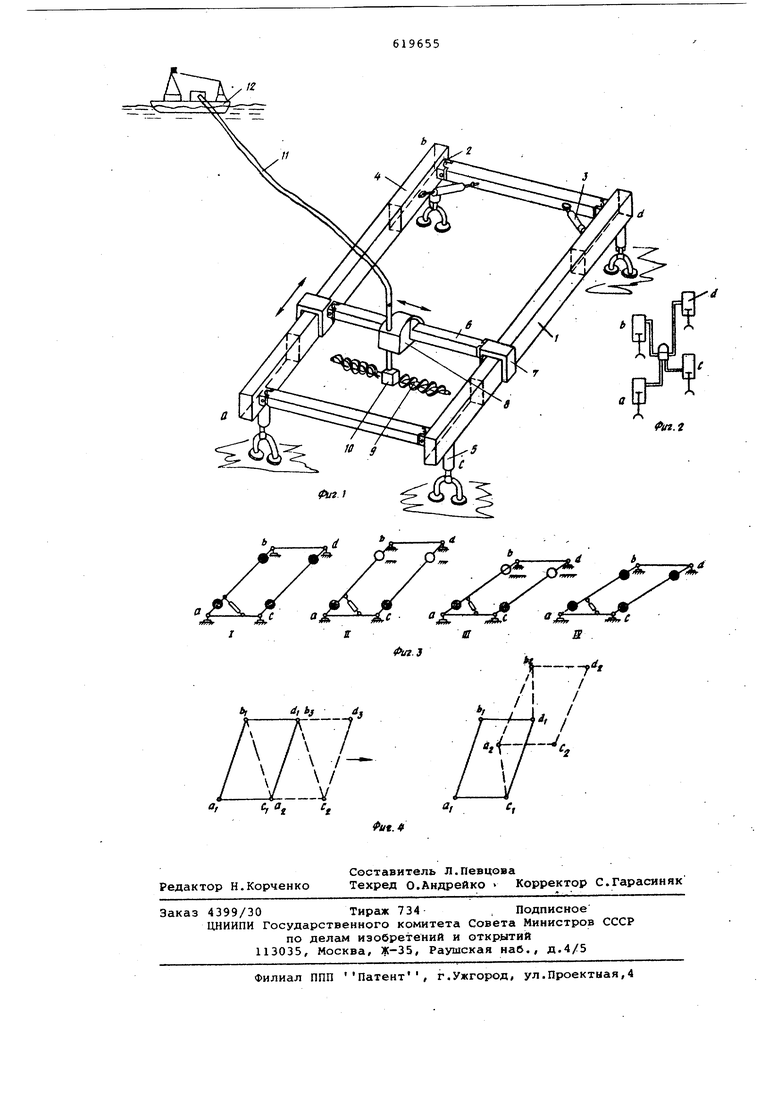
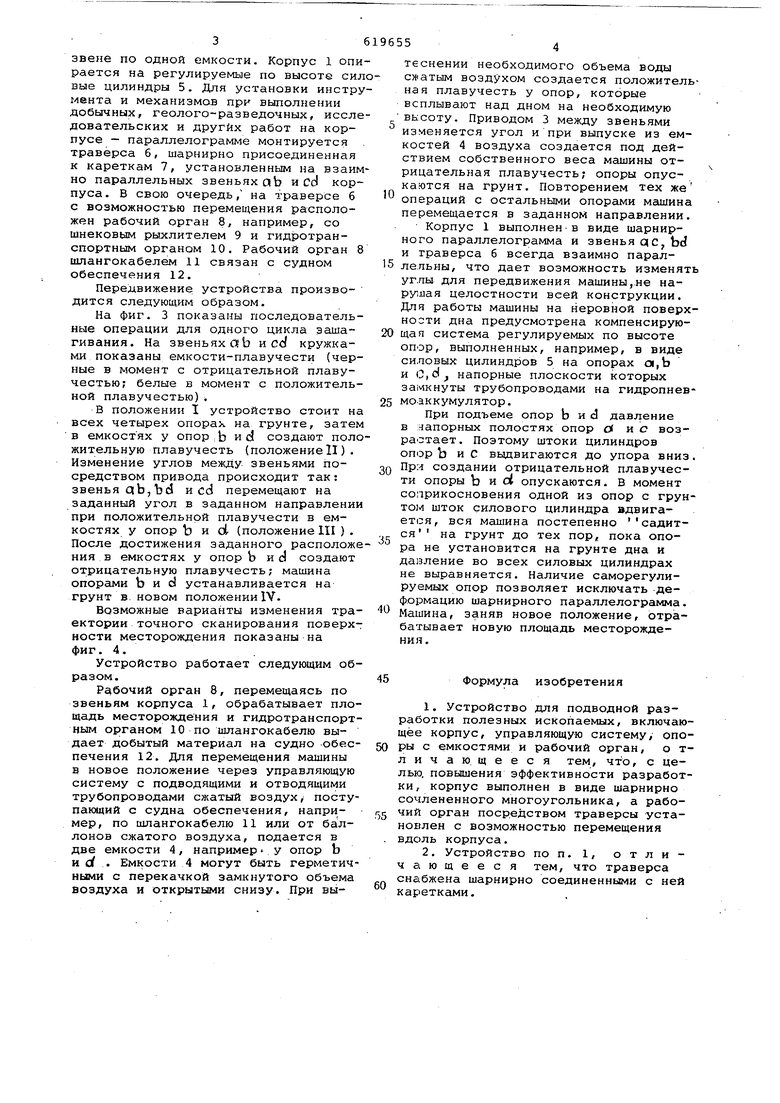
эвене по одной емкости. Корпус 1 опи рается на регулируемые по высоте сил вые цилиндры 5. Для установки инстру мента и механизмов при выполнении добычных, геолого-разведочных, иссле довательских и других работ на корпусе - параллелограмме монтируется траверса 6, шарнирно присоединенная к кареткам 7, установленным на взаим но параллельных звеньяхаЬ и cd корпуса. В свою очередь/ на траверсе 6 с возможностью перемещения расположен рабочий орган 8, например, со шнековым рыхлителем 9 и гидротранспортным органом 10. Рабочий орган 8 шлангокабелем 11 связан с судном обеспечения 12. Передвижение: устройства производится следующим образом. На фиг. 3 показаны последовательные операции для одного цикла эашагивания. На звеньях аЬ и ее/ кружками показаны емкости-плавучести (черные в момент с отрицательной плавучестью; белые в момент с положительной плавучестью) -, В положении I устройство стоит на всех четырех опорах на грунте, затем в емкостях у onopib Hd создают пол жительную плавучесть (положение), Изменение углов между звеньями посредством привода происходит так: звенья C|b,bdi и cd перемещают на заданный угол в заданном направлени при положительной плавучести в емкостях у опор b и о1 (положение III ) . После достижения заданного располож ния в емкостях у опор b и d создают отрицательную плавучесть; машина опорами b и d устанавливается на грунт в новом положении IV. Возможные варианты изменения тра
ектории точного сканирования поверхности месторождения показаны на фиг. 4..
Устройство работает следующим образом.
Рабочий орган 8, перемещаясь по звеньям корпуса 1, обрабатывает площадь месторождения и гидротранспортным органом 10 по шлангокабелю выдает добытый материал на судно обеспечения 12. Для перемещения машины в новое положение через управляющую систему с подводящими и отводящими трубопроводами сжатый воздух, поступающий с судна обеспечения, например, по шлангокабелю 11 или от баллонов сжатого воздуха, подается в две емкости 4, например у опор b и с/ . Емкости 4 могут быть герметичными с перекачкой замкнутого объема воздуха и открытыми снизу. При выбатывает новую площадь месторождения.
Формула изобретения
1.Устройство для подводной разработки полезных ископаемых, включающее корпус, управляющую систему, опоры с емкостями и рабочий орган, о тличаю. щееся тем, что, с целью, повышения эффективности разработки , корпус выполнен в виде шарнирно сочлененного многоугольника, а рабочий орган посредством траверсы установлен с возможностью перемещения вдоль корпуса.
2.Устройство по п. 1, отлиЧс1ющееся тем, что траверса снабжена шарнирно соединенными с ней каретками. теснении необходимого объема воды сжатым воздухом создается положительная плавучесть у опор, которые всплывают над дном на необходимую внсоту. Приводом 3 между звеньями изменяется угол и при выпуске из емкостей 4 воздуха создается под действием собственного веса машины отрицательная плавучесть; опоры опускаются на грунт. Повторением тех же операций с остальными опорами МсШ1ина перемещается в заданном направлении. Корпус 1 выполнен-в виде шарнирного параллелограмма и звенья qc bd и траверса 6 всегда взаимно параллельны, что дает возможность изменять углы для передвижения машины,не нарушая целостности всей конструкции. Для работы машины на неровной поверхности дна предусмотрена компенсирующая система регулируемых по высоте опор, выполненных, например, в виде силовых цилиндров 5 на опорах oi,b и C,dj напорные плоскости которых за1чкнуты трубопроводами на гидропневмоаккумулятор. При подъеме опор b и d давление в аапорных полостях опор о и С возрастает. Поэтому штоки цилиндров опор b и С выдвигаются до упора вниз. При создании отрицательной плавучести опоры b и о1 опускаются. В момент соприкосновения одной из опор с грунтом шток силового цилиндра вдвигает1;я, вся машина постепенно садится на грунт до тех пор, пока опора не установится на грунте дна и давление во всех силовых цилиндрах не выравняется. Наличие саморегулируемых опор позволяет исключать деформацию шарнирного параллелограмма. Машина, заняв новое положение, отра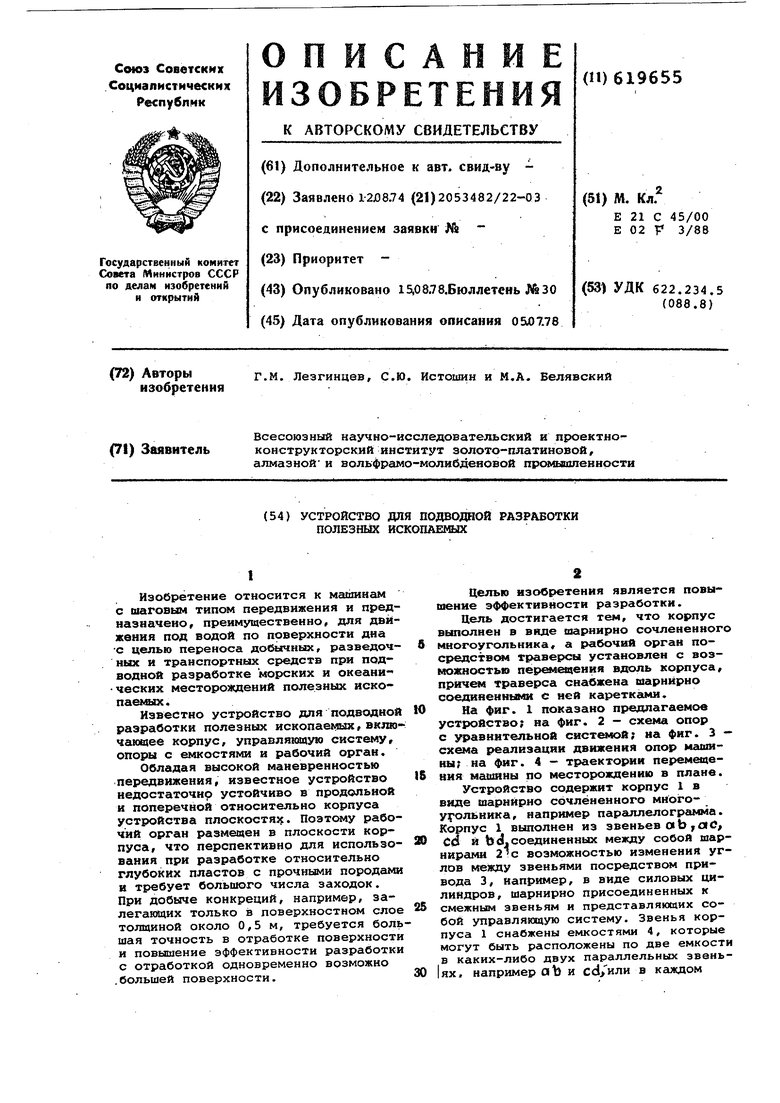
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| СПОСОБ ПРОИЗВОДСТВА ЗЕМЛЕРОЙНО-УКЛАДОЧНЫХ РАБОТ ПРИ ПРОКЛАДКЕ ПОДВОДНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2507431C2 |
| Способ движения машин,преимущественной для подводной разработки полезных ископаемых и устройство для его осуществления | 1974 |
|
SU504873A1 |
| Устройство для добычи полезныхиСКОпАЕМыХ | 1976 |
|
SU842197A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| СПОСОБ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ ИЗ ИЛИСТЫХ ДОННЫХ ОТЛОЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562304C1 |
| Движитель шаговых перемещений | 1978 |
|
SU765095A1 |
| ГЛУБОКОВОДНАЯ РАЗЪЕМНАЯ ТУРЕЛЬНАЯ СИСТЕМА С ПОЛОГОВОЛНОВОЙ КОНФИГУРАЦИЕЙ ЖЕСТКОГО РАЙЗЕРА | 2014 |
|
RU2657598C2 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ АППАРАТ И СПОСОБ ЕГО ПЕРЕДВИЖЕНИЯ | 2008 |
|
RU2385254C1 |
| Устройство для забивки стержней в грунт преимущественно под водой | 1978 |
|
SU734343A1 |