СА5 00 00 00
го
05



| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |



Изобретение относится к области самонастраивающихся систем автоматического управления, может быть использовано для управления объектами в химической и других отраслях промышленности и является дополнительным изобретением к авт.св. № 1339494. Цель изобретения - повышение точности самонастраивающейся системы комбинированного регулирования при действии на объект управления с нестационарной статической характеристикой возмущений значительной интенсивности. Система содержит измеритель рассогласования 1, регулятор 2, сумматоры 3,4,5 и 6, объект управления 7, датчик внешнего возмущения 8, блок самонастройки 9, корректирующий фильтр 10, компенсатор 11, включающий блок обратной модели, блоки умножения, сумматор, блок коррекции, интегратор, управляемый ключ, блок памяти. Введение блока умножения с соответствующими связями позволяет решить задачу адаптации коэффициента передачи блока обратной модели при действии на нестационарньй объект управления 7 неконтролируемых воз- .мущений. 10 ил. i (Л
.
у«;
го
. Изобретение : относится к самонастраивающимся системам автоматического управления и может быть использовано для управления .объектами в химической и других отраслях промьшшенности.
Целью изобретения является повышение точности системы при действии на объект управления с нестационарн статической характеристикой возмущений значительной интенсивности.
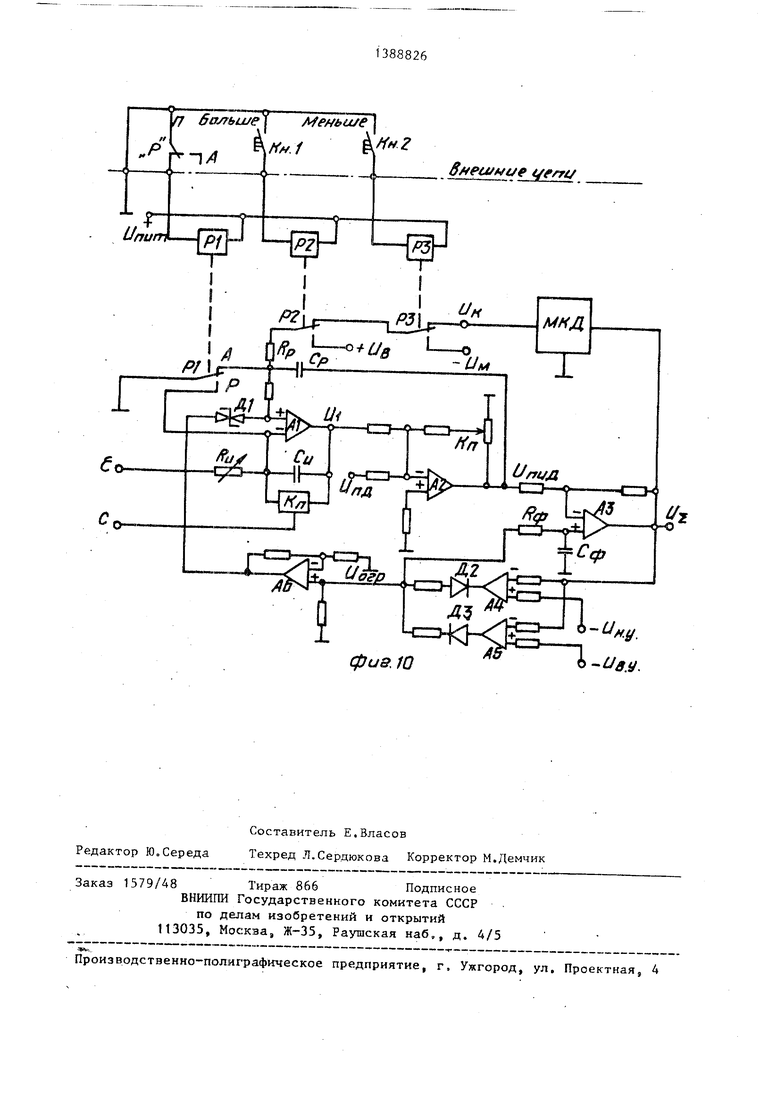
На фиг.1 представлена блок-схема предлагаемой самонастраивающейся системы комбинированного регулиро- вания; на фиг,2 - структурная схема системы; на фиг.З - основные цепи компенсатора, снижающие чувствитель ность системы к неконтролируемым возмущениям; на фиг„4 - 6 - блок- схемы реализации обратной модели объекта; на фиг,7 - блок-схема реализации логических блоков системы на фиг,8 - блок-схема реализации операции интегрирования на скользя- щем интервале} на фиг,9 - принципиальная схема пневматического ПИ- регулятора; на фиг.10 - электрическая схема ПИД-регулятора.
Система (фиг,1 и 2) содержит из- меритель Г рассогласования, регулятор 2, сумматоры 3 - 6,, объект 7 управления, датчик 8 основного внешнего контролируемого возмущения, блок 9 самонастройки, корректирующи фильтр 10, компенсатор 11, блок 12 выделения модуля, блок 13 дифференцирования, блок 14 выделения модуля блок 15 дифференцирования, блок 16 выделения модуля ,| логический блок 17, логический блок IBj, логически14 блок 19, логический блок 20, блок 21 вьщеления модуля, блок 22 делени управляемый ключ 23, блок 24 памяти блок 25 умножения,, блок 26 задержки блок 27 обратной модели объекта, блок 28 умножения,, блок 29 умножени сумматор 30, блок 31 коррекции, интегратор 32J управляемый ключ 33, блок 34 памяти.
Блок-схемы реализации обратной мо дели объекта (фиг,4 - 6) содержат пропорциональные звенья 35 и 36, инерционно-дифферениуарующее звено 37, сумматор 38, пропорциональное звено 39, инерционно-ди(})ференцирующее зве -но 40, сумматор 41, пропорциональное звено 42,. инерционно-дифференцирующее звено 43, сум1чатор 44, инерцион
520 25
ЗО Q , ., ,
35
, 50
55
ные звенья 45-47, блок 48 дифференцирования, пропорциональное звено 49, .сумматор 50, блок 51 дифференцирования, пропорциональное звено 52, сумматор 53, блок 54 дифференцирования, пропорциональное зьено 55, сумматор 56, пропорциональное звено 57,
Блок-схема реализации логических блоков системы (фиг,7) содержит компаратор 58, управляемый ключ 59, компаратор 60, управляемый ключ 61, компаратор 62, управляемый ключ 63, компаратор 64, управляемый ключ 65,
Блок-схема операции интегрирования на скользящем интервале (фиг,8) содержит блок 66 задержки, сумматор 67 и блок 68 инегрирования.
Принципиальная схема пневматического пи-регулятора (фиг.9) содержит злемент 69 сравнения, дроссельньй сумматор 70, элемент 71 сравнения, усилитель 72 мощности, элемент 73 сравнения, емкость 74, запорный клапан 75, отключающее реле 76,
На фиг,1-10 приняты следующие обозначения; Ay(t) - отклонение выходного сигнала от задания; С - управляющий сигнал; CQ - задание для первого логического блока; С, - зада- .ние для второго логического блока; С - задание для третьего логического блока; Cj - задание для четвертого логического блока; U,(t) - первый вьжодной сигнал регулятора; Un(t) - второй выходной сигнал регулятора (сигнал ПД-составляющей закона регулирования) ; Uj(t) - выходной сигнал разомкнутого контура; U(t) - совокупный управляющий сигнал разомкнутого и замкнутого контуров управления; X (t) - основное контролируемое возмущение; X(t) - вход объекта по каналу.управления; y(t) - выход объекта; 6(t - выход обратной моде- - ли объекта; X(t) - выход второго блока умножения; Xo(t) - выход третьего блока умножения,(т,е, оценка входа объекта; X(t), полученная посредством обратной модели с использованием самонастройки коэффициента ее передачи); f(t) - неконтролируемое возмущение; (t) - эквивалентное неконтролируемое возмущение, приведенное к объекта по каналу управления; f,(t) - вьпсод пятого сумматора; f (t) - выход блока коррекции
ЭК&
(оценка эквивалентного неконтролируемого возмущения, приведенного к входу объекта по каналу управления); f(t) - усредненная на скользящем интервале оценка f.Ct); fiCt) - вход второго блока памяти; X,(t) - выход датчика основнот о внешнего возмущения; .(t) - выходной сигнал блока 21; ) - выходной сигнал блока 12; jy,,(t) выходной сигнал блока 145 .5y.|-(t) - выходной сигнал блока 16; Р 5J, - сигнал, пропорциональный текущему значению регулируемого параметра; Рц командный сиг яал; Р J задание на регулятор ; ДД - регулируемый дроссель; ДИ - ре гулируемьй дроссель; Р а;,,.у - выходно сигнал регулятора; П - внешний перелючатель рода работы; Р; А - пейшмы работы регулятора Ручное Авто
Больше , Меньше - кнопки выбора знака приращения выходного сигнала в режиме ручного управления и„ут напряжение внутреннего источника питания; Р, Р,,, Рд - обмотки и контакты реле; Pv. , р резистор и конденсатор интегратора ручного управления; Ug, -U (-опорньге напряжения; МКЛ-- модуль компенсации дрейфа; Д, - двухаиоднь:й стабилитрон; А, -А f - операционные интег- ралькые уси-т- тели; R у нысокоомный переменный резне/гор интегратора; Си - конденс; тор интегратора; U - выходной сигнал интегратора (И-сос- тавляюп(ая); К - общий .коэффициент пропорциональности регулятора; Uny., суммарный сигнал П,, И, Д-составля- ющих закона регулирования; Кф, Сф - резистор и емкость апериодического звена (фильтра); U - сигнал-ограни читель выхода регулятора; Ugrp - выходной сигнал ограничителя; Д, Дэ диоды; Uf,,, U в сигналы ограниче ния выхода интегратора ручного управления на нижнем и верхнем уровня L - сигнал рассогласования заданно и текущего значения параметра; К, - электронный аналоговый ключ; S, - длительность интервала усреднения в блоке 321 f .(t-) - сигнал экг. запаздывающий на время . Система состоит из разомкнутого контура управления по возмущению, замкнутого контура по отклонению, цепей самонастройки разомкнутого контура, цепей расчета и компенсации эквивалентног о возмущения, приведенного к входу объекта по каналу управления, цепей адаптации коэффи
Q 5
0
5
5 д . .с
0
5
циента усиления обратной модели объекта.
Основное внешнее возмущение X t) поступает на первый вход объекта 7 и вход датчика 8, На первый вход измерителя 1 рассогласования поступает з лаюпгее воздействие q(t). На третьи входь логических блоков 17-20 поступают сигналы защаний, соответст- зеппо, GO 5 С, С 2 и С, На первый Еход первого логического блока 17 подается управляющий сигнал С, На третий вход объекта поступает неконт- pojinpyeMoe возмущение f(t). Замкнутый контур регулирования содержит последовптельно соединенные блоки 1, 2, 3; 6 и 7. охваченные отрица- обратной связью. Разомкнутьй KOiii ур регулирования включав последовательно соединенные блоки 8, 10, Зз 6 и 7. Выходами замкнутого и ра зомк,нутого контура являются соответственно сигналы U(t) и U,(t).
Нихге представлена последовательно работа разомкнутого, замкнутого контуров системы, а также работа компен- и цепей адаптации коэффициентов передачи разомкнутого контура и обратной модели объекта.
Разомкнутый контур работает следующим образом. В блоке 22 формируется сигнал отношения величин, пропор- циональ; ых входным переменным, кото- рь.й через управляемый ключ 23 поступает в первый блок 24 памяти. Сигналы, поступающие на первый и второй входы делителя 22, пропорциональны на практике (применитепьно, например к области химической технологии) дозировкам соответственно реагента и сырья. Поэтому отношение сигналов, поступающее в первый блок 24 памяти, пропорционально отношению дозировок реагента и сырья. Запись выходного сигнала блока 22 деления в блоке 24 памяти производится только в том случае, когда блок 9 самонастройки выдает управляюпщй сигнал С на открытие ключа 23. Выходной сигнал блока 24 памяти поступает в блок 25 умножения, в котором формируется выходной сигнал Uo(t) разомкнутого контура. Таким образом, выходной сигнал датчика 8 умножается в блоке 10 на некоторую величину (коэффициент передачи блока 10), которая между актами самонастройки корректирующего фршьтра 10 является величиной постоянной и хранится в блоке 24. При самонастройке блока 10 коэффициент передачи его изменяется скачкообразно, так как при наступлении состояния квазистатики новое отношение входньк сигналов делителя 22, пропорционально текущему соотношению дозировок реагента и сырья, пропускается через ключ 23 и запоминается в первом бло- ке 24 памяти. При работе системы все изменения величины X(t) будут в определенном соотношении, равном коэффициенту передачи блока 10, отслеживаться величиной U.j(t). Таким образом, корректирующий фильтр 10 представляет собой пропорциональное звено с переменным коэффициентом передачи, которьй имеет кусочно- постоянный характер,
Блок 9 самонастройки работает следующим образомЛфиг„2), Блок 17 служит для определения момента самонастройки, В блоках 18, 19 и 20 проверяются условия квазистатики та управления. Операции, выполняемые в блоках 17, 18, 19 и 20, описываются соответственно формулами (1-4).
t:) Со;
с
ал
(2) (3)
(4)
Сумма сигналов U(l:;) и f g (t) представляет собой реакцию замкнутого контура системы и цепей компенсации на действие всех ввдов возмущений, изменяюпщх выход объекта. Если модуль указанной суммы сигналов, получаемый в блоке 16, превышает некоторую заданную величину Со (1) и при этом объект находится в состоянии квазистатики, т,е, вьтолняются успо- вия (2,3,4), то управляющий сигнал С проходит первый 17,, второй 18, третий 19, четвертый 20 логические блоки и поступает на управляющие входы первого 23 и второго 33 управляемых ключей. Одновременно сигнал С поступает в регулятор 2, где обнуляет интегральную составляющую скгна ла U(t), Пусть для конкретности регулятор 2 реализует ПИД-закон регулирования, тогда
U,(t)B,dy(t)+Bj (Od
t -1+ В,
) dt
(5)
где В f Bj, Bj настраиваемые параметры регулятора, В результате акта самонастройки корректирующего фильтра 10 величина U(t) будет определяться следующей формулой:
U,(t)B,.y(t).-B3
(6)
Q , 0
5
0
5
0 5 0
Переход системь: в результате самонастройки корректирующего фильтра 10 на новое значение коэффициента его передачи, не вызывает возмущения входного сигнала X(t) объекта 7, При выполнении условий, проверяемых в блоках 17, 18, 19 и 20 системы, сигнал С открывает ключ 23, в результате чего сигнал U(t) после суммирования с r(t) и вычитания из него в сумматоре 5 величины, определяемой выражением (6), проходит блок 22 деления, первый управляемый ключ 23, записывается в блоке 24 памяти, проходит первый блок 25 умножения и в виде сигнала U(t) поступает на второй вход первого сумматора 3, Операция обнуления И-составляющей приведет к тому, что условие проверяемое в первом логическом блоке 17, не будет выполняться, в результате чего сигнал С не пройдет логические блоки 17, 18, 19 и 20 и управляемый ключ 23 закроется.
Таким образом, в первом блоке 24 памяти будет записано новое значение коэффициента передачи корректирующего фильтра 10. При этом выходной сигнал и ,(t) регулятора 2 будет уменьшен, а выходной сигнал и i(t) разомнутого контура увеличен на И-составляющую вькода регулятора, имевшую место в составе U,(t) перед моментом самонастройки. Второй выход и nftCt) рагу- лятора 2 определяется выражением (6), т.е, представляет собой ПД-составляю- щую сигнала U,(t), Сигнал U(t) вычитается в сумматоре 5 из сигнала U(t). Этим исключается двойное суммирование 1Щ-составляющей выхода регулятора 2 в сумматоре 3 и, следовательно, возмущение входа объекта. Цепь, связывающая второй выход регулятора 2 с вторым входом сумматора 5, позволяет повысить точность работы
системы за счет исключения возмущения входа объекта при адаптации фильтра 10, когда ПД-составляющая и(t) отлична от нуля. При дальней- г шей работе величины U(t) и г (t) , как реакции соответственно замкнутого контура и цепей компенсации системы на отклонения y(t) от задания
будут изменяться. Когда модуль ука- Ю занной суммы сигналов превзойдет заданную величину Ср, производится анализ условий квазистатики объекта управления. При наступлении квазистатичного состояния выполняется следую-15
щий акт адаптации фильтра 10. Величины С,
ч
С, являются априорно настраиваемьми параметрами блока 9. Изменение величины выхода регулятора 2 с течением времени характеризует изменение динамических характеристик канала управления И(ИЛИ) внешних условий функционирования системы. Величина модуля суммы сигналов U(t) и г (t) в состоянии квазистатики объекта 7 характеризует степень несоответствия управляющего сигнала X(t) величине основного контролируемого возмущения X,(t) в текущих условиях функционирования системы. В результате самонастройки фильтра 10 повышается качество компенсации на входе объекта возмущения X .j(t) и, следовательно, качество работы всей системы в целом, так как часть возмущений, которая до этого проходила через объект, увеличивала дисперсию выходного параметра и нагружала обратную связь, будет скомпенсирована на его входе.
Компенсатор 11 работает следующим образом.
Компенсатор 11 предназначен для определения и компенсации эквивалентного возмущения, приведенного к.входу объекта по каналу управления. Цепи компенсатора, изображенные совместно с замкнутым контуром управления (фиг.З), включает в себя блоки 26, 27, 30 и 31. Они являются основой компенсатора (фиг.1 и 2) и в них выполняется следующее: восстанавливается посредством блока 27 обратной модели вход объекта 7 из выходного сигнала объекта y(t), опреде.
20
25
30
35
40
45
50
Блок 28 умножения служит для получе- ния из M(t) оценки входного воздействия X(t) объекта 7.
Связь блока 32 с сумматором 5 служит для использования f(t) (скользящего среднего оценки эквивалентного возмущения) при адаптации коэффициента передачи корректирующего фильтра 10. Учет сигнала f(t), являющегося составной частью реакции объекта -на все виды действующих на его выход возмущений, позволяет повысить качество адаптации коэффициента передачи разомкнутого контура.
Цепь, включающая блоки 33 и 34, предназначена для образования второго канала прохождения сигнала f(t) с целью исключения при самонастройке блока 10 возмущения их входа объекта Связь выхода блока 31 коррекции с входом сумматора 4 предназначена для использования оценки эквивалентного возмущения f ) при определении необходимого условия адаптации, проверяемого в блоке 17, (фиг,2). Эта связь необходима, так как (t) является составной частью сигнала оперативной реакции цепей системы на изменения выхода объекта.
Ниже приведено обоснование введения блока 29 умножения в состав компенсатора 11,
Приняты следующие обозначения:
ti
t,4,два последовательных момента квазистатики объекта 7 (фиг,1 и 2), в которые происходит самонастройка фильтра 10, K,fi(t,.), (t.l Kp.Ct:.), К p,(t,.,,), K(ti), Kф(t,.,) «rf « ,--- - - - - , f - i . , - ff Y 1 KK T I T (
ляется разность действительного 5{(t) коэффициенты передачи объекта 7, раи восстановленного X(t) входов объектов посредством сумматора 30. Полученный сигнал разности пропускается
зомкнутого контура (блоки 8,10,7) и корректирующего фильтра 10 соответственно в моменты времени t.., t
1 +1
через блок 31 коррекции и суммируется с выходом регулятора с целью компенсации эквивалентного возмущения, приведенного к входу объекта по каналу управления. Модель объекта снимается по каналу У удобно тем, что модель, снятая по указанному каналу, позволяет учитывать изменения обоих входных воздействий объекта X(t) и X ,(t). Выходом блока 27 обратной модели является сигнал оценки:
M(t)
х(0 ,(t)
(7)
Блок 28 умножения служит для получе- ния из M(t) оценки входного воздействия X(t) объекта 7.
Связь блока 32 с сумматором 5 служит для использования f(t) (скользящего среднего оценки эквивалентного возмущения) при адаптации коэффициента передачи корректирующего фильтра 10. Учет сигнала f(t), являющегося составной частью реакции объекта -на все виды действующих на его выход возмущений, позволяет повысить качество адаптации коэффициента передачи разомкнутого контура.
Цепь, включающая блоки 33 и 34, предназначена для образования второго канала прохождения сигнала f(t) с целью исключения при самонастройке блока 10 возмущения их входа объекта. Связь выхода блока 31 коррекции с входом сумматора 4 предназначена для использования оценки эквивалентного возмущения f ) при определении необходимого условия адаптации, проверяемого в блоке 17, (фиг,2). Эта связь необходима, так как (t) является составной частью сигнала оперативной реакции цепей системы на изменения выхода объекта.
Ниже приведено обоснование введения блока 29 умножения в состав компенсатора 11,
Приняты следующие обозначения:
ti
t,4,два последовательных момента квазистатики объекта 7 (фиг,1 и 2), в которые происходит самонастройка фильтра 10, K,fi(t,.), (t.l, Kp.Ct:.), К p,(t,.,,), K(ti), Kф(t,.,)Y 1 KK T I T (
коэффициенты передачи объекта 7, разомкнутого контура (блоки 8,10,7) и корректирующего фильтра 10 соответственно в моменты времени t.., t
1 +1
9138882610
Поскольку объект нестационарен, то ента передачи указанной цепи необходимо ввести цепь адаптации. Этой
to цели служит блок 29 умножения и связь
выхода блока 24 памяти с вторым вхогде некоторая; положительная дом блока 29. В этом случае величина
K,.(t,)K,(t,).K,,(t,); (9) K ;(i;Ki(t,)K-,.K,,. . (16) K,.(t...,)K,(t,.,)(t,.)J10) д, K-;, K-;/K,(t). (17) В результате перестройки корректи- момента t;+,;
рующего фильтра 10 (в момент t. ) v f -
KO 3jU- i4t J
Kp,(t.,,)K,,(t), (11) - K(t,.)«,;K(t-)-/-.
10
10
так как цепи самонастройки ф иьтра 10 t, (t. Ж ,-К g- предназначены для стабилизации коэф- Ко, ахСсО .
фициента передачи разомкнутого кон- Введение цепи адаптации, состоя:тура. Следовательно, из (9), (10) ищей из блока 29 умножения и связи
(11) вытекает:выхода блока 24 памяти с вторым входом блока 29, позволяет ревгить задаK(t . ) йг K(t;) . (12)чу адаптации коэффициента передачи
2Sобратной модели в зависимости от изРассмотрим цепь, включаюш1ую блокименения коэффициента передачи объек7, 27 и 28. Выход блока 28 Х(11)та 7, что повышает точность оценки
представляет собой оценку входа бло-эквивалентного возмущения, приведенка по каналу управления. Блок 28 ум-ного к вкоду объекта по каналу управножения для удобства анализа замененления, а это повышает качество рабоблоком усиления. Для простоты приня-ты компенсатора, 11 и точность работы
то X ,(t j)X ,(t ,-),всей системы в целом,,
Kjg() X ,(t,-)К:1в, (13)Формула изобретения
Коэффициент передачи Кд, g цепи 35 Самонастраивающаяся система ком(блоки 7, 27 и 28) в момент tj Sбинированного регулирования по
. № 1339494, отличаюК о By(t ;)Koj(t j)-K J-К jgj (14)щ a я с я тем, что, с целью повышения точности системы при действии
где К - коэффициент усиления .на объект управления с нестационарной модели объектамной статической характеристикой воз- Для момента t;+, :мущений значительной интенсивности, . второй вход пятого сумматора соеди ot -1+1 - нен с выходом второго блока умноже ния через третий блок умножения,
Из сравнения данньт (14) и (15) сл€: iвторой вход которого соединен с выдует, что для стабилизации коэффици- ходом первого блока памяти.
-.
10
ifi)
Ж
LliJ
SffefjUMue t e/rt/
фиЗ.,y.
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
