Изобретение относится к грузоподъемной технике, в частности к сельскохозяйственному машиностроению.
Известно устройство для поворота и изменения вылета стрелы крана, содержащее основание, раму, шарнирно установленные на ней под углом друг к другу гидроцилиндры, штоки которых шарнирно соединены между собой и со стрелой, установленной на раме на поворотной в горизонтальной плоскости оси с возможностью поворота в вертикальной плоскости, в котором с целью расширения зоны действия и снижения динамических нагрузок рама выполнена в виде Т-образной фермы, на концах горизонтальной перекладины которой закреплены корпусы гидроцилиндров, а вертикальная стойка фермы выполнена пустотелой для закрепления внутри нее поворотной оси, при этом ферма установлена на основании с возможностью поворота в горизонтальной плоскости посредством дополнительного привода, взаимодействующего с наружной поверхностью вертикальной стойки; дополнительный привод выполнен в виде гидровинтового механизма, включающего закрепленную на наружной поверхности вертикальной стойки Т-образной фермы обойму и размещенный внутри нее поршень с центральным отверстием, охватывающим вертикальную стойку, установленный с возможностью перемещения вдоль оси последней, зафиксированный от поворота вокруг нее и взаимодействующий с ней посредством винтовой нарезки, выполненной на сопрягаемых поверхностях поршня и стойки (SU, авторское свидетельство, N 1813697, МПК5 B 66 C 23/82. Устройство для поворота и изменения вылета стрелы крана //В.М. Герасун, А.А. Карсаков, В. И. Пындак, А. Ф. Рогачев, В.Л. Строков. Заявлено 11.03.1991, опубликовано 07.05.1993).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства относятся ограниченная зона обслуживания в горизонтальной плоскости и сложность конструкции дополнительного привода.
Наиболее близким устройством того же назначения к заявляемому объекту по совокупности признаков является манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью и дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки (см. Навесной манипулятор "Волгоградский" // Инф. листок Волгоградского ЦНТИ N 230-97. Составители: В.М. Герасун, В.И. Пындак, А.Ф. Рогачев. - Волгоград. - 1997. - 4 с.).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, принятого за ближайший аналог, относятся ограниченная зона обслуживания в горизонтальной плоскости шарнирно-сочлененной стрелы и рукояти и неудовлетворительные динамические и кинематические характеристики механизма поворота.
Сущность изобретения заключается в следующем.
Задача, на решение которой направлено заявляемое изобретение, - расширение зоны обслуживания в горизонтальной плоскости.
Технический результат - повышение диапазона углов поворота стрелы и рукояти в горизонтальной плоскости, упрощение конструкции и снижение динамических нагрузок на крайних участках поворота колонки.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном манипуляторе, содержащем плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки, упомянутая колонка выполнена в виде L-образной балки, горизонтальный брус которой ориентирован в сторону проушин попарно установленных силовых гидроцилиндров стрелы, а нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов навески, при этом удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки, а его дополнительные гидроцилиндры, штоковые и бесштоковые полости которых перекрестно сообщены гидравлически между собой, установлены разнонаправленно и соединены с ним штоками, причем основание одного из них размещено на горизонтальном брусе L-образной балки, а основание другого - на дополнительной балке плоского основания.
За счет того что механизм поворота колонки выполнен в виде пары разнонаправленных силовых цилиндров и двуплечего рычага, ось поворота которого совмещена с осью поворота колонки, достигается указанный выше технический результат.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию "изобретательского уровня" заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от ближайшего аналога признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение технического результата.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень" по действующему законодательству.
Изобретение поясняется чертежами.
На фиг. 1 изображен манипулятор в рабочем положении, вид сбоку.
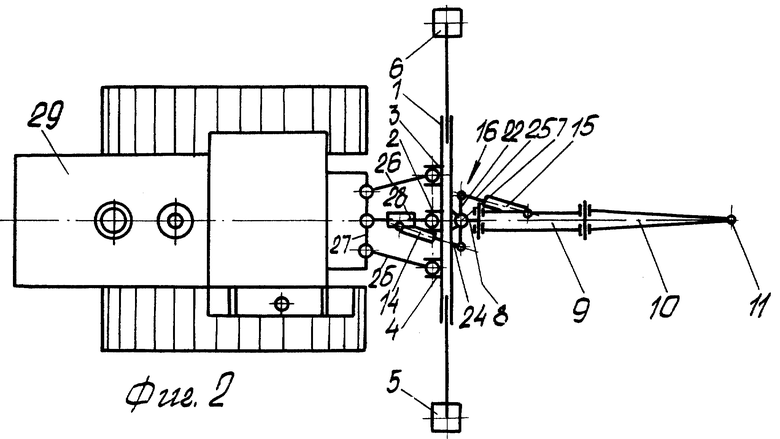
На фиг. 2 - то же, вид в плане.
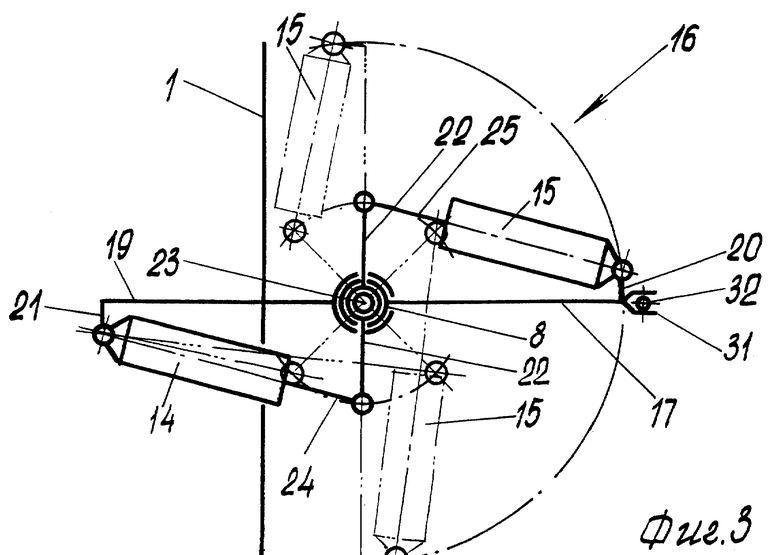
На фиг. 3 - сечение А-А на фиг. 1, механизм поворота опорно-поворотной колонки при крайних левом, среднем и правом положениях стрелы.
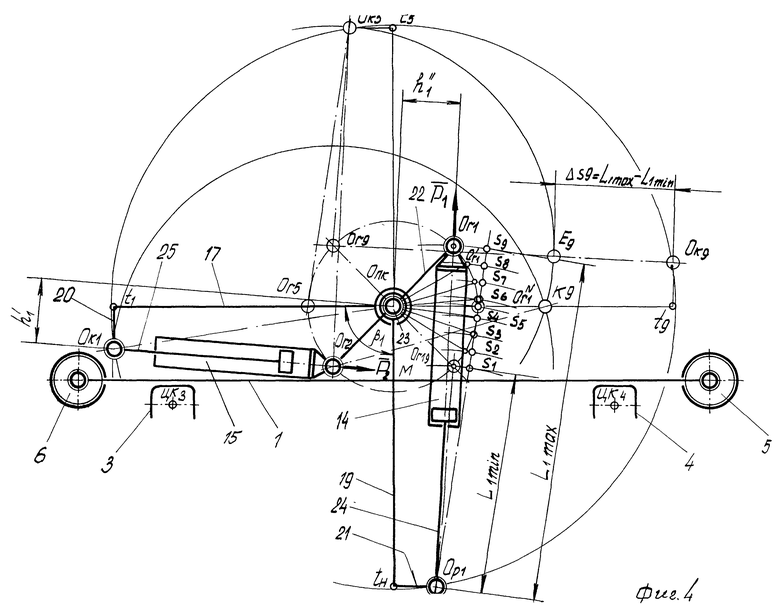
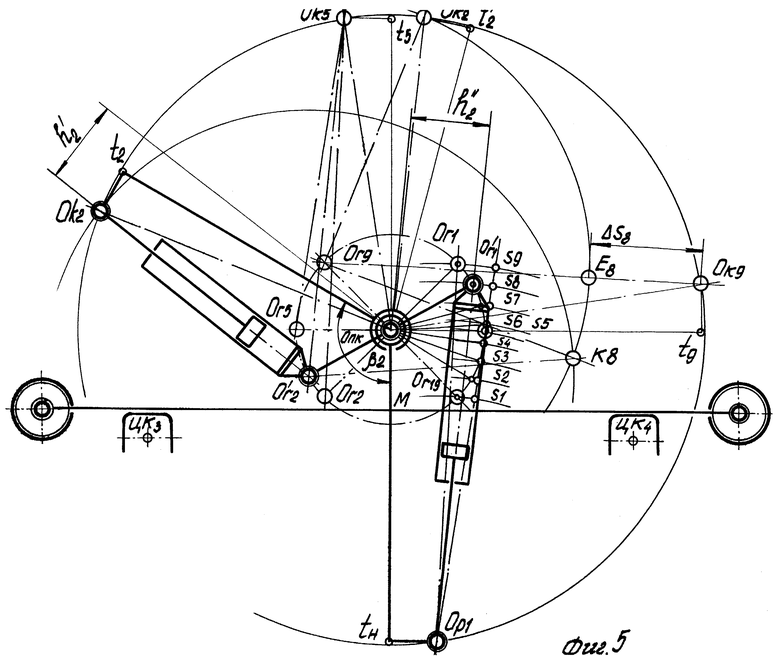
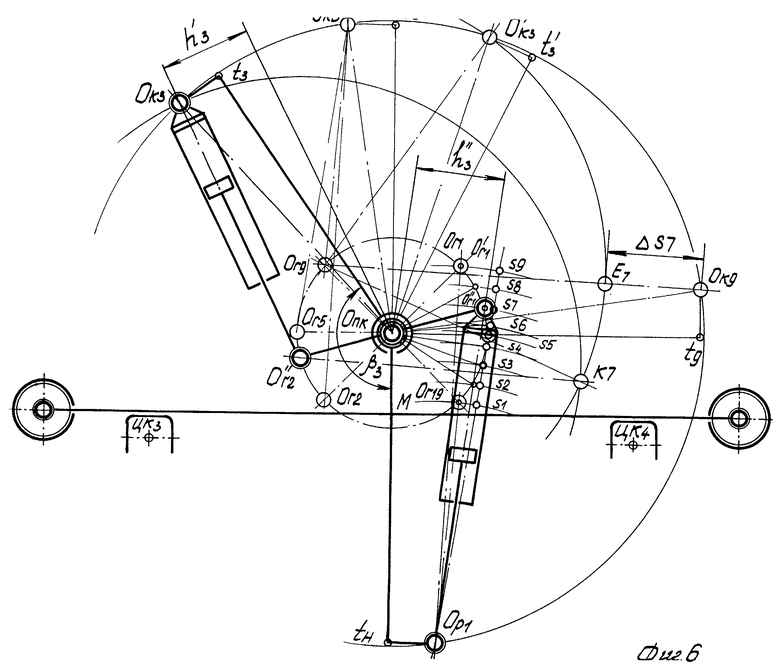
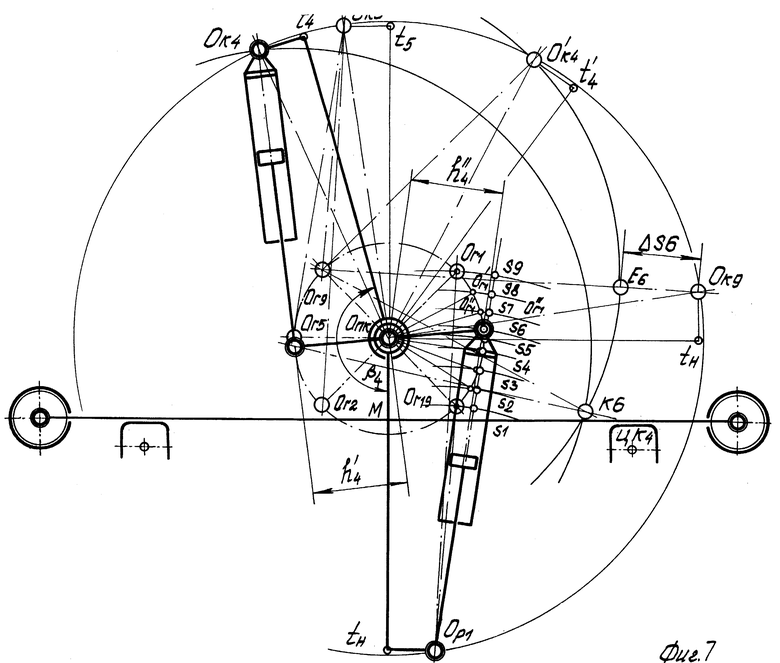
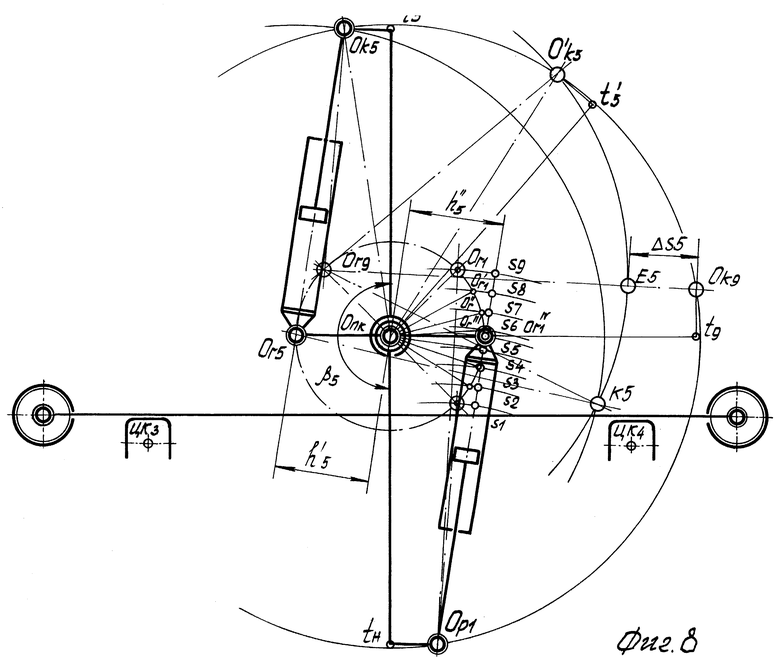
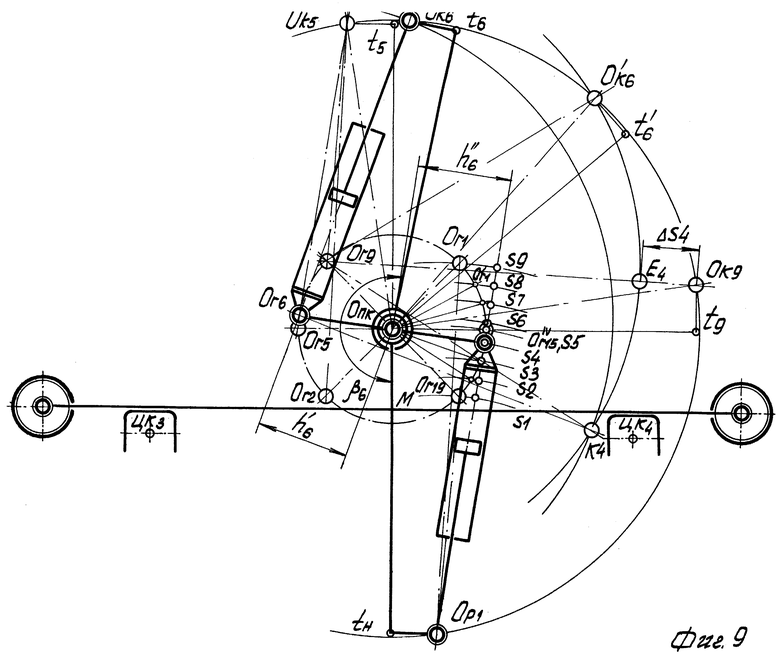
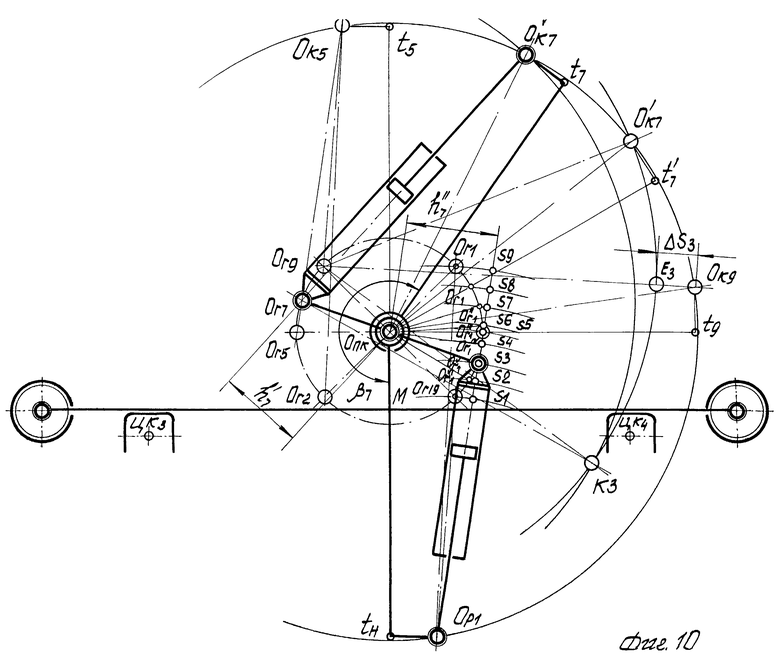
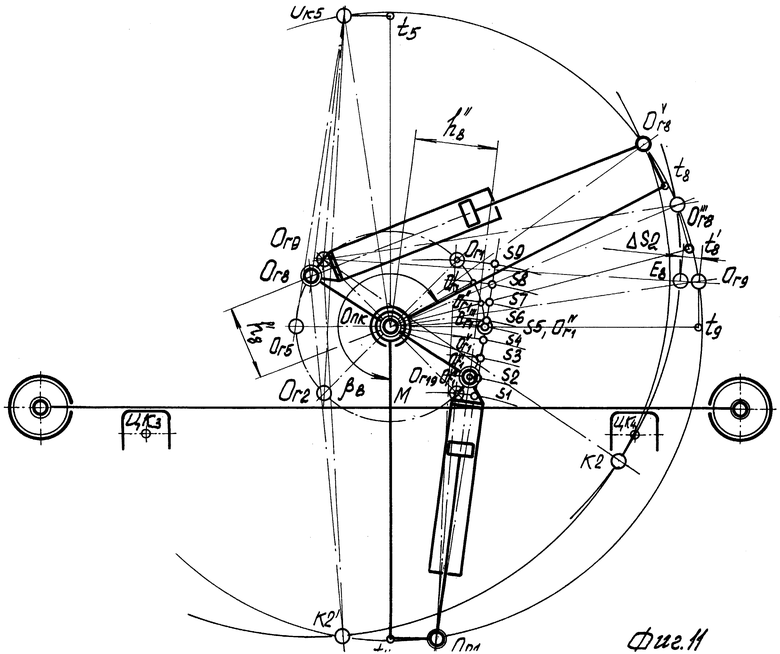
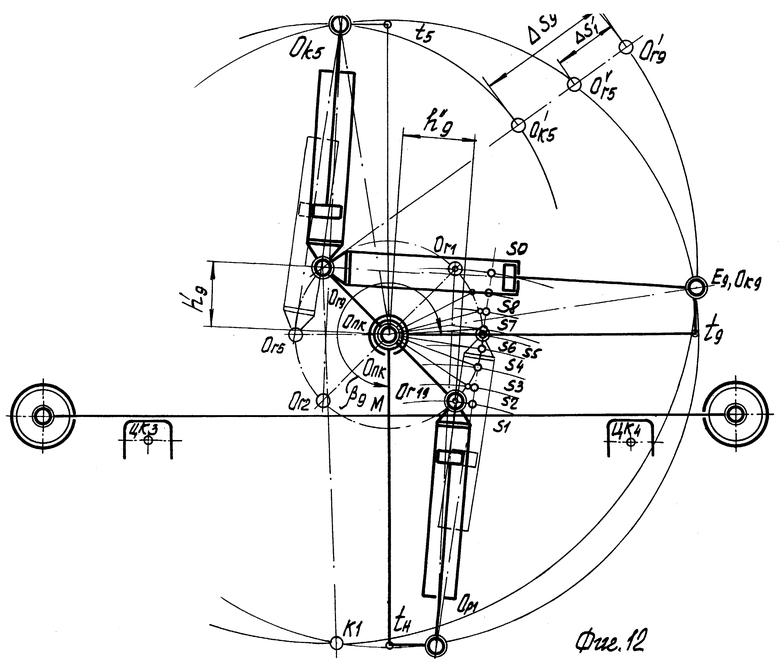
На фиг. 4 - 12 приведены кинематика и графоаналитическое исследование механизма поворота опорно-поворотной колонки.
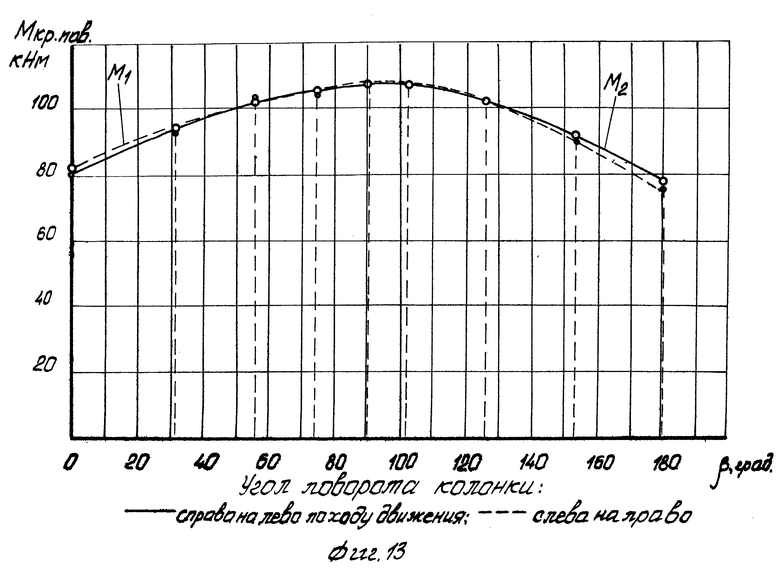
На фиг. 13 показаны изменения вращающих моментов на опорной колонке от углов ее поворота.
Сведения, подтверждающие возможность осуществления изобретения, заключаются в следующем.
Манипулятор содержит плоское основание 1 с кронштейнами навески 2, 3 и 4 и выдвижными опорами 5 и 6, закрепленную с возможностью поворота вокруг вертикальной оси 7 основания 1 опорно-поворотную колонку 8 со смонтированными шарнирно на ней стрелой 9, рукоятью 10 и грузозахватным крюком 11, попарно установленные силовые гидроцилиндры 12 стрелы 9, гидроцилиндры 13 управления стрелой и рукояти 10 и дополнительные гидроцилиндры 14 и 15 механизма 16 поворота опорно-поворотной колонки 8.
Опорно-поворотная колонка 8 выполнена в виде L-образной балки, горизонтальный брус 17 которой ориентирован в сторону проушин 18 попарно установленных силовых гидроцилиндров 12. Нижний срез плоского основания 1 снабжен ортогонально установленной дополнительной балкой 19, удаленный конец которой направлен в сторону кронштейнов 3 и 4. Удаленные концы 20 и 21 горизонтального бруса 17 и дополнительной балки 19 кинематически связаны механизмом 16 поворота опорно-поворотной колонки 8.
Механизм 16 поворота колонки 8 снабжен двуплечим рычагом 22, ось 23 которого совмещена с вертикальной осью 7 поворота колонки 8. В дополнительных гидроцилиндрах 14 и 15 штоковые и бесштоковые полости перекрестно гидравлически сообщены между собой. Основание гидроцилиндра 14 соединено шарнирно с удаленным концом 21 дополнительной балки 19. Основание гидроцилиндра 15 размещено на дальнем конце горизонтального бруса 17 L-образной балки колонки 8. Штоки 24 и 25 разнонаправленных дополнительных гидроцилиндров 14 и 15 соединены осями с удаленными концами двуплечего рычага 22.
Манипулятор работает следующим образом.
При агрегатировании манипулятора с трактором класса тяги 3,0, последний задним ходом подают к плоскому основанию 1 со стороны кронштейнов навески 2-4. Нижние продольные тяги 26 на оси 27 размещают на максимальную ширину таким образом, чтобы центральная регулируемая верхняя тяга 28 и нижние продольные тяги 26 трактора 29 образовали "трехточечную" схему навески плоского основания 1. Удаленные концы тяг 26 и 28 пальцами соединяют с кронштейнами навески 2-4. Рукавами высокого давления соединяют надлежащим образом попарно установленные силовые гидроцилиндры 12 и 13 и дополнительные гидроцилиндры 14 и 15 с раздельно-агрегатной гидравлической системой трактора 29. Далее тягами 26 и 28 гидронавески трактора 29, управляемой силовым цилиндром 30, плоское основание 1 переводят в полное транспортное положение. Опоры 5 и 6 выдвигают из полости плоского основания 1 и фиксируют пальцами. Далее основание 1 опускают на опоры 5 и 6. Ручку управления гидрозолотника силового гидроцилиндра 30 переводят в положение "Нейтральное".
Поднимаемый груз зачаливают подстропником и соединяют с грузозахватным крюком 11. Управляя левой и правой ручками гидрозолотников гидрораспределителя трактора 29, гидроцилиндрами 12 и 13 стрелы 9 и рукояти 10 поднимают груз на заданную высоту над опорной поверхностью. Далее включают в работу механизм 16 поворота опорно-поворотной колонки 8. Перекрестное гидравлическое соединение штоковых и бесштоковых полостей дополнительных силовых гидроцилиндров 14 и 15 механизма 16 и параллельно со средней секцией гидрораспределителя трактора 29 позволяет одной ручкой гидрозолотника дистанционно управлять положением стрелы 9 и рукояти 10 относительно основания 1. При переводе средней ручки гидрораспределителя в положение "Подъем" рабочая жидкость под давлением устремляется в полости: бесштоковую цилиндра 14 и штоковую цилиндра 15. Выдвижение штока 24 силового цилиндра 14 и втягивание штока 25 создают крутящий момент, поворачивающий двуплечий рычаг 22 вокруг оси 23. Поворот двуплечего рычага 22 и втягивание штока 25 цилиндра 15 приводят к тому, что горизонтальный брус 17 поворачивается вместе с L-образной балкой колонки 8 вокруг вертикальной оси 7 плоского основания 1. На виде сзади манипулятора стрела 9 с рукоятью 10 и грузозахватным крюком 11 поворачиваются от левой выдвижной опоры 5 к правой выдвижной опоре 6. При достижении заданной координаты оператор переводит ручку гидрозолотника в положение "Нейтральное". Оперируя левой и правой ручками гвдрораспределителя трактора 29, тракторист укладывает перемещаемый груз или в поддон или на платформу транспортного средства.
На фиг. 4-12 представлено графоаналитическое исследование кинематики механизма 16 поворота опорно-поворотной колонки 8 и его динамики с учетом того, что усилия P1, развиваемые штоками 24 и 25 штоковых полостей дополнительных силовых гидроцилиндров 14 и 15, относятся к усилиям P2, развиваемым штоками 24 и 25 при подаче рабочей жидкости в штоковые полости упомянутых гидроцилиндров, относятся как 1 : 0,8. Моменты M1 и M2, вращающие опорно-поворотную колонку 8 со стрелой 9 и рукоятью 10 при повороте грузозахватного крюка 11 от правой выносной опоры 6 к левой выносной опоре 5 и обратно, показаны графиками на фиг. 13. Делитель потоков рабочей жидкости на входах дополнительных силовых гидроцилиндров 14 и 15 настроен таким образом, чтобы обеспечивать равномерные скорости перемещения штоков 24 и 25 как при втягивании последних, так и при выдвижении. Представленные графики свидетельствуют о равномерной угловой скорости поворота колонки 8 при незначительном изменении величины крутящего момента M1 (M2).
При завершении погрузочно-разгрузочных работ тракторист рукоять 10 и стрелу 9 переводит в транспортное положение, приближая грузозахватный крюк 11 к основанию 1. Далее крюк 11 механизатор заводит в проушины 31 на удаленном конце 20 горизонтального бруса 17 поворотной колонки 8 и фиксирует его быстроразъемным пальцем 32. Далее, манипулируя средней ручкой золотника гидрораспределителя, механизмом 16 поворотную колонку 8 переводят в крайнее правое положение, устанавливая рукоять 10 и стрелу 9 параллельно плоскому основанию. В сложенном состоянии габариты манипулятора не выступают за абрис агрегагируемого трактора.
Описанный механизм поворота опорно-поворотной колонки обеспечивает высокую степень надежности, упрощает конструкцию манипулятора и расширяет зону его работы. В транспортном положении заявленный манипулятор имеет минимальные размеры.
Таким образом, изложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в сельскохозяйственном машиностроении;
для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте нижеприведенной формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов;
средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение усматриваемого заявителями технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость" по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1999 |
|
RU2150813C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| ГИДРОПРИВОД НАВЕСНОГО МАНИПУЛЯТОРА | 1999 |
|
RU2158707C1 |
Изобретение относится к грузоподъемной технике, преимущественно к сельскохозяйственному машиностроению. Манипулятор содержит плоское основание 1 с кронштейнами 2-4 навески и выдвижными опорами 5, 6, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку 8 со смонтированными шарнирно на ней стрелой 9, рукоятью 10 и грузозахватным крюком 11, попарно установленные силовые гидроцилиндры управления стрелой 9 и рукоятью 10, дополнительные гидроцилиндры 14, 15 механизма поворота опорно-поворотной колонки 8. Колонка 8 выполнена в виде L-образной балки, горизонтальный брус которой ориентирован в сторону проушин попарно установленных силовых цилиндров стрелы 9. Нижний срез плоского основания 1 снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов 3, 4 навески. Удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом 16 поворота колонки 8, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки 8. Дополнительные гидроцилиндры 14, 15, штоковые и бесштоковые полости которых перекрестно сообщены гидравлически между собой, установлены разнонаправленно и соединены с ним штоками. Основание одного гидроцилиндра 15 размещено на горизонтальном брусе L-образной балки, а основание другого 14 - на дополнительной балке плоского основания. Обеспечивается повышение диапазона углов поворота стрелы и рукоятки в горизонтальной плоскости, упрощается конструкция и снижаются динамические нагрузки на крайних участках поворота колонки. 13 ил.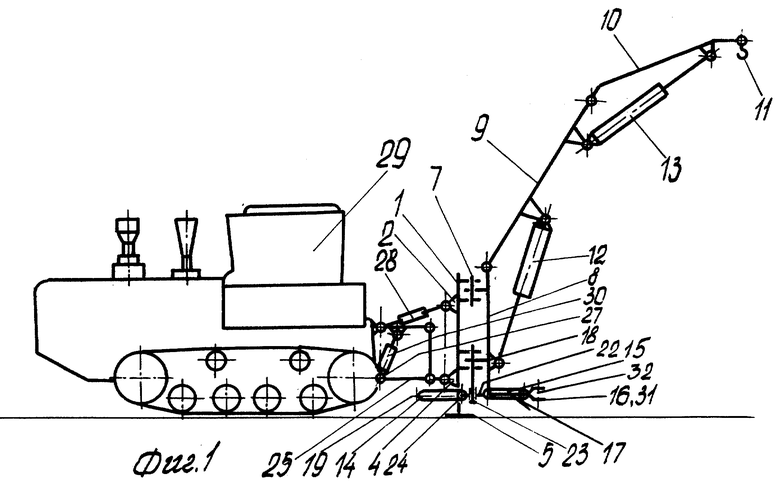
Манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки, отличающийся тем, что колонка выполнена в виде L-образной балки, горизонтальный брус которой ориентирован в сторону проушин попарно установленных силовых гидроцилиндров стрелы, а нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов навески, при этом удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки, а его дополнительные гидроцилиндры, штоковые и бесштоковые полости которых перекрестно сообщены гидравлически между собой, установлены разнонаправленно и соединены с ним штоками, причем основание одного из них размещено на горизонтальном брусе L-образной балки, а основание другого - на дополнительной балке плоского основания.
| Герасун В.М | |||
| и др | |||
| Информационный листок | |||
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1997 |
|
RU2118479C1 |
| SU 1126471 A, 30.11.1984 | |||
| Навесной копновоз-стоговоз | 1958 |
|
SU121986A1 |
| Самопогружающееся транспортное средство | 1983 |
|
SU1224195A1 |
| Фрумкис И.В | |||
| Гидравлическое оборудование тракторов, автомобилей и сельскохозяйственных машин | |||
| - М.: Колос, 1971, с | |||
| 395 - 396. | |||
