Изобретение относится к области систем управления сложными объектами техники, работающими в широком диапазоне режимов и нагрузок, и может быть использовано в системах управления газотурбинных двигателей, турбин электростанций, в которых для регулирования нескольких параметров используется одно управляющее воздействие.
Известен способ регулирования, согласно которому в каждом из ряда каналов формируют управляющие сигналы, пропорциональные отклонению текущей величины регулирующего параметра от заданной, выделяют в качестве ведущего канал с наименьшей величиной управляющего сигнала и осуществляют коррекцию заданной величины регулируемого параметра в каждом из каналов пропорционально рассогласованию между управляющим сигналом и управляющим сигналом ведущего канала с ограничением скорости коррекции заданной величины, причем ограничение скорости коррекции снимают при снижении управляющего сигнала ведущего канала (см. а. с. СССР N 1758260, кл F 02 C 9/26, 1992 г.) - наиболее близкий аналог.
В результате анализа известного способа необходимо отметить, что он в ряде случаев не позволяет осуществить эффективное регулирование параметров объекта так как, коррекция заданной величины в "дежурном" режиме осуществляется со статической ошибкой, а переход в "ведущий" режим при быстром изменении состояния объекта регулирования осуществляется с задержкой, равной постоянной времени цепи коррекции. Это приводит к дополнительной динамической ошибке в момент перехода в "ведущий" режим. Задачей настоящего изобретения является повышение точности управления многомерным объектом за счет уменьшения динамической ошибки при быстром изменении состояния объекта регулирования.
Поставленная задача обеспечивается за счет того, что в способе управления многомерным объектом, включающим формирование по каждому управляемому параметру при помощи регулятора параметра управляющих сигналов, сравнение значений этих сигналов, выбор сигнала с наименьшим значением и осуществление этим выходным сигналом регулирования исполнительного органа, новым является то, что управляющий сигнал как минимум по одному управляемому параметру, формируя путем суммирования выходного сигнала регулятора параметра и соответствующему этому параметру преобразованного выходного сигнала.
Под преобразованием выходного сигнала перед его суммированием с как минимум одним управляющим сигналом следует понимать, например, его дифференцирование, интегрирование, усиление или обработку динамическим звеном произвольной структуры.
При проведении патентных исследований не обнаружены решения, идентичные заявленному, а следовательно, заявленное изобретение соответствует критерию "новизна".
Сущность изобретения не следует явным образом из известных решений, а следовательно, заявленное изобретение соответствует критерию "изобретательский уровень".
Считаем, что сведений, изложенных в материалах заявки, достаточно для практического осуществления изобретения.
Сущность изобретения поясняется чертежами, где на фиг. 1 показана схема устройства, реализующего заявленный способ; на фиг. 2 - преобразователь для регулятора температуры; на фиг. 3 - преобразователь для регулятора частоты вращения свободной турбины.
Устройство управления многомерным объектом, посредством которого может быть реализован способ, выполнено в виде датчика 1 частоты вращения вала компрессора (не показан), соединенного с ПД-регулятором 2 частоты вращения вала компрессора; датчика 3 частоты вращения вала свободной турбины, соединенного с ПД-регулятором 4 частоты вращения свободной турбины (не показана), соединенного с сумматором 5; датчика 6 температуры (термопара) газов, например, перед свободной турбиной, связанного с ПД-регулятором 7 температуры газов, соединенного в свою очередь с сумматором 8.
ПД-регулятор 2, сумматоры 5 и 8 соединены с селектором 9 минимума, который через преобразователь 10, например интегратор, соединен с исполнительным механизмом (не показан). Преобразователь 10 через ограничитель 11 соединен также с датчиком 12 давления воздуха за компрессором. Выходной сигнал с преобразователя 10 через преобразователь 13 регулятора температуры газов и преобразователь 14 регулирования частоты вращения вала свободной турбины может быть подан на сумматоры 5 и 8.
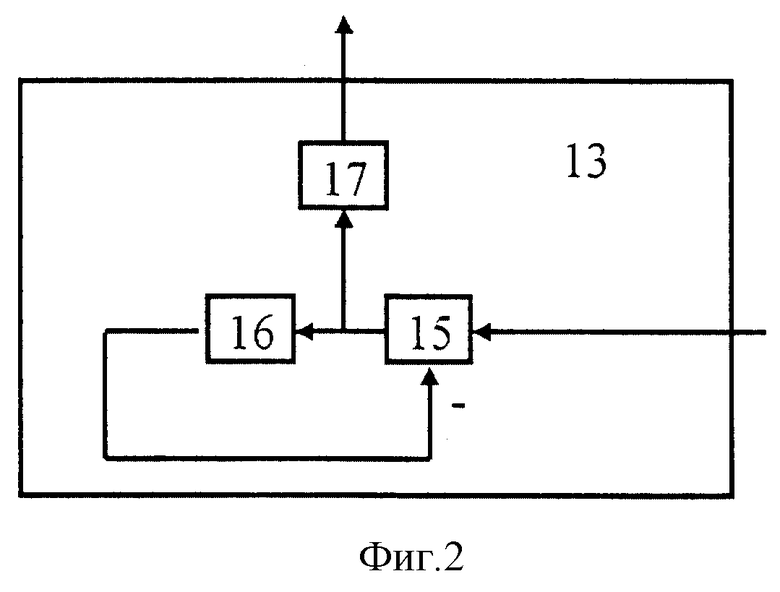
Преобразователь 13 для регулирования температуры может быть выполнен в виде сумматора 15, первый вход которого соединен с выходом интегратора 10, а выход - со входом интегратора 16 и через усилитель 17 с сумматором 8. Выход интегратора 16 соединен со вторым входом сумматора 15.
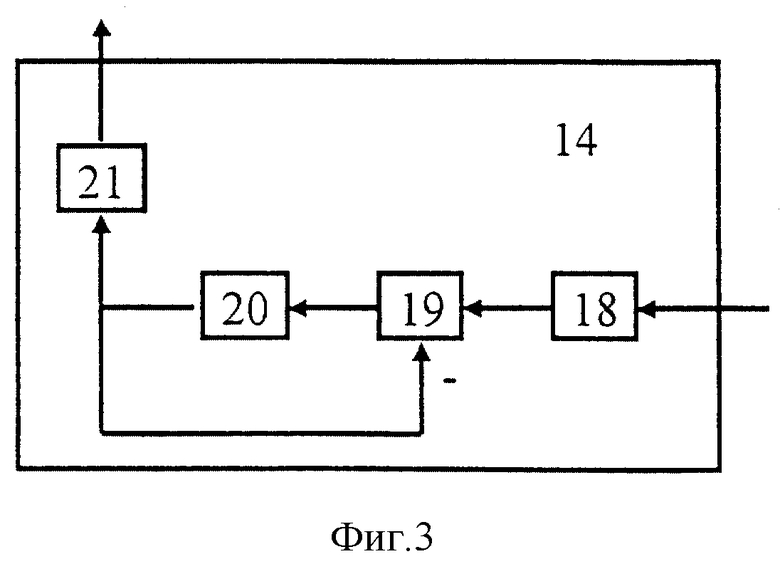
Преобразователь 14 для регулирования частоты вращения свободной турбины может быть выполнен в виде дифференциатора 18, вход которого связан с выходом интегратора 10, а выход - с первым входом сумматора 19, выход которого через интегратор 20 соединен со входом усилителя 21, а выход усилителя связан с сумматором 5. Выход интегратора 20 соединен также со вторым (вычитающим) входом сумматора 19.
Конструктивное выполнение элементов устройства является известным, оно не составляет предмета патентной охраны и поэтому в материалах не раскрыто.
Необходимо отметить, что в данном случае схема реализации способа позволяет управлять многомерным объектом по трем параметрам: частоте вращения вала компрессора; частоте вращения вала свободной турбины; температуре газа, например, перед свободной турбиной двигателя.
При контролировании (управлении) большего или меньшего числа параметров при функционировании многомерного объекта устройство принципиально не меняется.
Необходимо также отметить что, как это видно из схемы устройства, часть регулятора (2, 4, 7) может быть соединена с селектором 9 минимума непосредственно, а часть - через сумматор. Непосредственно соединяют, как правило, регуляторы параметров, для которых объект регулирования представляет собой инерционное звено первого порядка. Для таких параметров дифференциальный канал ПД-регулятора компенсирует инерционность объекта и при этом обеспечивается удовлетворительное качество регулирования. Способ управления предназначен для объекта регулирования, являющегося динамическим звеном выше первого порядка. В этом случае дифференцирующий канал ПД-регулятора не компенсирует полностью инерционность объекта и ПД-регулятора не всегда обеспечивает удовлетворительное качество регулирования, поскольку для обеспечения быстродействия необходимо применение дополнительной динамической коррекции.
Способ управления многомерным объектом осуществляют следующим образом. Работу рассмотрим на примере функционирования системы управления газотурбинного двигателя.
Выходной сигнал подключенного к датчику 1 частоты вращения вала компрессора ПД-регулятора равен сумме ошибки по частоте вращения и ее производной. Дифференцирующий канал ПД-регулятора компенсирует инерционность вала компрессора.
Выходной сигнал подключенного к датчику 3 частоты вращения вала свободной турбины ПД-регулятора 4 равен сумме ошибки по частоте вращения и ее производной. Дифференцирующий канал ПД-регулятора 2 компенсирует инерционность вала свободной турбины. На суммирующий вход сумматора 5 поступает сигнал ПД-регулятора 4, на вычитающий - выходной сигнал преобразователь 14.
Выходной сигнал подключенного к термопаре 6 ПД-регулятора 7 равен сумме ошибки по температуре и ее производной. Термопара представляет собой динамический объект, состоящий из двух включенных параллельно инерционных звеньев с отличающимися в (5-6) раз постоянным времени и в (2-3) раза коэффициентами передачи. Дифференциирующий канал ПД-регулятора 7 компенсирует запаздывание, вносимое первым инерционным звеном (с меньшей постоянной времени). На суммирующий вход сумматора 8 поступает сигнал ПД-регулятора 7, на вычитающий - выходной сигнал преобразователь 13.
Селектор 9 минимума выбирает минимальный из поступающих на его входы сигналов. Выходной сигнал селектора интегрируется интегратором 10. Подключенный к датчику давления за компрессором 12 ограничитель 11 формирует сигнал максимального расхода топлива. Ограничение сигнала интегратора обеспечивается воздействием на вход начальных условий интегратора. Выходной сигнал воздействует на исполнительный механизм (дозатор топлива в двигатель).
Сигнал с выхода интегратора 10 поступает также на преобразователь 14. Дефференциатор 18 формирует сигнал скорости исполнительного механизма. Сумматор 19 и интегратор 20, выход которого подключен к вычитающему входу сумматора, представляет собой инерционное звено. Постоянная времени интегратора 20 соответствует постоянной времени вала компрессора. Коэффициент передачи усилителя 21 выбран с учетом влияния частоты вращения компрессора на мощность свободной турбины. В результате при любом изменении режима работы двигателя преобразователь 14 формирует корректирующий сигнал, компенсирующий дополнительную инерционность, вносимую валом компрессора в контур регулирования свободной турбины. При этом корректирующий сигнал формируется как при активном регуляторе свободной турбины, так и в случае, когда селектор 9 выбирает сигналы других регуляторов или вступает в работу ограничитель расхода топлива. За счет этого, при вступлении в работу регулятора частоты вращения свободной турбины исключается динамическая ошибка.
Сигнал с выхода интегратора 10 поступает и на вход преобразователя 13. Сумматор 15 и интегратор 16, выход которого подключен к вычитающему входу сумматора, представляют собой инерционное звено. Постоянная времени интегратора 16 соответствует постоянной времени второго инерционного звена термопары. Коэффициент передачи усилителя 17 выбран с учетом соотношения коэффициентов передачи первого и второго инерционных звеньев.
При приемистости двигателя расход топлива быстро изменяется от расхода, соответствующего низкому режиму двигателя (например, от режима малого газа до максимального). Скорость изменения расхода ограничивается ограничителем 11. Выходной сигнал интегратора 16 запаздывает относительно расхода топлива на время, равное его постоянной времени. В результате на выходе сумматора 15 вырабатывается положительный сигнал разности, который в конечной фазе приемистости снижается с постоянной времени интегратора 16. Этот сигнал через усилитель 17 поступает на вычитающий вход сумматора 8, снижая выходной сигнал регулятора 7 температуры. Регулятор температуры раньше вступает в работу за счет чего устраняется динамическая ошибка по фактической температуре газов двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ТУРБОГЕНЕРАТОРНОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278464C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ПРИВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252329C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2466287C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ДОЗАТОРА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285140C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОДАЧИ ТОПЛИВА В КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2474711C1 |
| Способ управления двухвальным газотурбинным двигателем с регулируемыми направляющими аппаратами компрессора и вентилятора | 2018 |
|
RU2696516C1 |
| Способ управления подачей топлива в камеру сгорания газотурбинного двигателя | 2022 |
|
RU2786969C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634997C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА ДЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2006 |
|
RU2322601C1 |
Изобретение относится к системам управления сложных объектов техники, работающих в широком диапазоне режимов и нагрузок, и может быть использовано в системах управления газотурбинных двигателей, турбин электростанций, в которых для регулирования нескольких параметров используется одно управляющее воздействие. В соответствии со способом осуществляют формирование по каждому управляемому параметру при помощи регулятора параметра управляющих сигналов, сравнение значений этих сигналов, выбор сигнала с наименьшим значением и осуществление этим сигналом регулирования исполнительного органа объекта, причем управляющий сигнал как минимум по одному управляемому параметру формируют путем суммирования выходного сигнала регулятора параметра и соответствующего этому параметру преобразованного выходного сигнала. Изобретение позволяет повысить точность управления многомерным объектом. 3 ил.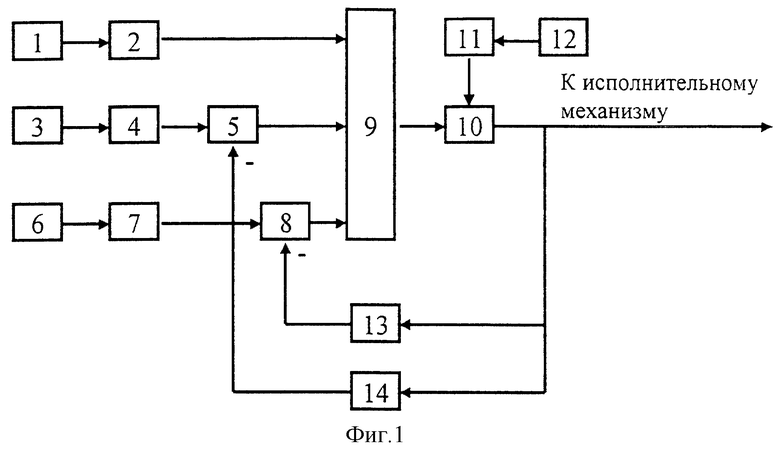
Способ управления многомерным объектом, включающий формирование по каждому управляемому параметру при помощи регулятора параметра управляющих сигналов, сравнение значений этих сигналов, выбор сигнала с наименьшим значением и осуществление этим выходным сигналом регулирования исполнительного органа объекта, отличающийся тем, что управляющий сигнал как минимум по одному управляемому параметру формируют путем суммирования выходного сигнала регулятора параметра и соответствующего этому параметру преобразованного выходного сигнала.

