поворотными опорами, управляющим блоком и приводом с двигателем и магнитными муфтами.
Недостатком известных устройств является необходимость выноса перемещаемого в наружных направляющих управляющего блока за пределы опор для изменения центра тяжести и осуществления процесса зашагивания. Такое выполнение увеличивает габариты устройства и при перемещении особенно в труднопроходимых подводных условиях снижает надежность движения.
Предлагаемое устройство снабжено емкостями, расположенными у опор, которые соединены подводящими и отводящими трубопроводами через управляющую систему и заполнены жидкостью и газом.
Такое выполнение позволяет не перемещать центр тяжести механизма и не выносить его за пределы опор.
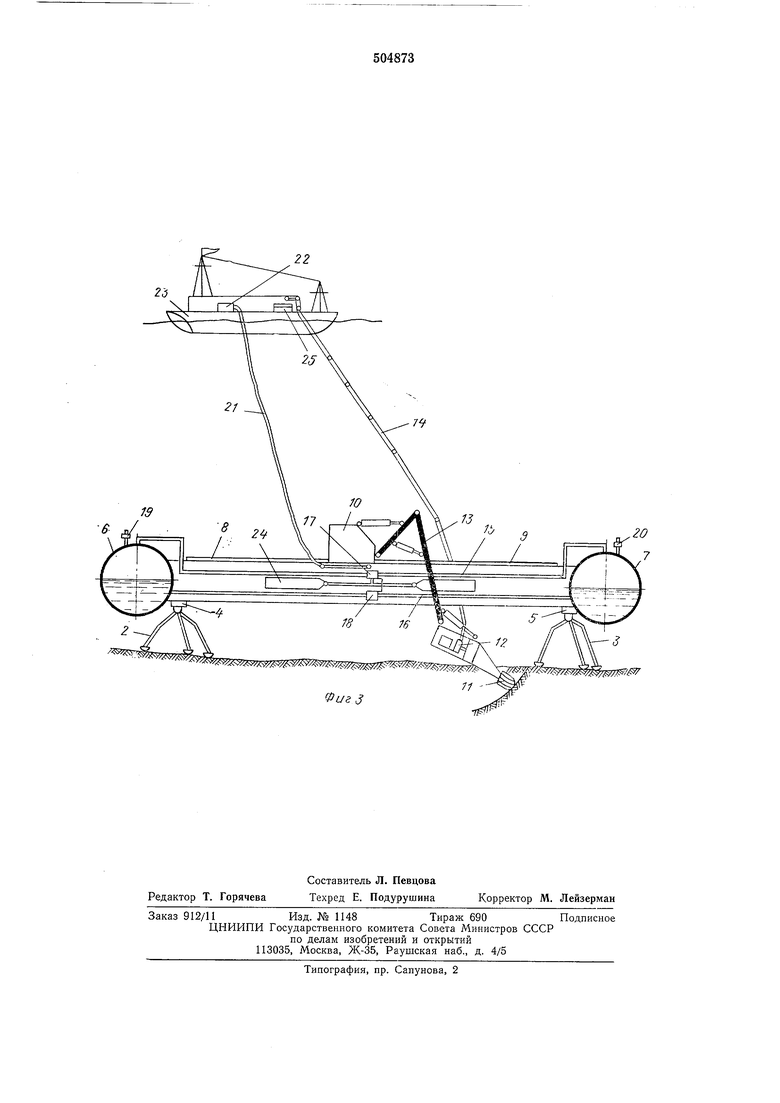
На фиг. 3 изображено устройство для осуществления способа движения машин.
Устройство состоит из корпуса 8 в виде, например, штанги с наружными направляющими 9, опорами 2 и 3, поворачивающимися посредством узлов 4 и 5 разворота, и управляющего блока 10 с механизмом его перемещения.
Управляющий блок 10 выполнен в виде добычного подводного агрегата, перемещающегося при разработке грунта по корпусу 8 в наружных направляющих 9.
Управляющий добычным органом блок 10 - добычный агрегат выполнен с грунтозаборным органом 11, гидротранспортирующим оборудованием 12, подвесным грунтозаборным органом 13 и пульповодом 14.
Устройство снабжено емкостями 6 и 7, размещенными у опор 2 и 3 п соединенными подводящим 15 и отводящим 16 трубопроводами через управляющие системы 17 и 18. Емкости заполнены при опущенных на поверхность дна опорах наполовину жидкостью и газом. В верхней части емкостей 6 и 7 размещены стравливающие управляемые клапаны 19 и 20, которые при соответствующей команде могут впускать в емкости заборную воду. Нодача газа осуществляется по шлангу 21 от компрессора 22 с борта судна 23 обеспечения. Для придания автономности устройству и независимости от питания газом от компрессора на нем может быть смонтирован блок автоматики с баллонами 24 сжатого газа или насос для напорной перекачки жидкости из одной емкости в другую.
В качестве жидкости может применяться, как заборная вода (морская), так и тяжелая жидкость - тетраброэтан, ртуть и т. п.
Выдача добытого полезного ископаемого на обогатительное устройство 25 на судне 23 от гидротранспортирующего оборудования 12 осуществляется по гибкому пульповоду 14.
В качестве узлов разворота опор и управляющего блока 10 с механизмом его перемещения могут быть использованы известные гидравлические, пневматические и т. п. силовые цилиндры.
Работает устройство следующим образом. Управляющий добычным органом блок 10, перемещаясь в направляющих 9 вдоль корпуса В, отрабатывает полосу месторождения
и гидротранспортирующим оборудованием 12 по пульповоду 14 выдает на обогатительное устройство 25 судна обеспечения. На устройстве могут быть применены два агрегата (один - для вскрыщных работ, другой -
для добычных), и грунт может подаваться в отвал за пределы месторождения.
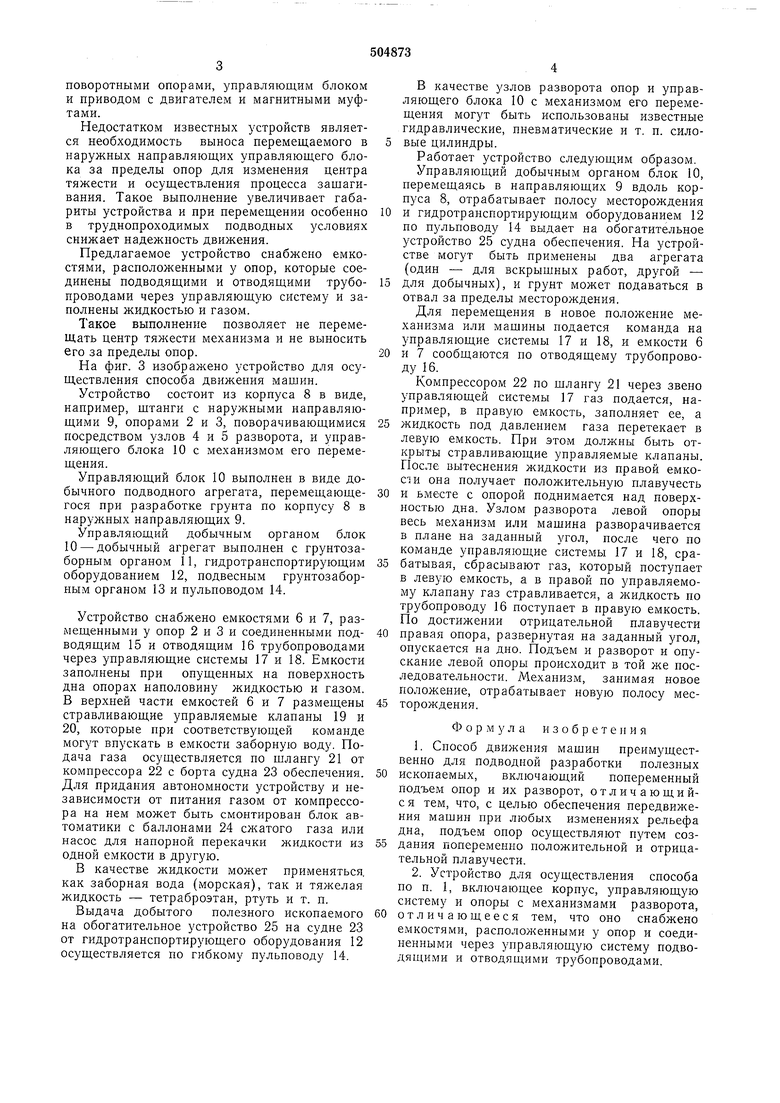
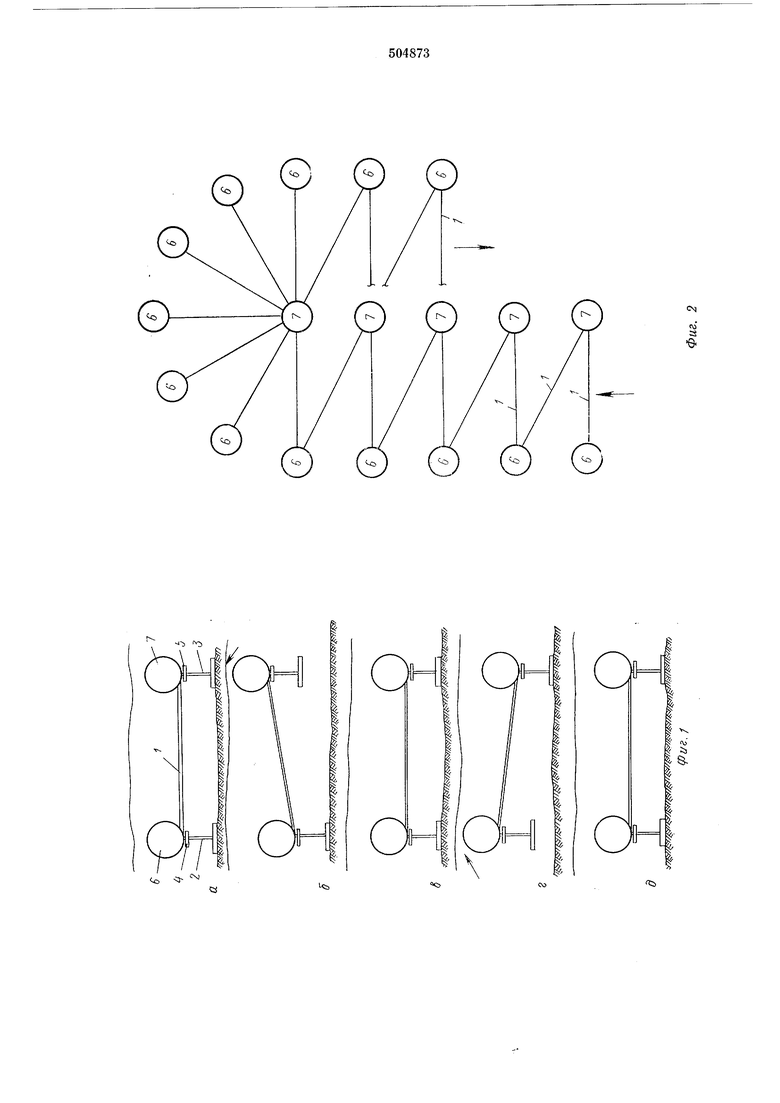
Для перемещения в новое положение механизма или машины подается команда на управляющие системы 17 и 18, и емкости б
и 7 сообщаются по отводящему трубопроводу 16.
Компрессором 22 по шлангу 21 через звено управляющей системы 17 газ подается, например, в правую емкость, заполняет ее, а
жидкость под давлением газа перетекает в левую емкость. При этом должны быть открыты стравливающие управляемые клапаны. После вытеснения жидкости из правой емкости она получает положительпую плавучесть
и вместе с опорой поднимается над поверхностью дна. Узлом разворота левой опоры весь механизм или машина разворачивается в плане на заданный угол, после чего по команде управляющие системы 17 и 18, срабатывая, сбрасывают газ, который поступает в левую емкость, а в правой по управляемощ клапану газ стравливается, а жидкость по трубопроводу 16 поступает в правую емкость. По достижении отрицательной плавучести
правая опора, развернутая на заданный угол, опускается на дно. Подъем и разворот и опускание левой опоры происходит в той же последовательности. Механизм, занимая новое положение, отрабатывает новую полосу месторождения.
Формула изобретения
1.Способ движения машин преимущественно для подводной разработки полезных
ископаемых, включающий попеременный подъем опор и их разворот, отличающийся тем, что, с целью обеспечения передвижения машин при любых изменениях рельефа дна, подъем онор осуществляют путем созДания попеременно положительной и отрицательной плавучести.
2.Устройство для осуществления способа по п. 1, включающее корпус, управляющую систему и опоры с механизмами разворота,
отличающееся тем, что оно снабжено емкостями, расположенными у опор и соединенными через управляющую систему подводящими и отводящими трубопроводами.
CN
со
a
e
| название | год | авторы | номер документа |
|---|---|---|---|
| Движитель шаговых перемещений | 1977 |
|
SU658030A1 |
| Движитель шаговых перемещений | 1978 |
|
SU765095A1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ РОССЫПЕЙ | 2004 |
|
RU2280165C1 |
| Устройство для разработки конкреций | 2002 |
|
RU2221144C1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 2012 |
|
RU2517288C1 |
| Устройство для подводной разработки полезных ископаемых | 1974 |
|
SU619655A1 |
| СПОСОБ ПОДЪЕМА ПОЛЕЗНОГО ИСКОПАЕМОГО ИЗ АГРЕГАТА ПОДВОДНОЙ ДОБЫЧИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184852C2 |
| Пневмогидравлический земснаряд | 1982 |
|
SU1062353A1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 2010 |
|
RU2459083C2 |
| СПОСОБ РАЗРАБОТКИ ПОДВОДНЫХ ГАЗОГИДРАТНЫХ ЗАЛЕЖЕЙ | 2013 |
|
RU2543389C1 |
Ui,
t) Фиг 3
