение области его применения.
Для этого подвесной корпус выполнен телескопическим из двух сочлененных между собой труб, причем на наружной поверхности внутренней трубы в зоне сочленения жестко прикреплены двухрядные спиральные ребра с правым и левым направлением спирали, а на внутренней поверхности наружной трубы корпуса радиально прикреплены штифты в количестве, равном числу спиральных ребер внутренней трубы, захваты, входящие в направляющие кожухи, выполнены Т-образными с фасонными вырезами с наружной стороны и шарпирно присоединены к внутренней трубе корпуса с регулируемой перемычкой между ними, а внутри направляющих кожухов жестко прикреплены два выступа, отклоняющие захваты при выходе из кожухов.
Для обеспечения автоматической работы при поворотах наружной трубы корпуса к ее фланцам прикреплен крюк, а к стенкам внутренней трубы прикреплены под углом 120°
три скобы: одна жестко и две с возможност11Ю продольного перемещения.
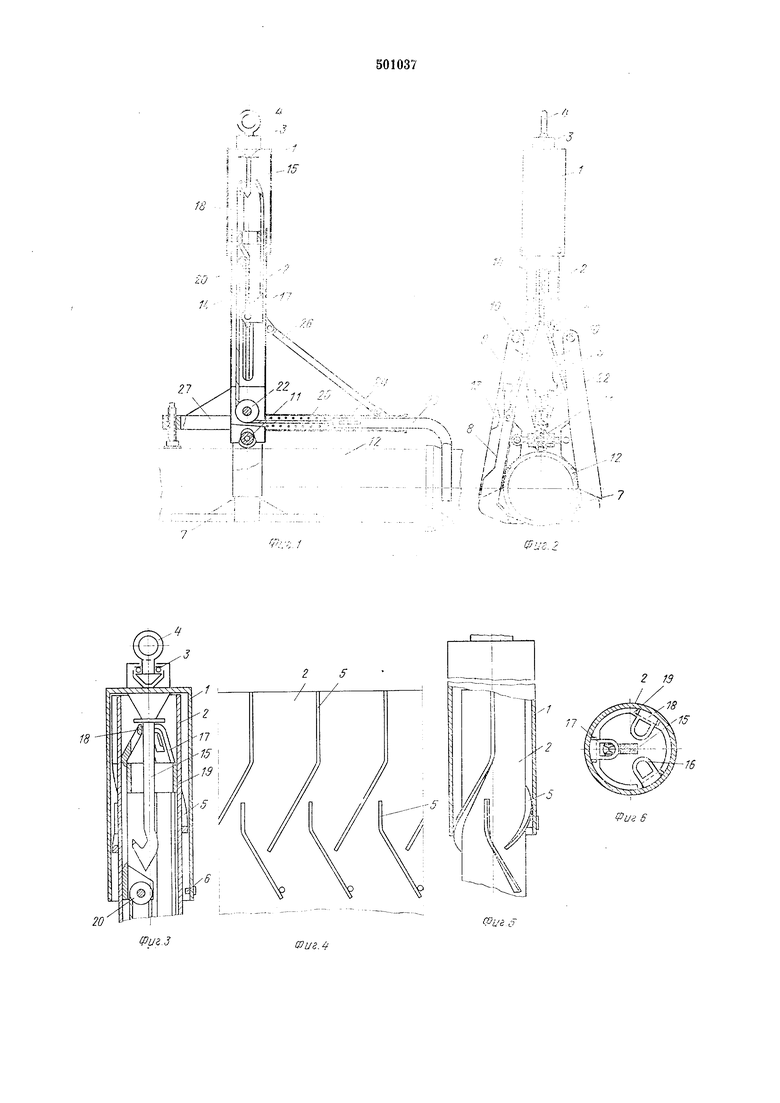
На фиг. I изображен предлагаемый манипулятор, продольный разрез; на фиг. 2 - то же,
поперечный разрез; на фиг. 3 - подвесной Kfjpnyc, продольный разрез; на фиг. 4 - внутренняя труба корпуса с двухрядными ребрами, развертка; на фиг. 5 - наружная труба корпуса с видом на двухрядные спиральные
ребра, разрез; на фиг. 6 - подвесной корпус с видом скобы, поперечный разрез.
Корпус манинулятора выполнен телескопическим из двух сочлененных труб, наружноГ 1 и внутренней 2. С наружной стороны днипич
трубы 1 смонтировано па упорном шариковом подшипнике 3 подвесное кольцо 4, за которое манипулятор подвешивается к крану. На наружной поверхности трубы 2 прикреплены двухрядные спиральные ребра 5 с правым и
левым направлением спирали. На внутренней поверхности трубы 1 радиально прикреплены щтифты 6 в количестве, равном числу спиральных ребер 5 на трубе 2.
В нижней части манипулятора смонтированы Т-образные захваты 7 с фасонными вырезами 8 с наружной стороны. Захваты 7 входят в направляющие кожухи 9, которые с помощью шарниров 10 в верху присоединены к трубе 2. В средней части кожухи 9 соединены
регулируемой перемычкой 11, позволяющей
расставлять захваты 7 на различные диаметры укладываемых труб 12. Внутри направляющих кожухов 9 жестко прикреплены два выступа 13, отклоняющие посредством каната
14захваты 7 при выходе их из кожухов 9. Для автоматической работы манипулятора при поворотах трубы 1 к ее днищу с внутренней стороны прикреплен крюк 15, а к стенкам трубы 2 под углом 120° - три скобы 16-18. Скоба 16 прикреплена жестко, скобы 17 и 18 - с возможностью продольного перемещения в пазах направляющей кольца 19.
К нижней части скобы 17 жестко прикреплены щеки, к которым на валу монтируют блок 20. Через блок 20 проходит канат 14, один конец которого соединен валиком с нижней частью скобы 18 и тягами 21 с захватами 7. Другой конец каната 14 пропущен через блок 22, сидящий на валу, смонтированном R нижней части трубы 2, и прикреплен к стыковочной вилке 23, телескопически сочлененной с трубой 24, имеющей внутри пружину 25 и поддерживаемой шарнирной тягой 26. Со стороны, противоположной расположению стыковочной вилки, к трубе 2 на кронщтейне 27 установлен упорный випт с возможностью регулирования захватов 7 па трубы различного диаметра.
Манипулятор работает следуюншм образом.
Ма}1ипулятор с помощью кольца 4 подвешиБается па крюке в положении, когда крюк 15 зацеплен за проушину скобы 16, жестко прикрепленную к трубе 2. В таком положении манипулятор с разомкнутыми захватами 7 опускается на укладываемую трубу 12. При опускании манипулятора подвесная труба 1 корпуса также опускается вниз, выводит крюк
15из проушины скобы 16 и, воздействуя штифтами 6 на нижние ребра 5, поворачивается на некоторый угол. При последующем подъеме манипулятора сначала поднимается труба 1, затем с помощью штифтов 6, воздействующих на верхние ребра 5, труба доворачивается до угла 120°. При этом крюк 15 входит в проушину скобы 17 и при дальнейшем подъеме через тяги 21 захваты 7 к укладываемой трубе 12. Затем манипулятор вместе с трубой 12 опускается в траншею.
хЦля выполнения стыковки секций труб производится манипуляция опускание - подъем наружной трубы 1. При этом штифты 6, взаимодействуя со спиральными ребрами 5 внутреппей трубы 2, поворачивают наружную трубу 1, крюк 15 входит в проушину скобы 18 и поднимает блок 20, вследствие чего происходит натяжение каната 4, которое передается через блок 22 на стыковочную вилку 23.
После стыковки производится опускание- подъем наружной трубы 1, при этом крюк 15 выходит из зацепления с проушиной скобы 18, труба поворачивается на угол 120°, и крюк 15 затем входит в зацепление с проушиной скобы 16. При дальнейшем подъеме манипулятора захваты 7 раздвигаются и освобождают уложенную трубу 12.
Затем цикл повторяется.
Формула изобретения
1.Манипулятор для укладки и стыковки труб, включающий подвесной корпус и захваты, отличающийся тем, что, с целью упрощения конструкции и расширения области применения, подвесной корпус выполнен те.тескопическим, из двух сочлененных между собой труб, причем па наружной поверхности внутренней трубы в зоне сочленения жестко прикреплены двухрядные спиральные ребра с правым и левы.м паправлением спирали, а на внутренней поверхности наружной трубы корпуса радиально прикреплены штифты в количестве, равном числу спиральных ребер внутренней трубы, захваты, входящие в направляющие кожухи, выполнены Т-образными с фасонными вырезами с наружной стороны и щарнирно присоединены к внутренней трубе корпуса с регулируемой перемычкой между ними, а внутри направляющих кожухов жестко прикреплены два выступа, отклоняющие захваты при выходе их из кожухов.
2.Манипулятор по п. 1, отличающийс я тем, что, с целью обеспечения автоматической работы при поворотах наружной трубы корпуса, к ее фланцам прикреплен крюк, а к стенкам внутренней трубы прикреплены под углом 120° три скобы: одна жестко и две с возможностью продольного перемещения.
7/
. /Т
-: - J I t
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАЗРУШЕННЫХ ГЛУБИННЫХ ТРУБОПРОВОДОВ | 2010 |
|
RU2468274C2 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |
| УСТРОЙСТВО С СОЧЛЕНЕННЫМ МАНИПУЛЯТОРОМ ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ПРОДУКТОВ, В ЧАСТНОСТИ ТЕКУЧИХ ПРОДУКТОВ | 2001 |
|
RU2274579C2 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ПАКЕТОВ ДЛИННОМЕРНЫХ МАТЕРИАЛОВ | 1996 |
|
RU2105704C1 |
| ПЕРЕНОСНОЙ ПРОТИВОТАНКОВЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ УСТАНОВКИ КОНТЕЙНЕРА С РАКЕТОЙ НА ПУСКОВУЮ УСТАНОВКУ | 2003 |
|
RU2243479C2 |
| Устройство для спуска секций крепи | 1984 |
|
SU1218120A1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| Электрический соединитель | 1982 |
|
SU1092626A1 |
| Устьевое противовыбросовое оборудование | 1990 |
|
SU1749443A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
- / ,,-г:,.я:.-Г
/ ,/x
If%
-И --1-7
f : -- I
