1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам, обеспечивающим перенос сельскохозяйственного орудия на трактор.
Известны устройства для переноса орудия на трактор, содержащие две нижние лродольные тяги механизма навески трактора, щарнирно соединенные в поперечной плоскости трактора И-образной рамой с шарнирным элементом связи верхних последовательно соединенных между собой тяг, одна из которых выполнена в виде дистанционно управляемого гидравлического цилиндра.
Такое устройство неудобно тем, что при повороте агрегата в процессе работы оно не обеспечивает перенос рабочего орудия на трактор, так как элемент связи верхней продольной тяги и дистанционно управляемого гидравлического цилиндра, выполняющих основную роль в переносе веса орудия, не может свободно перемещаться относительно поперечно расположенной части И-образной рамы.
Для обеспечения возможности переноса орудия на трактор как при прямолинейном движении агрегата, так и при его поворотах предложено шарнирный элемент связи верхних тяг выполнить подвижным относительно И-образной рамы. Этот элемент связи может быть
i2
соединен с И-образной рамой двумя охватывающими ее пластинами, в свободных концах которых закреплены вращающиеся ролики.
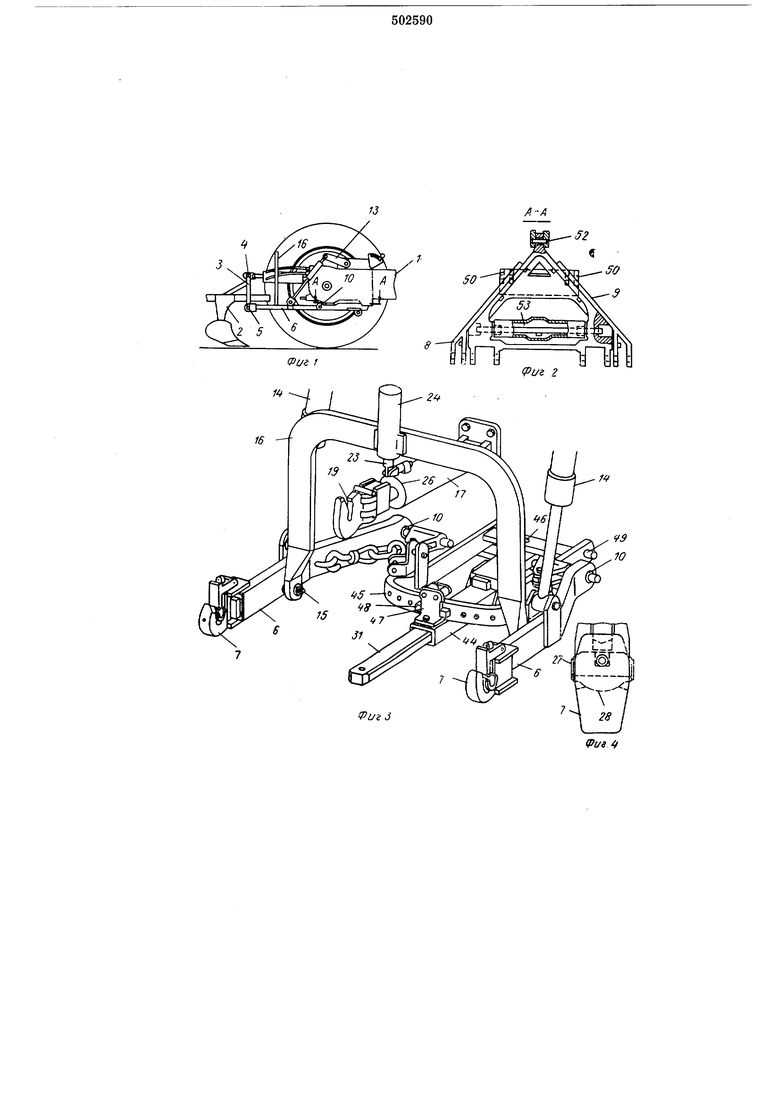
Иа фиг. 1 изображен механизм навески трактора с присоединенным к нему почвообрабатывающим орудием; на фиг. 2 - сечение по А-А на фиг. 1; на фиг. 3 - трехточечный механизм навески с И-образной рамой и с тяговым брусом, в аксонометрии; на фиг. 4 -
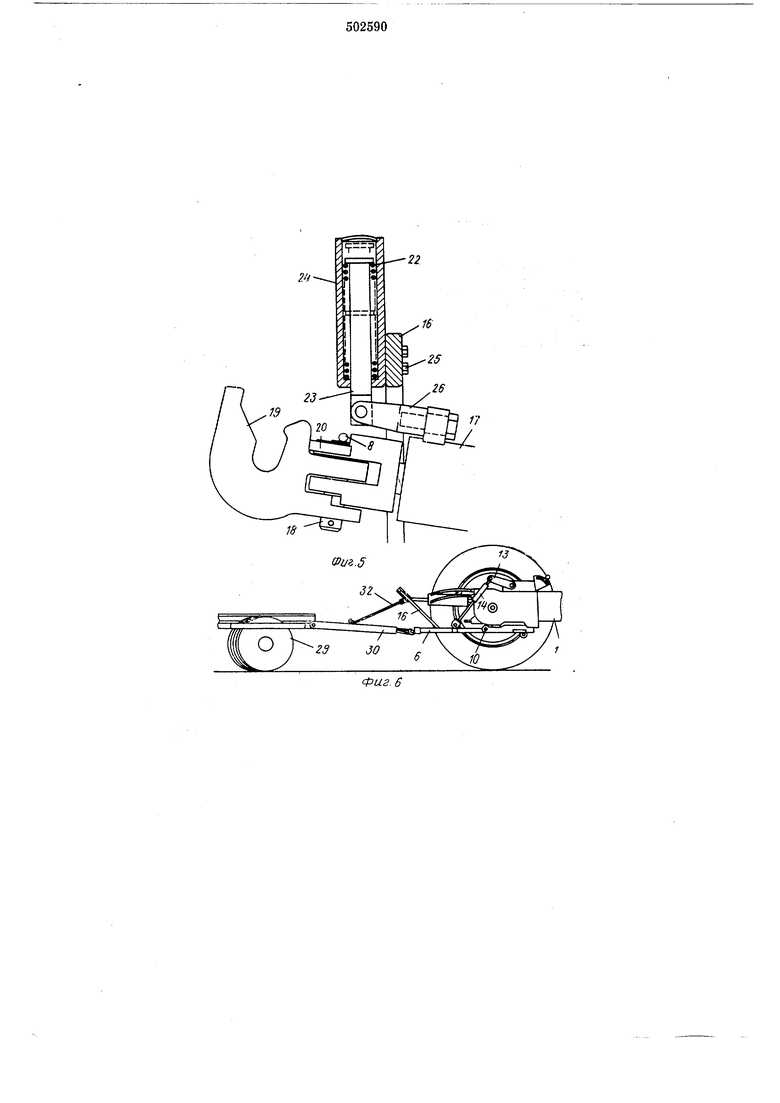
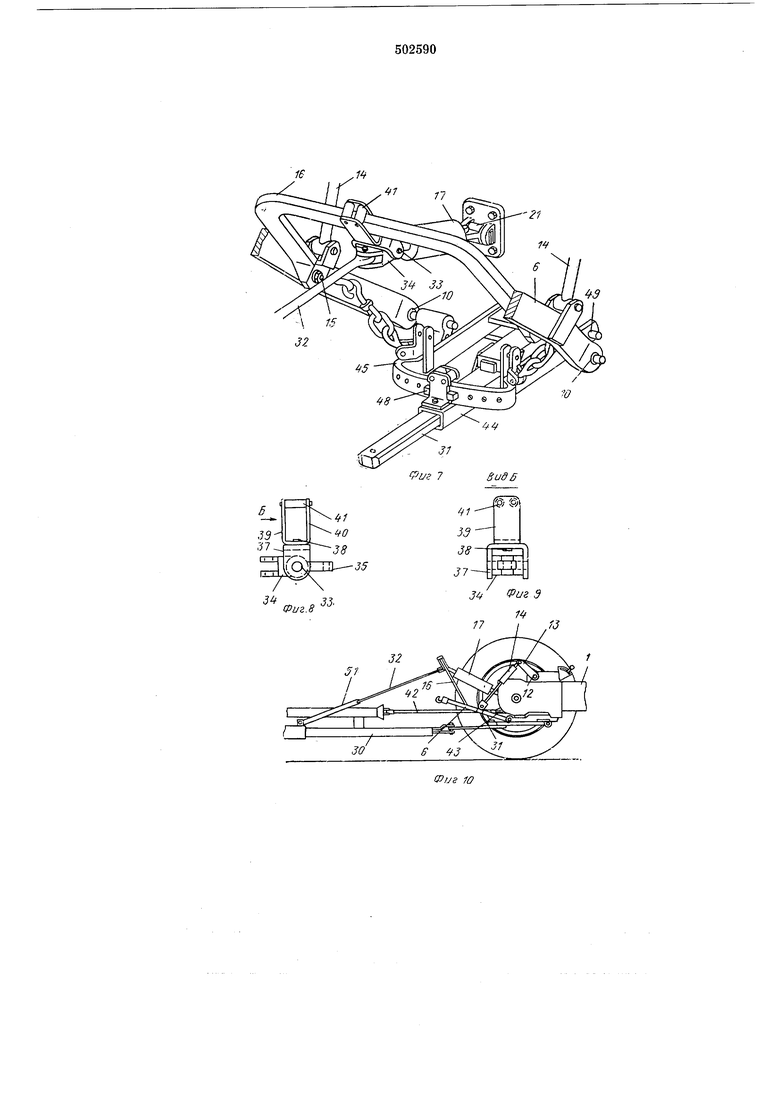
задняя часть нижних продольных тяг механизма навески трактора; на фиг. 5 - верхняя продольная тяга механизма навески; на фиг. 6- трактор и агрегатируемое почвообрабатывающее орудие, связанные устройством для переноса орудия на трактор при повороте агрегата; на фиг. 7 - трехточечный механизм навески с И-образной рамой при переносе орудия на трактор, в аксонометрии; на фиг. 8 - схема связи И-образной рамы, верхней продольной
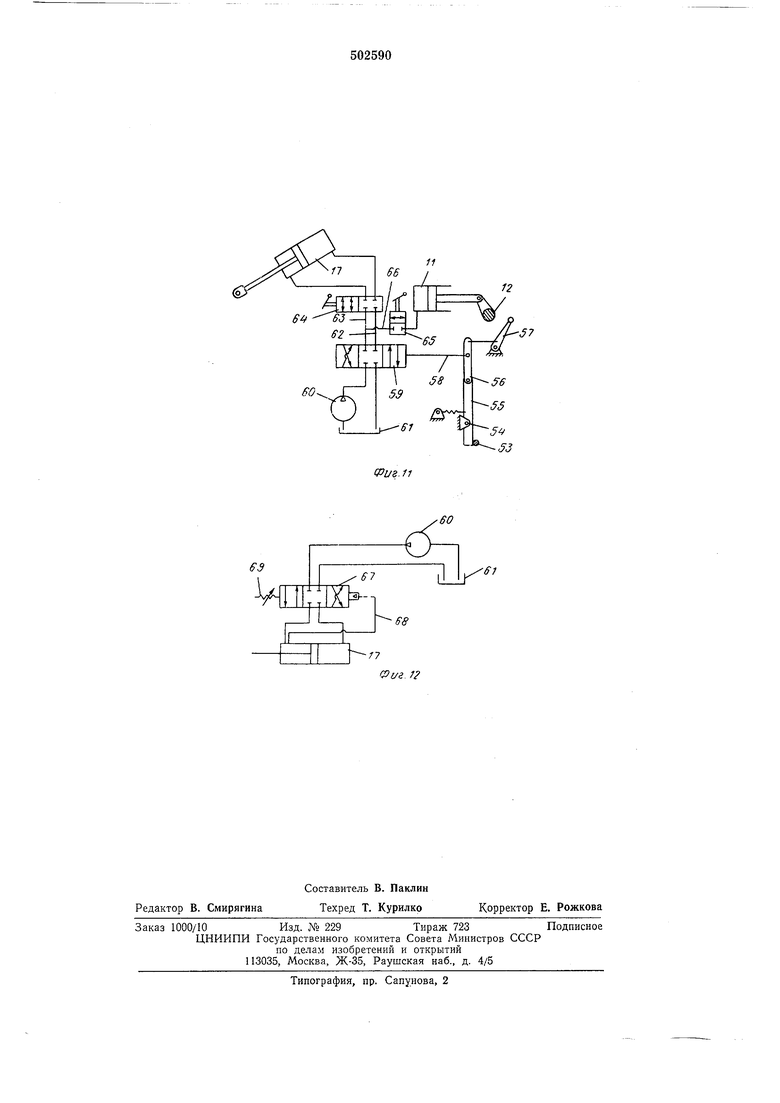
тяги и дистанционного управляемого гидравлического цилиндра; на фиг. 9 - вид по стрелке Б на фиг. 8; на фиг. 10 - механизм навески трактора с агрегатируемым орудием, привод которого осуществляется через карданную передачу от вала отбора мощности трактора; на фиг. 11-схема гидравлической системы устройства для переноса орудия на трактор; на фиг. 12 - вариант выполнения
гидравлической системы управления работой гидродилиндра верхней центральной тяги механизма навески трактора.
Устройство для переноса сельскохозяйственного орудия на трактор 1 содержит закрепленный на корпусе трактора 1 механизм трехточечной навески, при помощи которого присоединяется рабочее орудие, например плуг 2. На переднем конце рамы плуга закреплена стойка 3, которая имеет три шарнирных соединения с трехточечным механизмом навески трактора: одно верхнее 4 и два нижних 5.
Две нижние продольные тяги 6 имеют на концах крюки 7 для присоединения рабочих орудий. Передние концы нижних продольных тяг шарнирно соединены с проушинами 8 (фиг. 2) А-образной рамы 9, которая закреплена в нижней части корпуса трактора 1. С помошью шарниров 10 поворачиваются нижние тяги 6 в вертикально-продольной плоскости трактора. Закрепленный на корпусе трактора гидроцилиндр 11 кинематически связан через последовательно соединенные поворотный вал 12, подъемный рычаг 13 и раскосы 14 с нижними продольными тягами 6. С помощью цилиндрических шарниров 15 (фиг. 3 и 7) нижние тяги шарнирно соединены между собой П-образной рамой 16.
Позиционно управляемый гидравлический цилиндр 17 двустороннего действия выполняет роль центральной продольной тя-ги механизма навески трактора. На штоке гидроцилиндра 17 с ПОМОЩЬЮ вертикальной оси 18 установлен крюк 19, служащий для соединения с верхней точкой крепления стойки 3 рабочего орудия. Установленная между крюком 19 и штоком гидроцилиндра 17 пружинная рессора
20обеспечивает самоустанавливание крюка в продольной плоскости трактора. Корпус гидроцилиндра 17 с помощью горизонтальной оси
21закреплен на корпусе трактора. Гидроцилиндр 17 (фиг. 5) расположен ниже
верхней части П-Образной рамы 16 и связан с ней пружиной 22 и штоком 23, установленных во втулке 24, закрепленной на П-образной раме болтами 25.
Нижний конец штока 23 шарнирно соединен с вилкой 26, закрепленной на гидроцилиндре 17 и поворачивающейся относительно оси, параллельной оси симметрии гидроцилиндра 17. Благодаря подпружиненной связи гидроцилиндра с П-образной рамой можно легко подсоединить крюк 19 к раме сельскохозяйственного орудия.
Размеры и взаимное расположение нижних продольных тя,г 6 и гидроцилиндра 17 таковы, при которых обеспечивается -поджим крюка 19 к цапфе верхнего соединения 4 стойки 3.
Кинематическая связь гидроцилиндра 17 с П-образной рамой может быть осуществлена с помощью различных пружин: спиральной, плоской и т. п., а расположение зева крюка 19 может быть направлено вниз при верхнем размещении гидроцилиндра 17 над П-образной рамой.
В целях облегчения присоединения рабочих орудий в крюках нижних продольных тяг (фиг. 4) установлены вставки 27 наружная поверхность которых выполнена в виде сферы 28.
К раме орудия, например дисковой бороны 29, шарнирно прикреплено дышло 30, в которое, в свою очередь, соединяется с поперечиной прицепа, цапфы которой входят в зевы крюков 7 нижних продольных тяг. Дышло 30 может быть соединено непосредственно и с тяговым брусом 31, если работа агрегата должна основываться на поддержании постоянной величины силы сопротивления почвообрабатывающего орудия.
К средней части дышла 30 присоединена верхняя продольная тяга 32, которая при необходимости может быть присоединена и к раме дисковой бороны 29. Другой конец продольной тяги соединен щарнирным элементом связи с гидроцилиндром 17, выполненным в виде верхней продольной тяги. Шарнирный элемент связи выполнен в виде установленных на общей горизонтально расположенной оси 33 поворотных элементов 34 и 35. Поворотный элемент 34 посредством вертикальной оси 36 соединен с тятой 32, а поворотный элемент 35 шарн.ирно - со щтоком гидроцилиндра 17. Кроме того, на оси 33 щарнирно установлена вилка 37, на которой с помощью болта 38 закреплена вилкообразная деталь с пластинами 39 и 40, на концах которых установлены вращающиеся ролики 41.
Посредством охватывающих П-образную раму пластин 39, 40 и контактирующих с ней роликов 41 элемент связи продольной тяги 32 соединен с гидроцилиндром 17, т. е. элементы 34 и 35 могут перемещаться относительно верхней размещенной в поперечной плоскости трактора части П-образной рамы 16.
Устройство можно переоборудовать как в трехточечный механизм навески трактора (фиг. 3), так и в механизм навески, обеспечивающий перенос рабочего орудия на трактор, при поворотах агрегата (фиг. 7). Для этого отсоединяют конец штока 23 от вилки 26 гид роцилиндра 17, удаляют болты 25 и втулку 24, а на ее место устанавливают вилкообразную деталь так, что она охватывает пластинами 39, 40 и вращающимися роликами 41 по перечную часть П-образной рамы 16. Затем соединяют между собой верхнюю продольнук тягу 32 и гидроцилиндр 17 щарнирным элементом связи, включающим поворотные эле менты 34 и 35, а их ось 33 - вилкой 37 и бол том 38 с вилкообразной деталью, охватываю щей пластинами 39, 40 и роликами 41 П-образную раму.
Привод рабочих органов можно осуществлять от вала отбора мощности трактора через карданную передачу. Орудие включает карданную передачу 42, привод которой осуществляется от вала отбора мощности 43 трактора.В процессе работы П-образная рама 16 посредством нижних продольных тяг 6 приподнята, а орудие с трактором соединяется посредством вертикальной оси, соединяющей дышло орудия с тяговым брусом 31, который размещен во втулке 44, соединенной с рамой 45 вертикально расположенной осью 46. Втулка 44 связана с рамой 45 и может перемещаться относительно дугообразной ее части с помощью Пластин 47 с установленными в них вращающимися роликами. Ограничение поворота в горизонтальной плоскости тягового бруса 31 относительно рамы 45 обеспечивается упорами 48.
Рама 45 цапфами 49 соединяется с проущннами 50 А-образной рамы 9. Дыщло орудия 30 посредством продольных тяг 51 и 32 соединено с поворотным элементом 34.
Устройство в процессе работы агрегата на поворотах 1перемещает тяговый брус относительно дугообразной части рамы 45 в горизонтальной плоскости и в поперечной плоскости гидроцилиндр 17 и тяги 32 относительно П-образной рамы 16. Соответствующее же изменение длины гидроцилиндра 17 обеспечивает таким образом перенос сельскохозяйственного орудия на трактор как при прямолинейном движении агрегата, так и при его поворотах. Количественное изменение передачи весовой нагрузки орудия на трактор путем изменения положения в пространстве нижних продольных тяг 6 и изменения длины гидроцилиндра 17 может осуществляться либо ручным, либо автоматическим способами управления.
Автоматическое управление передачей орудия на трактор может осуществляться в зависимости от сил сопротивления орудия, действующих на механизм трактора.
Механизм автоматического управления переноса орудия на трактор включает А-образную раму 9, передний конец которой связан с корпусом трактора посредством оси 52, причем отверстие в А-образной раме под ось 52 выполнено в виде паза, что обеспечивает в определенных пределах возможность перемещения в продольной плоскости А-образной рамы относительно оси 52.
Дополнительно А-образная рама соединена с корпусом трактора через горизонтальный импульсный брус 53 (фиг. 11), в контакте с которым находится закрепленный в корпусе трактора на оси 54 подпружиненный рычаг 55. Вехний конец рычага 55 шарнирно соединен с рычагом 56, который связан с рукояткой 57 ручного управления. Средняя часть рачата 56 тягой 58 связана с гидравлическим распределительным клапаном 59, рабочие полости которого с одной стороны Сообщены с гидронасосом 60 и резервуаром 61, а с другой стороны - трубопроводами 62 и 63 с управляемым вручную отключающим клапаном 64.
Гидравлический распределительный клапан представляет собой трехходовой распределитель.
При среднем положении гидравлического распределительного клапана трубопроводы 62 и 63 разобщены с гидронасосом fin ц резервуаром 61. При правом положении распределительного клапана 59 трубопровод 62 сообщается с гидронасосом 60, а трубопровод 63 - с резервуаром 61. При левом положении распределительного клапана трубопровод 62 сообщается резервуаром 61, а трубопровод 63 - с гидронасосом 60.
В зависимости от необходимости отключающий клаПан 64 можно устанавливать в два положения, обеспечивающих доступ рабочей жидкости в рабочую полость гидроцилиндра 17 или ее перекрытие. Рабочая полость гидроцилиндра 11 через управляемый вручную клапан 65 и трубопровод 66 сообщены с трубопроводом 63. Клапан 65 можно ставить в положение «Открыт или «Закрыт для подачи рабочей жидкости в полость гидроцилиндра 11 или ее перекрытия. Устройство работает следующим образом.
При необходимости соединения рабочего орудия с трактором по трехточечной системе навески трактор подают назад до непосредственной близости с орудием (фиг. 1). Если рабочие поверхности крюков 7 нижних
продольных тяг и крюка 19 не совпадают с соединениями 4 и 5, то клапан 64 устанавливают в положение, обеспечивающее подачу рабочей жидкости в гидроцилиндр 17, распределительный клапан 59 в правое положение
для сообщения рабочей полости гидроцилиндра 11 с резервуаром 61, крюки 19 и 7 опускаются. При совпадении крюков 7 и 19 с соединениями трактор подают назад до тех пор, пока цапфы стойки не войдут в захваты крюков.
Для облегчения совпадения соединений 4 на стойке орудия с захватом крюка 19 изменяют длину гидроцилиндра 17, для чего устанавливают распределительный клапан 59 в левое или правое положения.
Для исключения выхода из поверхностей крюков 7 и 19 соединительных элементов (цапф) стойки орудия крюки снабжены блокировочными механизмами. При автоматическом управления передачей орудия на трактор с учетом сил сопротивления орудия клапан 64 не сообщает рабочую полость гидроцилиндра 17 с напорной ПОЛОСТЬЮ клапана 59, а клапан 65 сообщает рабочую полость гидроцилиндра 11 с напорной полостью клапан 59.
Сопротивление орудия при обработке почвы воздействует на нижние продольные тяги, изгибая при этом импульсный брус 53, который перемещает рычаг 55 и соответственно сдвигает влево гидравлический распределительный клапан, тем самым сообщая гидронасос с рабочей полостью гидроцилиндра 11. Под действием давления рабочей жидкости гидроцилиндр поднимает нижние продольные тяги и
передает орудие на трактор.
При уменьщении силы сопротивления орудия до заданной величины импульсный брус 53, действуя на рычаг 55, возвращает клапан 59 в нейтральное положение. Аналогичным
способом, но в обратной последовательности
приводится в действие гидроцилиндр 11 для заглубления орудия в почву, если силы сопротивления орудия будут меньше наперед.заданной величины.
Принцип работы устройства в сочетании с орудиями, представленными на фиг. 6 и 10, заключается в следующем. Отключающий клапан 64 устанавливают в положение, обеспечивающее оодачу рабочей жидкости в гидроцилиндр 17, а клапан 65 в положение, исключающее подачу рабочей жидкости в гидроцилиндр 11.
Автоматическое управление устройством для передачи орудия на трактор осуществляется таким же образом, как описано выше.
Силы сопротивления орудия передаются через нижние продольные тяги или через тяговый брус 31, вследствие чего импульсный брус 53 изгибается, воздеЙ1ствуя тем самым на перемепгение распределительного клапана 59, который, в свою очередь, управля-ет гидроцилиндром 17, увеличивая или уменьшая передачу весовой нагрузки орудия на трактор.
Наличие в предложенном устройстве элемента связи гидроцилиндра 17 с тягой 32, соединенного с помощью пластин 39, 40 и роликов 41 с П-образной рамой 16, обеспечивает постоянное передаточное отношение между гидроцилиндром 17, тягой 32 и дышлом 30 орудия в момент работы агрегата на поворотах, поскольку тяга 32 и гидроцилиндр 17 будут перемещаться относительно П-образной рамы по кривой линии.
На фит. 12 представлен второй вариант выполнения гидравлической системы управления гидроцилиндром 17 в зависимости от силы сопротивления орудия. Такая гидравлическая система управления работой гидроцилиндра 11 применима для механизмов навески тракторов, не имеющих регулирующей системы в зависимости от величины силы сопротивления орудия, воспринимаемой нижними продольными тягами или тяговым брусом 31.
Гидравлическая система включает трехходовой гидравлический распределитель 67, рабочие полости которого с одной стороны сообщены с гидронасосом 60 и резервуаром 61, а с другой - с рабочими полостями гидроцилиндра 17. Магистраль 68 сообщает щтоковую полость гидроцилиндра 17 с правой торцовой стороной золотника (на чертежах не показан) распределителя 67.
На левую торцовую сторону золотника распределителя 67 воздействует пружина 69, усилие сжатия которой при нейтральном положени золотника распределителя уравновешивается заданной силой давления рабочей жидкости со стороны штоковой полости гидроцилиндра 17 на правую торцовую сторону золотника раснределителя 67. Если в процессе работы агрегата сила сопротивления орудия превыщает заранее установленную величину, то давление в штоковой полости гидроцилиндра
17 возрастает, в результате чего золотник распределителя смещается влево, сообщая внещтоковую полость гидроцилиндра с гидронасосом 60 и тем самым выдвигая шток из гидроцилиндра 17.
Если давление в штоковой полости гидроцилицдра 17 ниже установленной величины, то золотник распределителя 67 под действием пружины 69 сдвигается вправо, сообщая тем самым штоковую полость гидроцилиндра с
гидронасосом 60 и обеспечивая втягивание щтока в гидроцилиндр и установку золотника распределителя в нейтральное положение. Таким образом обеспечивается передача постоянной величины весовой нагрузки рабочего
орудия на трактор.
Приведенная на фиг. 12 гидравлическая система управления работой гидроцилиндра 17 исключает необходимость наличия в механизме навески трактора А-образной рамы, импульсного бруса и систему тяг, изображенных на фиг. 11.
Предмет изобретения
1. Устройство для переноса сельскохозяйственного орудия на трактор, содержащее две нижние продольные тяги механизма навески трактора, шарнирно соединенные в поперечной плоскости трактора П-образной рамой с
шарнирным элементом связи верхних, последовательно соединенных между собой тяг, одна из которых выполнена в виде дистанционно управляемого гидравлического цилиндра, отличающееся тем, что, с целью обеспечения возможности переноса орудия на трактор при поворотах агрегата в процессе работы, шарнириый элемент связи верхних тяг выполнен относительно П-образной рамы. 2. Устройство по п. 1, отличающееся
тем, что шарнирный элемент связи верхних тяг соединен с П-образной рамой двумя охватывающими ее пластинами, в свободных концах которых закреплены вращающиеся ролики.
52
IPL/Z д
17
-to -38
v
.a..
9
Ю
SuffS
Э©
y/ 5J(fJ7
/
J4, «SiyS
11
12
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСЕВНОЙ КОМБАЙН | 2010 |
|
RU2430498C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ НАВЕСНОГО ОБОРУДОВАНИЯ К ТРАНСПОРТНОМУ СРЕДСТВУ | 2004 |
|
RU2282959C2 |
| Устройство для соединения самоходных шасси с рабочими орудиями | 1972 |
|
SU516362A1 |
| ДОГРУЗОЧНО-ПРИВОДНОЕ УСТРОЙСТВО | 1998 |
|
RU2147525C1 |
| Навесное устройство малогабаритного трактора | 1991 |
|
SU1793832A3 |
| Устройство бокового смещения рамы пропашного культиватора | 2023 |
|
RU2804100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| МЕХАНИЗМ НАВЕСКИ ТРАКТОРА | 2013 |
|
RU2547769C1 |
| Сельскохозяйственный агрегат | 1983 |
|
SU1165250A1 |
| Дополнительная опорная ось | 2015 |
|
RU2618613C1 |
Фиг. //
