Изобретение относится к шаговым движителям и может быть использовано в подводных аппаратах для переме щения по дну информационных, добычных, траншеекопающих и дноуглублйющих средств. Известен движитель для подводных аппаратов, содержащий раму с опорными ведущими колесами и управляющую систему, получающую сигналы с плавучего транспортного средства l. Основным недостатком описанного движителя является низкая проходимость колес по дну ввиду его малой несущей способности и плохой- сцепляемости колес с опорным грунтом. Другой из известных движителей содержит шагающие опоры, совершающие плоско-параллельные перемещения по замкнутым траекториям с помощью гидроцилиндров, соединенных через распр делитель с источником высокого давления жидкости 2. Недостатком этого движителя является сложность кинематики и большое число двигающихся частей, требующих сложной и дорогостоящей защиты от попадания в них жидкости. Наиболее близким к данному изобр тению по технической сущности и дос тигаемому результату является движитель шаговых перемещений, содержащий горизонтально расположенный корпус, две поворотные ступицы с консольными опорными штангами и пустотелые поплавки, соединенные через распределитель с источником сжатого газа и жидкости, причем поворотные ступицы установлены по концам корпуса на вертикальных осях и снабжены мез анизмами их поворота, а пустотелые поплавки прикреплены по концам корпуса с возможностью их горизонтального перемещения посредством гидроцилиндров. При необходимости совершения шага один из пустотелых поплавков накачивают воздухом, после чего он приподнимает борт корпуса, в то же время включают механизм поворота ступицы другого борта, который поворачивает весь корпус на необходимый угол. Затем воздух в поплавке заменяют водой, после чего движитель снова устанавливается на опорных штангах обеих ступиц . Однако такой движитель имееют недостаточную устойчивость, особенно при наклонном дне и в момент поднятия опорных штанг одной из ступиц. При неблагоприятных рельефах дна
движитель .может потерять устойчивость и упасть на корпус, потеряв, при этом возможность дальнейшего передвижения.
Цель изобретения - повышение устойчивости и надежности работы.
Поставленная цель достигается тем, что в движителе шаговых пере- . мещений, содержащем горизонтально расположенный корпус, две поворотные ступицы с консольными опорными штангами и пустотелые поплавки, соединенные через распределитель с источником сжатого газа и жидкости/ поворотные ступицы установлены побортно на одной горизонтальной геометрической оси, а пустотелые поплавки прикреплены к свободным концам консольных опорных штанг.
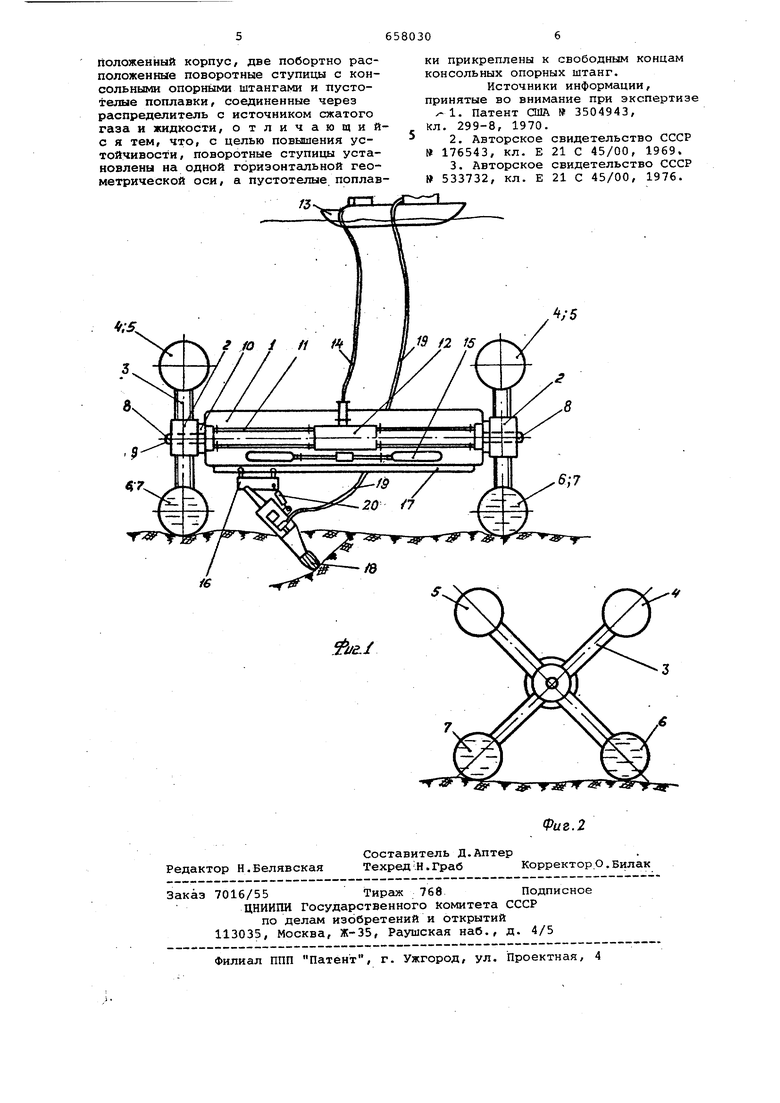
На фиг. 1 схематическое изображение устройства, вид спереди; на фиг. 2 - то же, вид сбоку.
Движитель шаговых перемещений состоит из горизонтально расположенного корпуса 1, по его бортам установлены поворотные ступицы 2 с жестко укрепленными на них консольнЕлми опорными штангами 3, к концам которых прикреплены пустотелые поплавки 4, 5, 6- и 7. Ступицы 2 установлены на одной горизонтальной геометрической оси 8 с возможностью свободного вращения шипов 9. Количество опорных штанг 3 - равное на обеих ступицах 2, они выполнены одинаковой длины и углы между соседними штангами одинаковы.
Пустотелые поплавки 4-7 посредством продольных отверстий в штангах 3 и распределителя 10 соединены трубопроводами 11 с источником 12 сжатого газа, например воздухом, и жидкости, например забортной водой, тетрабромэтаном, ртутью. Источник 12 сжатого газа и жидкости содержит управляющий блок (на чертеже не показан), который по заданной программ и сигналам с судна 13 обеспечения может за счет сжатого газа, подведенного к нему с судна 13 по трубопроводу 14, -перепускать жидкость из одних поплавков в другие по заданной программе. Для автономности движител на нем могут быть смонтированы баллоны 15 сжатого газа, или насос с двигателем и источником энергии на чертеже не показаны для напорной перекачки жидкости из одних поплав ков в другие.
На движителе может быть размещен информационный аппарат, добычный агрегат, траншеекопатель, дноуглублящий узел или др. В качестве примера исполнения показано размещение добычного агрегата.
Добычный агрегат содержит приводную тележку 16, установленную на горизонтальных направляющих 17, шаонирно установленный на тележке
16 грунтозаборный орган 18, связанный пульпопроводом 19 с судном 13, и гидроцилиндр 20.
При эксплуатации описанного устройства грунтозаборный орган 18 отрабатывает полосу дна качательными движениями, создаваемыми гидроцилиндром 20 и. поступательным перемещением тележки 16 по направляющим 17, и по пульпопроводу 19 транспортирует зернистый материал на обогатительную установку судна 13.
После отработки полосы, когда необходимо переместить устройство в новое положение, с судна 13 подают команду управляющему блоку источника 12 сжатого газа и жидкости, который при помощи сжатого газа, полученного из судна 13 по трубопроводу 14, или же из баллонов 15 перека ивает жидкость через трубопроводы 11 распределитель 10 и продольные отверстия опорных штанг 3 из одних пустотелых поплавков в другие. Возможно также эту перекачку осуществлять насосами (на чертеже они не показаны) .
Для поступательного движения перекачку осуществляют синхронно по обоим бортам, причем для движения, например направо, жидкость-из поплавков 4 и 5 перекачивают в поплавки б и 7, а для следующего шага из поплавков 4 и 7 в поплавки 5 и 6 и т.д.,при этом освобожденные от жидкости поплавки заполняют газом, от чего они получаю.т положительную плавучесть, создающую крутящий момент. Во время каждого полушага, когда (например, в первом шаге) поплавок 5 достигает наивысшей точки своей траектории, его снова заполняют жидкостью, которая увеличивает крутящий момент, действующий на всю поворотную систему.
При необходимости поворота жидкость перекачивается лишь в поплавках одного борта, а при необходимости разворота жидкость перекачивают в поплавках обои;с бортов, но в противоположном порядке.
Применение данного изобретения обеспечивает значительную устойчивость движителя в условиях наклонного рельефа дна водоемов, повышенную проходимость, высокую маневренность, легкую управляемость и высокую надежность работы. Оно может быть .с успехом использовано для добычи твердых полезных ископаекйх из глубоководных залежей, при этом буду сокращены металлоемкость, потребляемая энергия, расход воздуха и стоимость создания подводного аппарата и его эксплуатация.
Формула изобретения
Движитель шаговых перемещений, преимущественно Щ1Я подводных аппаратов, содержащий горизонтально рас
| название | год | авторы | номер документа |
|---|---|---|---|
| Движитель шаговых перемещений | 1978 |
|
SU765095A1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| ПОДВОДНЫЙ ДОБЫВАЮЩИЙ АППАРАТ И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2371580C1 |
| Способ движения машин,преимущественной для подводной разработки полезных ископаемых и устройство для его осуществления | 1974 |
|
SU504873A1 |
| СУДОПОДЪЕМНИК-СПАСАТЕЛЬ | 2003 |
|
RU2261819C2 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО | 2012 |
|
RU2517288C1 |
| ВОЛНОХОД | 1995 |
|
RU2089433C1 |
| Плавучая платформа, совмещенная с малыми судами на сжатом пневмопотоке | 2021 |
|
RU2835223C2 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО БУРЕНИЯ | 2002 |
|
RU2230874C1 |
| ЭКРАНОПЛАН ТИПА "ЛЕТАЮЩЕЕ КРЫЛО" | 1992 |
|
RU2081014C1 |
