Изобретение относится к электротехнике, в частности к способам автоматического регулирования перетоков мощности в энергосистемах.
Известно, что при объединении мощных энергосистем сравнительно слабыми межi системными связями переменного тока воз- |никают трудности с регулированием перетока мощиости по этим связям. При этом регулирование моищости перетока дол.жно быть увязано с регулированием частоты в объединяемых энергосистемах.
Известны способы регулирования межj системной связи, выполненной в виде асннхронной машины двойного питания путем , воздействия на момент приводного дваглтеля машины в зависимости от величины I отклонения перетока активной мощности 6т /заданной уставки
Известный способ обеспечивает парал:Лельную работу сетей с разными частота:мя в тех случаях, когда может не учитываться динамика взаимных колебаний объединяемых энергосистем и машины двойного питания. В то же время при использовании
гибкой вставки на межсистемных связях электроэнергетических систем наибольший Iинтерес представляет возможность обеспе чения требуемого управления перетоком i мощности по межсистемной связи в условиях аварийного переходного режима энергообъединения.
В таких режимах известный способ регулирования не обеспечивает требуемого в интересах энергообъединения управления перетоком мощности по связи, например сохранення постоянства активной мощности связи во время режима взаимных качаний объединяемых энергосистем.
Цель изобретения - повысить (качество рё5 7лйррвания в ввврийнь1х режимах.
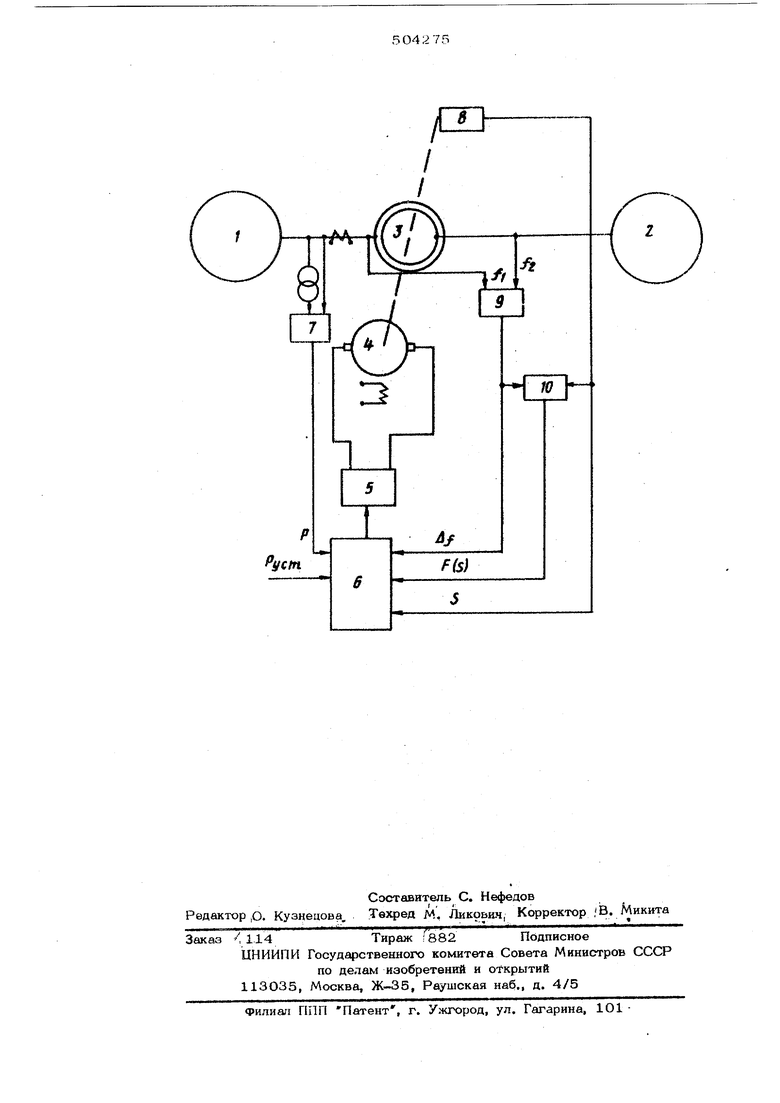
Для этого Измеряют частоты объединя. емых энергосистем и скорость вращения ipOTOpa машины двойного питания и сигнаI лами, один из которых пропорционален разности между величиной относительного скольжения энергосистем и скоростью вращения ротора, а другой - его произI водной, дополнительно воздействуют на Момент приводного двигателя машины. При этом закон регулирования момент приводного двигателя асинхронной машины может быть записан следующим образом fV in п ..1 Mp,t-Ki4P-P5 J4Kj pK,VC-V -Sp«rn ГД Р - текущее значейие мощности межоиствмной связи; Р - уставка регулятора по мощности уст, f fjM f j - т тяцив значения частот объединяемых энергосистем; fjj - номинальная частота; $мт. угловая скорость вращения ротора асинзфонной мащиньт в долях синхронной угловой скорости (Ш5 К-, К„, К„ - коэффициенты регулирования 1 л о Р -1 оператор дифференцирования. На чертеже дана схема устройства, реализующего пре;шагаемый способ, где 1 и 2 объединяемые энергосистемы, 3 - асинхронная машина двойного питания, 4 - приводной двигатели, 5 - регулир емый источник питания двигателя, 6 - сум мато, 7 - датчик активной мощности меж системной связи, 8 - электрический тахометр, 9 - измеритель относительного скольжения векторов напряжения статора и ротора асинхронноймашины, 1О - устро ство для образования; п|)ризводных. В сумм.аторе производится суммирование с определенными коэффициентами величин Р, Руст. Af - fi-fa . « также производных разности -т- - S Управляющий сигнал, получаемый на выходе сумматора, воздействует на изменение тока (напряжения) питания приводного двигателя, который осуществляет вращение ротора машины двойного питания со скоростью, равной скольжению - (в уопнюшгашемря режвА4е,. Формула изобретения Способ регулирбванйя межсистемной связа, выполненной в виде асинхронной машины двойного питания путем воздействия на мх)мент прдводного двнгателя машины в завис1|мсюти of велнчины отклонения перетока акт1шной мощности от заданной уставки, о т лТГ а ю ш и и с я тем, что, с келью поиашенпя качества регулировйн1яй в ав ийных режимах, измеряют частоты объединяемых ашергосистем и скорость вращения ротора машины двойного питания и ейгналами, один из которых пропорционален разности между величиной относительного скольжения энергосистем и ско-г ростью вращения JpOTOpa, а другой - его производной, дополнительно воздействуют на момент приводного двигателя машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для гибкой связи энергосистем | 1982 |
|
SU1053216A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для связи двух энергосистем (его варианты) | 1984 |
|
SU1431005A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU790066A1 |
| Устройство для объединения энергосистем | 1974 |
|
SU520662A1 |
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Способ предотвращения нарушения статической устойчивости линии электропередачи | 1977 |
|
SU699608A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1576976A1 |
| Устройство для связи и регулирования двух энергосистем | 1971 |
|
SU439048A1 |