СО
to
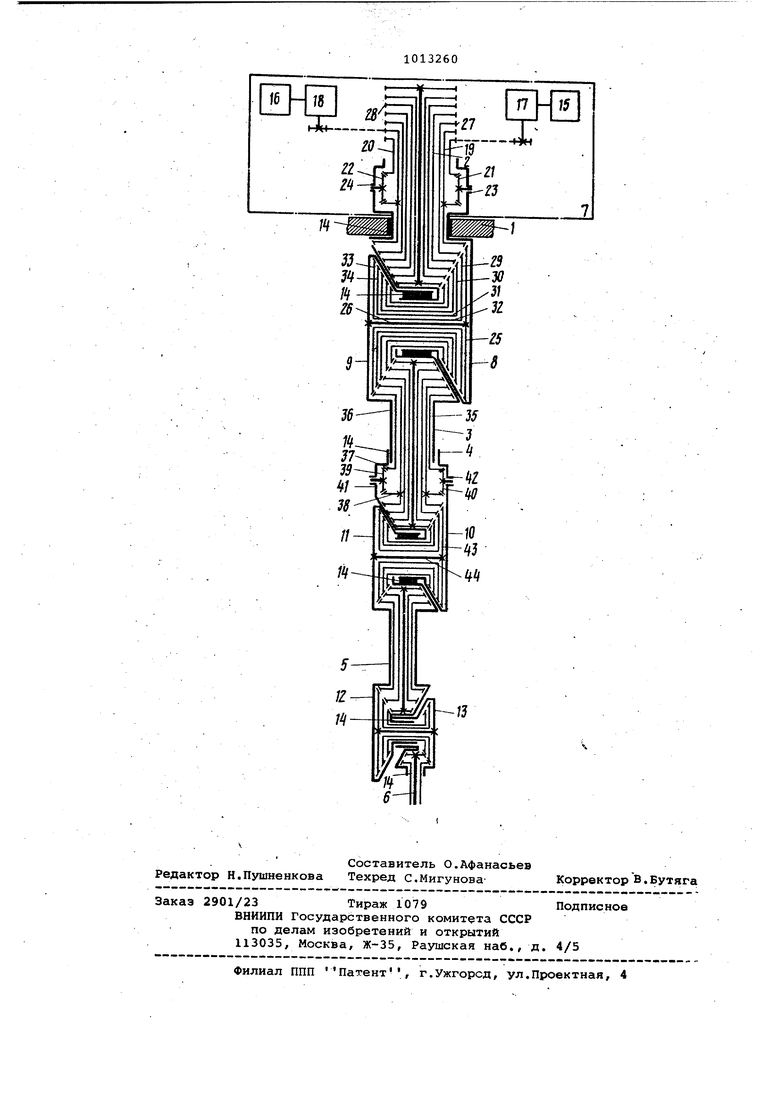
о Изобретение относится к облас)ти робототехники и может быть использовано для роботов, эксплуатируемых л . обычных и экстремальных ycлoвияk. Известен манипулятор, содержащий изолированный от рабочей зоны привод ной блок с силовыми элементами, механическую руку, состоящую из плечевого, локтевого и кистевого суставов соединительных элементов, валов, кинематически связанных силовыми элементами приводного блока, причем каж дый сустав содержит шарнирно соедине ные верхний и нижний звенья с коническими дифференциалами 1. Недостатками известного устройства являются ненадежная защита элемен тов суставов от воздействия агрессив |ной окружакяцей среды и низкий коэффи циент использования силовых элементо Целью изобретения является увеличение надежности и долговечности манипулятора. Цель достигается тем, что манипулятор, содержсиций изолированный от рабочей зоны проводной блок с силовы ми элементами, механическую руку, состоящую из плечевого, локтевого и кистевого суставов, соединительных элементов, валов, кинематически связанн -1Х с силовыми элементами приводного блока, причем каждый сустав содержит шарнирно соединенные верхний и нижний звенья с коническими дифференцигСлами, снабжен дополнительными сателлитами и серметичуыми конусообразными корпусами, при этом дополнительные сателлиты расположены на каж дом суставе и соединены с дифференциалом нижнего звена., а сателлиты дифференциала верхнего звена установ лены на валу по одну сторону от оси руки, при этом звенья каждого из сус тавов расположены в герметичных кону сообразных корпусах, причем корпуса рас;положены олин относительно другого под углом 180 при этом один конец вала закреплен в герметичном конусообразном корпусе нижнего звейа, а другой посредством дополнительного сателлита свободно установлен в корпусе верхнего звена. На чертеже изображена кинематичес кая схема устройства. Устройство содержит механииескую руку, смонтированную на основании i и состоящую из последовательно соеди ненных звеньев 2 - б с приводным бло ком 7, вынесенным за пределы рабочей зоны. Звенья оканчиваются герметичными корпусаийи 8-13. Корпуса 8-13 конфигурацию двух полых усеченных конусов, сопряженных по боковой поверхности таким образом, чтобы оси / конусов были взаимно перпендикулярны корпуса 8-13 звеньев 2-6 шарнирно соединены друг с другом и могут поворачиваться один относительно другого и относительно горизонтальных осей на угол ± НО Герметичность корпусов 8-13 обеспечивается уплотнениями 14, кинематические цели силовых элементов 15 и 16 плечевого сустава взаимно связаны через редуктор 17 и 18, ведущие валы 19 и -20, сателлиты 21 и 22 к замкнуты на корпус 8 через водила 23 и 24, Коническое колесо вала 19 входит в зацепление с сателлитом 25, вал которого 26 жестко связан с корпусом 9. Кинематические цепи силовых элементов локтевого сустава (не указан) транзитом проходят через плечевой сустав (ведущие валы 27 и 28, сателлиты 29 и 30, валы 31 и 32, сателлиты 33 и 34, валы 35 и 36). Валы 35 и 36 через конические зубчатые колеса 37 и 38 и сателлиты 39 и 40 взаимно связаны друг с другом, кинематические цепи силовых элементов локтевого сустава замкнуты на корпус 10 через водила 41 и 42. Коническое колесо вала 35 входит в зацепление с сателлитом 43, вал 44 которого жестко связан с корпусом 11. Силовые элементы кистевого сустава могут иметь аналогичные взаимосвйзи или могут работать раздельно. Устройство работает следующим образом. Если валы 19 и 20 плечевого, сустава повернутся в одном направлении на одинаковый угол, то сателлиты 21 и 22 останутся неподвижными, и механическая рука водилами 23 и 24 повернется на тот же угол (вращение в плече) . ;сли ведущие валы плечевого сустава 19 и 20 повернутся на. одинаковый угол и разных направлениях, то сателлиты 21 и 22 также повернутся на соответствующий угол, и движение сателлитов будет передано через сателлит 25, вал 26 на корпус 9 (изгиб плечевого сустава). И в том и в другом случаях моменты, развиваемые силовыми элементами 15 и 16, суммируются. Работа приводов локтевого сустава в принципе аналогична. Приводы кис тевого сустава обычно менее нагружены, поэтому здесь суммирование их моментов при движении не требуется. Предлагаемое техническое решение применимо и для приводов кисти. Устройство полностью герметизировано и при том же приводном блоке имеет большую грузоподъемность. Первое преим1тцество особенно существенно, если устройство эксплуатируется в экстремальных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипуляционное устройство | 1981 |
|
SU988544A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| РОБОТИЗИРОВАННЫЙ ТРЕНАЖЕР ДЛЯ ЛЮДЕЙ С НАРУШЕНИЯМИ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2604038C1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
МАНИПУЛЯТОР, содержэднй иэо лированный от рабочей зоны приводной блок с силовыми элементами, механи-. ческую руку, состоя1аую из плечевого, локтевого и кистевого суставов, соадинйтел1гных элементов, валов, ки аматически связанных с силовшш элементами приводного блока, причем кгикдый сустав содержит шарнирно соединенные верхний к нижний звенья с коническими дифференцигихами, отлич ающ и и с я тем, что, с целью увеличения надежности и долговечности, он снабжен дополнительными сателлитами и герметичными конусообразными корпусами, при этом дополнительные сателлиты расположены на каждом суставе к соединены с дифференциалом нижнего звена, а сателлиты дифференциала верхнего эвена установлены на валу по одну сторону от оси руки, при этом звенья каждого из суставов расположены в ге1 етичных конусообразньис корпусах, причем корпуса расположены один относительно другого под углом 180 при этом один конец вала закреплен в ге1и4етичн6м конусообразном корпусе нижнего звена, а другой посредством дополнительного сателли- ( та свободно установлен в корпусе верхнего звена.-л. с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Технические услрвия, 1975. | |||
