Изобретение относится к электротехнике, а именно к устройствам для связи энергосистем, и может быть использовано для управления асинхрони- зированным электромеханическим преобразователем частоты (АС ЭМПЧ) в так называемых консольных режимах, при которых нарушена электрическая связь между мощной энергосистемой и одной из машин АС ЭМПЧ.
Цель изобретения - повышение эффективности управления АС ЭМПЧ путем расширения области устойчивости в консольном режиме.
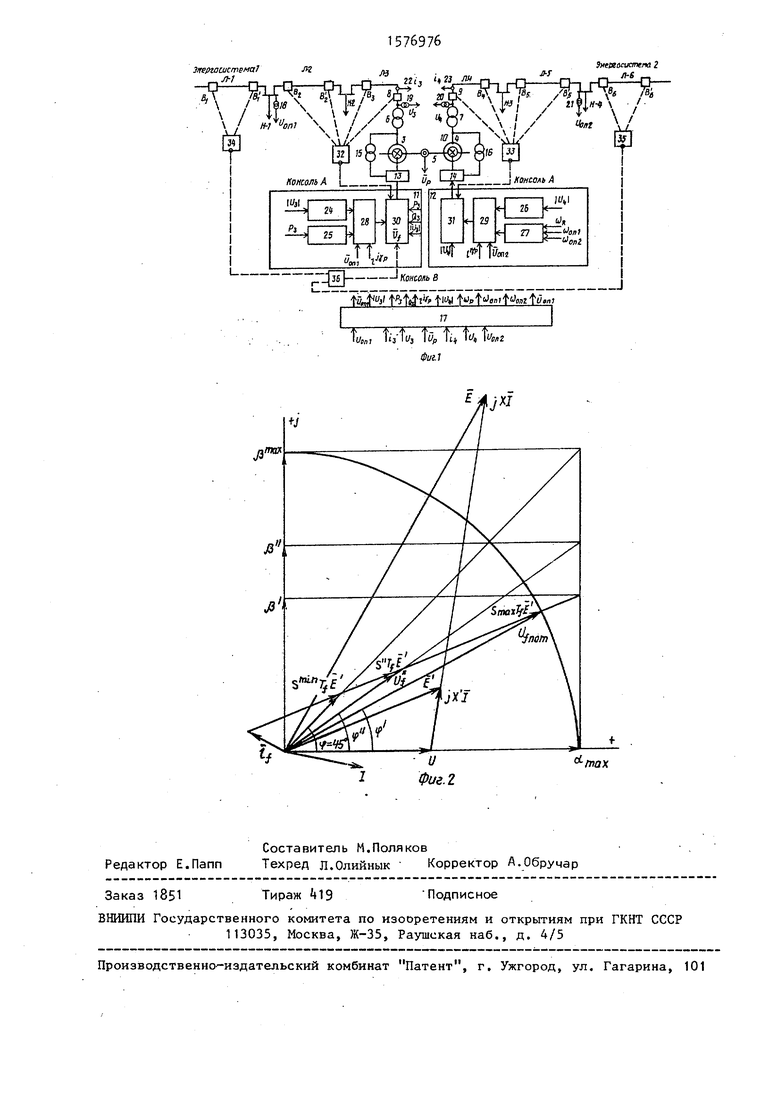
На фиг. 1 представлена схема межсистемной связи (МСС) с АС ЭМПЧ и системой регулирования; на фиг. 2 - векторная диаграмма асинхронизирован- ной синхронной машины (АСМ), работающей на выделившийся энергорайон.
Две энергосистемы 1 и 2 соединяются МСС переменного тока, в рассеч ку которой включен АС ЭМПЧ, который состоит из двух АСМ 3 и k, соеди ненных общим валом 5. АСМ 3 и 4 подключены к линиям электропередач посредством трансформаторов 6 и 7 связи и выключателей 8 и 9. На одном валу с АСМ находится углоизмерительная ма шина 10. Регулирование режима АС ЭМПЧ осуществляется с помощью регуляторов 11 и 12, выходы которых подключены к управляющим входам преобразователей 13 и 1 частоты с непосредственной связью (ПЧНС). Питание ПЧНС осуществляется от вторичных обмоток трансформаторов 15 и 16, первичные обмотки которых подключены к статорным цепям АСМ. Первичная информация о режиме АС ЭМПС и МСС поступает в блок 17 датчиков режимных параметров от трансформаторов 18-21 напряжения и трансформаторов 22 и 23 тока. Каждый регулятор 11 и 12 состоит из двух пропорционально-инте - рально-дифференцированных (ПИД) пре- образователен 2k, 25 и 26, 27, преобразователей 28 и 29 координат и блоков 30 и 31 ограничения напряжения функций регулирования Выходы блоков 30 и 31 ограничения напряжения функций регулирования являются выходами регуляторов 11 и 12. На входы ПИД преобразователей 2k и 25 поступают сигналы от блока 17 датчиков режимных параметров о модуле напряжения и значении активной мощности АСМ 3. На входы ПИД преобразователей 26 и 27 поступают сигналы о модуле напряжения на шинах АСМ kf частотах точек энергосистем, напряжения которых используются в качестве опорных, и сигнал о частоте вращения вала 5 АС ЭМПЧ. Таким образом, на выходе ПИД преобразователей 2k и 26 формируются сигналы регулирования, обеспечивающие равенство изме- ренных напряжений соответствующим уставкам на выходе ПИД преобразователя 25 формируется сигнал регулирования, обеспечивающий равенство измеренной активной мощности и уставки; на выходе ПИД преобразователя
10
5
.20
25
27формируется сигнал регулирования, обеспечивающий частоту вращения вала АС ЭМПЧ, равную средней частоте опорных напряжений. В преобразователях
28и 29 координат происходит формирование функций регулирования АС ЭМПЧ на частоте скольжения, для этого на входы преобразователей координат поступает информация об опорных напряжениях и об угловом положении ротора от машины 10.
Информация о состоянии выключатеэ
В
4
В
s
лей МСС В,, В,, Вг, В, В, а, Ъ 5, В, В, соответствующая информации о наступлении консольного режима, поступает на логические схемы И-НЕ 32-35. Так, на выходе логической схемы 32 сигнал логической 1 соответствует случаю консольного режима со стороны АСМ, управляемой по активной мощности, без принадлежности выделившемуся энергорайону точки энергосистемы, напряжение которой используется в качестве опорного напряжения, На выходе логической схемы 33 сигнал
логической 1 появляется в аналогичном случае, но при консольном режиме со стороны АСМ, управляемой по скорости вращения вала. Условно такой режим работы назовем Консоль А. Сигналы логической единицы на выходах логических схем 3k и 35 будут наблюдаться в случае принадлежности указанных точек энергосистем автономным энергорайонам со стороны АСМ, управляемой соответственно по активной мощности и по скорости вращения вала. Данный режим работы будем называть режимом Консоль В.
I
Блоки 30 и 31 осуществляют ограничение напряжения влзбуждения по закону, обеспечивающему круговое вращающееся поле, например согласно следующей зависимости:
(1)
- Гп{,если IUJI ,UW
. 1BJ сли ,T. При этом напряжение Vr Пот формируется по выражениям, зависящим от режима работы МСС:
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты для связи двух энергосистем | 1986 |
|
SU1411881A1 |
| Способ управления устройством для связи двух энергосистем | 1986 |
|
SU1411882A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1598041A1 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты | 1987 |
|
SU1510047A2 |
| Устройство для управления асинхронизированным электромеханическим преобразователем частоты (его варианты) | 1984 |
|
SU1246239A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| АСИНХРОНИЗИРОВАННЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ | 1990 |
|
RU2020689C1 |
| Устройство для связи двух энергосистем | 1987 |
|
SU1529351A2 |
| Устройство для связи двух энергосистем | 1985 |
|
SU1293788A1 |
Изобретение относится к области электротехники, более конкретно к устройствам для связи энергосистем, и может быть использовано для управления электромеханическим преобразователем частоты в так называемых "консольных" режимах, при которых нарушена электрическая связь между мощной энергосистемой и одной из машин преобразователя. Целью является повышение эффективности управления преобразователем путем расширения области устойчивости в послеаварийном режиме. В нормальных режимах работы, т.е. в случае наличия электрической связи между энергосистемами, одна из машин осуществляет регулирование перетока активной мощности через преобразователь, другая машина осуществляет регулирование скорости вращения вала. Кроме того, каждая машина осуществляет регулирование напряжения в точках подключения. При отключении участков линии и переходе преобразователя в режим работы на выделившийся энергорайон фиксируют принадлежность или непринадлежность точки энергосистемы, напряжение которой используется как опорное выделившемуся энергорайону. После этого ограничивают напряжение возбуждения до заданного значения. При этом уровень ограничения в двух упомянутых случаях различен и определяется параметрами режима. 2 ил.
.c если нормальный режим работы МСС
K4U + K jdUdt, если Консоль А
U Ks- S + KjJ Sdt, если Консоль В и U 1Ь
U
мин
если Консоль В и U Ј U{
(2)
мин
WHH
где
uf
1 ллин
Q2-x-x
+ P
XX
P
QU x sintf - S - скольжение машины, управ-, ляемой по активной мощности;P, Q активная и реактивная
мощности АСМ, управляемой по активной мощности, при работе АС ЭМПЧ на консольную нагрузку; if - угол между опорным напряжением АСМ и напряжением возбуждения.
Для пояснения указанных зависимостей обратимся к векторной диаграмме (фиг. 2) АСМ 3, управляемой по активной мощности, при этом АСМ, питающая выделившийся энергорайон, использует в качестве опорного напряжения напряжение точки, принадлежащей выделившемуся энергорайону. Из векторной диаграммы видно, что осуществляя, рцэаничение напряжения возбуждения от %мяксдо Uf „н режим АСМ существует при меньших значениях скольжения S и тем самым при меньшем отклонении частоты в выделившемся энергорайоне. Таким образом, изменением значения Uf n(JT осуществляется изменение отклонения частоты. При этом для исключения колебаний режимных
()
(х
X COS Ц - r о
- (3)
ю
UJsin
Если нарушение электрической связи произошло между машиной АС ЭМПЧ и точкой энергосистемы, напряжение которой используется как опорное, то в установившемся режиме частота напряжения на шинах АСМ должна быть равна частоте опорного напряжения, независимо от закона управления АС ЭМПЧ. Однако и в этом случае АСМ теряет способность изменять электромагнитный момент, что приводит к ра- 15 боте АСМ на потолочном ограничении напряжения возбуждения и соответствен но к повышению напряжения на шинах АСМ. Осуществляя ограничение напряжения возбуждения в функции от напря- 20 жения на шинах АСМ возможно осуществить регулирование напряжения. Причем такое регулирование отличается от регулирования по ф азе, принятого в известном способе, тем, что в характеристическое уравнение не входят составляющие, пропорциональные указанной фазе, т.е. обеспечивается устойчивость в диапазоне изменения фазы + 180°.
Устройство, реализующее способ управления АС ЭМПЧ, работает следующим образом., .
В нормальных режима;; работы I MCC, т.е. в случае наличия электрической
25
30
параметров необходимо обеспечить кру- 35 С8ЯЗИ между АСМ 3 и А и энергосистемами 1 и 2, одна из АСМ, в данном случае 3, осуществляет регулирование перетока активной мощности через АС ЭМПЧ, вторая АСМ осуществляет реговое вращающееся поле ротора, что осуществляется с помощью, например, реализации зависимостей (1). Из векторной диаграммы видно, что снижать напряжение возбуждения можно лишь до определенного значения UfMkW, которое характеризуется тем, что напряжение регулирования в канале напряжения стало равно максимальному значению /3/иакс Определить значение f. мин можн° разрешив с помощью теоремы синусов треугольник ABC при заданном угле . Это позволяет получить выражение (3), для которого, при ограничении напряжения возбуждения по схеме фиг. 1, т.е. после преобразователя координат, следует принимать if 5° при набросе активной мощности и t 135° при сбросе. Если осуществлять ограничение напряжения регулирования после ПИД преобразователя 25, то ц 90° как в случае наброса, так и сброса активной мощности.
XX
P
,
()
(х
X COS Ц - r о
- (3)
ю
UJsin
Если нарушение электрической связи произошло между машиной АС ЭМПЧ и точкой энергосистемы, напряжение которой используется как опорное, то в установившемся режиме частота напряжения на шинах АСМ должна быть равна частоте опорного напряжения, независимо от закона управления АС ЭМПЧ. Однако и в этом случае АСМ теряет способность изменять электромагнитный момент, что приводит к ра- 15 боте АСМ на потолочном ограничении напряжения возбуждения и соответственно к повышению напряжения на шинах АСМ. Осуществляя ограничение напряжения возбуждения в функции от напря- 20 жения на шинах АСМ возможно осуществить регулирование напряжения. Причем такое регулирование отличается от регулирования по ф азе, принятого в известном способе, тем, что в характеристическое уравнение не входят составляющие, пропорциональные указанной фазе, т.е. обеспечивается устойчивость в диапазоне изменения фазы + 180°.
Устройство, реализующее способ управления АС ЭМПЧ, работает следующим образом., .
В нормальных режима;; работы I MCC, т.е. в случае наличия электрической
25
30
С8ЯЗИ между АСМ 3 и А и энергосистемами 1 и 2, одна из АСМ, в данном случае 3, осуществляет регулирование перетока активной мощности через АС ЭМПЧ, вторая АСМ осуществляет регулирование скорости вращения вала. Кроме того, каждая АСМ осуществляет регулирование напряжения в точках подключения. Для формирования напряжения возбуждения АСМ в преобразователях 28 и 29 координат используются опорные напряжения, измеренные с помощью трансформаторов 18 и 21 напряжения промежуточных подстанций. При отключении участков Л-1 или
Л-6 МСС на выходе одной из логических схем И-НЕ 3 и 35 и схемы ИЛИ 36 появится сигнал логической 1, что характеризует режим работы АС ЭМПЧ как Консоль В. По указанному сигналу в блоке 30 ограничения напряжения возбуждения будет сформировано значение UЈ дот f(S) по выражению (2) и ограничено напряжение возбуждения до этого значения согласно со1
отношению (1), но не н иЈмин вычисленного по
При отключении учас Л-3 на выходе схемы 32 сигнал логической 1, щий режиму Консоль А лизирующий непринадлеж энергосистемы, напряжепользуется как опорное энергорайону. По указа в блоке 30 ограничени возбуждения будет сфорчение UЈnoT f(U3) и напряжение возбуждения чения. (
Аналогичные действидаться при отключении Л- и Л-5, приводящих напряжения возбуждения помощью блока 31 .огран , Таким образом, исполагаемого управления ществить регулирование метров АС ЗМПЧ в консо без изменения основных лирования и обеспечить работу во всем диапазо
ф ормула изобретения
Способ управления асинхронизиро- ванным электромеханическим преобразователем частоты (АС ЭМПЧ), заключающийся в том, что измеряют активную мощность одной из машин, сравнивают ее с уставкой, формируют сигнал регулирования активной мощности, обеспечивающий равенство измеренной активной мощности и уставки, измеряют напряжения на шинах АС ЭМПЧ, сравнивают их с уставками, формируют сигналы регулирования напряжений, обеспечивающие равенство измеренных напряжений соответствующим уставкам, измеряют напряжения точек энергосистем для использования в качестве опорных напряжений при формировании функций регулирования АС ЭМПЧ, формируют сигнал, пропорциональный угловому положению вала АС ЭМПЧ, формируют функцию регулирования машины, управляемой по активной мощности, путем преобразования координат сигнала регулирования активной мощности и соответствующего данной машине сигнала регулиро- - вания напряжения сигналами соответствующего опорного напряжения и углового положения вала, воздействуют на возбуждение данной машины в со8
Q
5
0
5
0
5
0
5
0
5
ответствии с сформированной функцией регулирования, измеряют частоты опорных напряжений, измеряют частоту вращения вала, сравнивают ее со средней частотой опорных напряжений, формируют сигнал регулирования частоты, обеспечивающий частоту вращения вала АС ЭМПЧ, равную средней частоте опорных напряжений, формируют функцию регулирования машины, управляемой по частоте, путем преобразования координат сигнала регулирования частоты и соответствующего данной машине сигнала регулирования напряжения сигналами соответствующего опорного напряжения и углового положения вала, воздействуют на возбуждение второй машины в соответствии с сформированной функцией регулирования, контролируют наступление консольного режима, фиксируют наступление консольного режима, фиксируют машину, питающую выделившийся энергорайон, отличающийся тем, что, с целью повышения эффективности управления АС ЭМПЧ путем расширения области устойчивости в консольном режиме, дополнительно в консольном режиме определяют принадлежность выделившемуся энергорайону точки энергосистемы, напряжение которой используется как опорное, oi- раничивают сформированную функцию регулирования, причем в случае принадлежности указанной точки энергосистемы выделившемуся энергорайону сравнивают частоту опорного напряжения машины, питающей выделившийся энергорайон, с максимально допустимым значением, ограничивают сформированную функцию регулирования машины, управляемой по активной мощности до тех пор, пока частота опорного напряжения не станет равной максимально допустимому значению, или до тех пор, пока величина функции регу лирования не станет равна минимальной величине функции регулирования, при которой обеспечивается равенство измеренного напряжения заданному значению, в случае если указанная точка энергосистемы не принадлежит выделившемуся энергорайону, ограничивают сформированную функцию регулирования машины, питающей выделившийся энергорайон до тех пор, пока измеренное напряжение данной машины не станет равно заданному значению.
3/reptocjucmenaJ
J3
яш
j3
$Htteaaxmcna 2 Л-6
Коншьв
fi t/ 7tPjttJ lij tU t t n t «tJ.nT
)7j
1yM; TtyT(/j 1й„ 1ц 14 |Уиг Фиг
J
| Зеленохат Н.И., Кокорев Н.Л., Лаказов К.З | |||
| Управление режимами гибкой межсистемной связи с АС ЭМПЧ | |||
| Рукопись деп | |||
| в Информэнерго, 1983, № - дэн, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ( СПОСОБ УПРАВЛЕНИЯ АСИНХРОНИЗИРО- ВАННЫМ ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | |||
