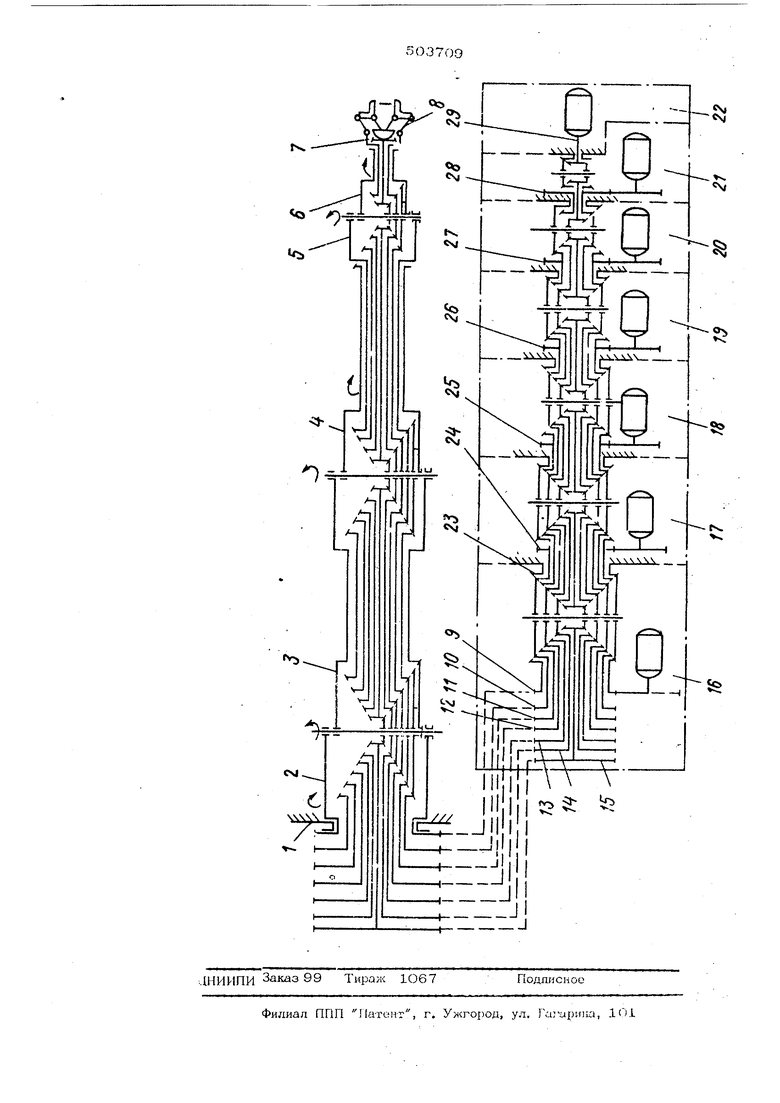
иоридок uii следовательно, и ко;шчество диф4 ;р« 11иалоБ) на единшу меньший, чем предыдущий. Старший модуль 16 для рассмагриваем,й схемы имеет шестой порядок а постедний модуль 22 - нулевой порядок. Выходами и входами служат полуоси дифференциалов моду.л и вал, кинематически свя занный с приводом. Например, в модуле 16 выходами являются полуоси 9-15. Кинемат г«5ская связь общего i эдила дифференциалов с приводом осуществляется в модулях 16-21 планетарными редуктораv. В каждом редукторе ьодилом общее водило дифференциалов модуля, солнечное колесо (например, колесо 23 в модуле 16) укреплено неподвижно на основании, а центральное колесо (например, 9 в модуле 16) связано кинематически с приводом и служит одним из выходов. Таким образом, число входов.каждого модуля его порядку и единицу меньше количе.ства выходов. Выходы каждого модуля связань со входам.: предыдущего, а выходы 9-15 старшего модуля 16 являются выходами силового блока, HyлeБJЙ (младший) модуль 22 входов не имеег, Манипуля-тор работает слел юшим образом. При вращении колес 24-28 и вала 29 привода нулевого модуля 22 крутяшие моменты передаются через механизм компенсации и кинегли;гические цепи звеньям 2-8 руки так, что перемещение звена 8 относи- тельно звена 7 aiiBucirr тодгжо от IIOIJOM..-щения вала 29, а от)1осиголы1оо iit)peMuiii.ние звеньев 7 и 6 - только or перемсчиення колеса 28, и так далее. Наконец, аоримешоние звена 2 относигельно основания 1 завигит только от перемещения колеса 9. Так исключается кннемат1гческ6е взаимное приводов при произвольном числе звеньев руки и при произвольной ориентации осей шарниров. При этом доспггается уменьшение усгановлесюй мощности приводов манипулятора, так как один привод не может в такой схеме служить Нагрузкой для фугого. Формула изобретен М1нипулятор, содержащий механическую руку, состоящую из шарнирно соединенных звеньев, кинематически связанных с силовым блоком, и механизм компенсации взаимного влияния звеньев, отличающийся тем, что, с целью повышени надежности и точности манип лирования, силовой блок выполнен в виде последовательно соединенных и снабженных индивидуальными приводами модулей, каждый из которых содержит дифференциалы с общим воДилом, кинематически связанным с приводом, а количество дифференциалов в последующем модуле на единицу меньше, чем в предыдущем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ШУМАТОВА (ВАРИАНТЫ) | 2014 |
|
RU2577966C1 |
| Механическая трансмиссия АТС (4х4) с межколесным регулируемым дифференциальным механизмом и системой автоматического управления режимами работы дифференциалов при непрямолинейном движении | 2020 |
|
RU2749974C1 |
| Манипулятор | 1982 |
|
SU1013260A1 |
| Механизм распределения мощности в трансмиссии транспортного средства | 2022 |
|
RU2789152C1 |
| Приводной механизм с переключением передачи | 2018 |
|
RU2675753C1 |
| Цилиндрический самоблокирующийся дифференциал | 1984 |
|
SU1194717A1 |
| МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2763002C1 |
| ДИФФЕРЕНЦИАЛ - "ИВАН" | 1998 |
|
RU2135859C1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |