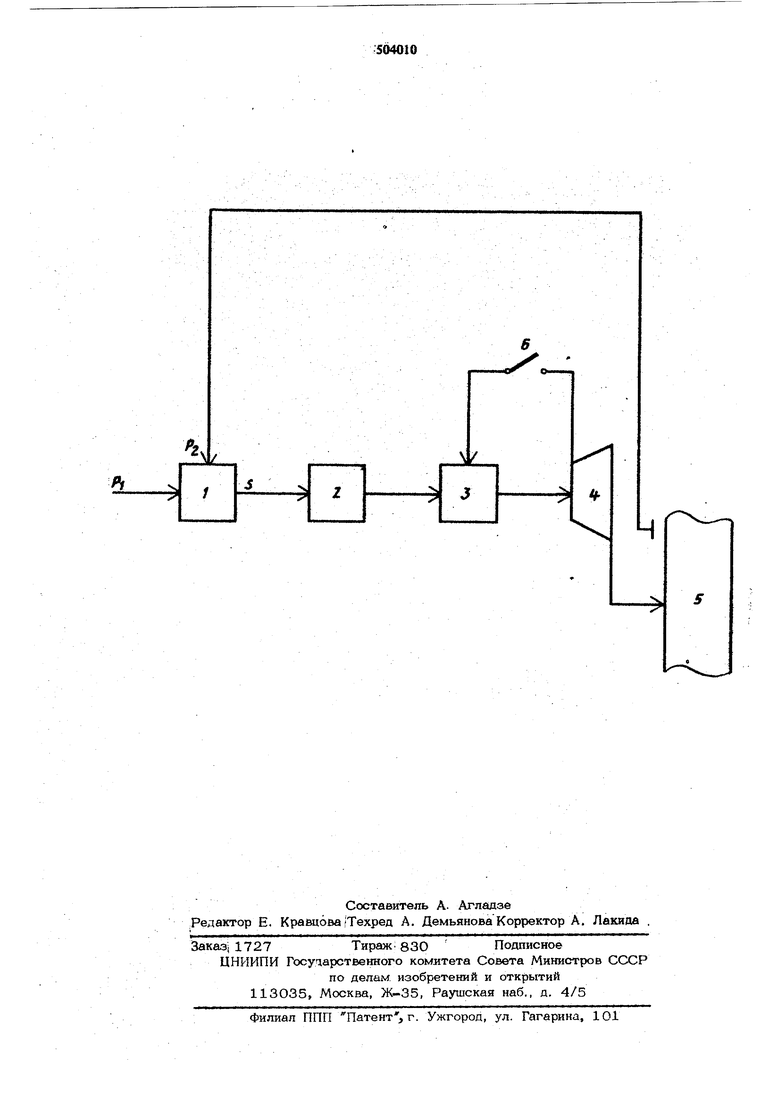
схема устройства, реализующего предложенный способ.
Заданное значение давления Pj вычитается из текущего значения давления Р2 в узле 1 вычитания, на выходе которого возникает сигнал разности, преобразующийся в регуляторе 2, после чего его в узле 3 сравнения сравнивают с сигналом, пропорциональным регулируемому параметру компрессора 4 и воздействуют на последний до снижения результата сравнения до минимальной величины. Изменение режима комг-, прессоров приводит к изменению давления в трубопроводе 5. Обратная связь по скорости, т.е. по регулируемому параметру может отключаться с помощью ключа 6.
Пусть в начальный момент имеется ошибка по давлению, превышающая заданный максимальный уровень. Тогда производится подключение ключом 6 обратной связи по скорости и режим компрессора быстро , изменяется до тех пор, пока в узле 3 срав нения не установится равенство. В результате изменения режима компрессоров начинает изменяться давление с темпом, определяемым динамическими характеристиками прилегающего участка газопровода. После того, как через некоторое время величина давлении стабилизируется,т.е. закончится процесс статического . регулирования, остается ощибка по давлению, которая компенсируется соответствующим приращением скорости вранГения компрессоров по сравнению с первоначальной, что фиксируется узлом 3 сравнения. Если давление остается постоянным в течение заданного интервала времени, прекращают «(равнение с сигналом, пропорциональным регулируемому параметру, размыкая ключ и резко уменьшаю быстродействие регуляторов до уровня постоянных пременИ нрллегающего участка газопровода. Возник шее на выходе узла 3 рассогласование приводит к тому, что скорость компрессоров будет медленно изменяться до тех Пор пока рассогласование устранится. Таким образом, процесс регулирования при перво начально большбм рассогласовании состоит из дэух этапов - статического регулиро- вания и, по истечении) заданного интервала времени после него, - устранения статической погрешности. Величина статической погрешности не влияет на г.онвчную точность поддержания давления и может гуьтбпраться, исходя из требуемого качества переходного процесса, при peajibHbix ха)актеристт1ках объекI .I регулирования.
Если ощибка по давлению не достигнет заданного максимального уровня, обратная связь по регулируемому параметру не включится и имеет место только второй этап продосса.
Естественно, что такой способ регулирования без контроля при малых р)К:согласо-. ваниях вели ины представительного параметра каждого компрессора мог бы привести к возникновению неоправданных различий режима отдельных компрессоров. Чтобы этого не происходило, периодически сравнивают режим каждого из компрессоров с режимом одного из них, произвольно выбранного в качестве ведущего. Для этого измеряют регулируемый параметр ведущего и контролируемого компрессоров и изменяют их режимы либо до равенства их параметров, либо до равенства параметра контролируемого компрессора с суммой параметра ведущего компрессора и индивидуального корректирующего сигнала, который позволяет учесть и.иивидуальные характеристики оборудования и место каждого компрэссора в технологической схеме. Например, центробежные компрессоры, стоящие в первой ступени сжатия, могут из экономических соображений нагружаться больще, чем остальные и т.д. 0,
Формула изобретения
1. Способ автоматического поддержания давления в объединенном выходном канале 5 группы компрессоров путем измерения разности заданного и текущего значений давления, сравнения этой разности с сигналом, пропорциональным регулируемому параметру, например скорости вращения, отдельного компрессора, и изменения параметра до достижения минимальной величины результата сравнения, отличающийся тем, что, с целью повыщеикя производителььости, точности и качества переходных процессов, сравнение производят после достижения разностью определенной величины и прекращают после того, как давление останется постоянным в течение заданного интервала времени, а при разност}, меньщей определенной величины, изменяют параметр до достижения минимальной величины разности и с меньшей скоростью .изменения, выбранной в соответствии с постоянной времени канала. 2. Способ по п. 1, о т л и ч а ю щ и йс я тем, что, с целью лучщей синхронизации работы компрессоров, параметр каждого компрессоре периодически корректируют в соответствии с параметром ко.тпресIcopa, ivfiiGpaiiitoro ведуитм.
/,
/V
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования давления на выходе группы совместно работающих компрессоров | 1973 |
|
SU727874A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2010 |
|
RU2446299C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2172419C1 |
| СПОСОБ АНТИПОМПАЖНОГО РЕГУЛИРОВАНИЯ КОМПРЕССОРНОЙ СТАНЦИИ | 2001 |
|
RU2210008C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| СПОСОБ УПРАВЛЕНИЯ ДОЗИРУЮЩЕЙ ИГЛОЙ РЕГУЛЯТОРА РАСХОДА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1989 |
|
SU1780364A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |