1
Изобретение относится к шагающим движителям и может быть использовано в подводных аппаратах для перемещения по дну информационных, добычных, траншеекопающих и дноуглубляющих аппаратов и механизмов.
Известен движитель шаговых перемещений, содержащий горизонтальный корпус с двумя вертикальными поворотными ступицами на его концах, имеющими консольные опорные штанги, и установленные на корпусе пустотелые поплавки, соединенные посредством распределителя с источником сжатого газа и Жидкости, причем поворотные ступицы снабжены индивидуальными приводами поворота. При необходимости совершения шага один из пустотелых поплавков накачивают воздухом, после чего он приподнимает один борт корпуса, отрывая опорные штанги от грунта, и в то же время включают механизм поворота ступицы другого борта, который весь корпус поворачивает на необходимый угол. Затем воздух в поплавке заменяют водой, после чего движитель снова устанавливают на опорные штанги обеих ступиц 1
Недостатком данного движителя является малая поперечная устойчивость, особенно при наклонном дне и в момент поднятия опорных штанг одной из ступиц. При неблагоприятных рельефах дна этот движитель 5 может потерять устойчивость и упасть на корпус.
Наиболее близким к изобретению по технической сущности и достигаемому результату является движитель шаговых переме 0 щений, содержащий горизонтальный корпус с двумя поворотно расположенными ступицами, имеющими радиальные штанги, на концах которых установлены пустотелые поплавки, соединенные посредством размещен j ных в корпусе распределителей с источником сжатого воздуха и жидкости, причем каждый из пустотелых поплавков жестко присоединен к радиальной щтанге 2.
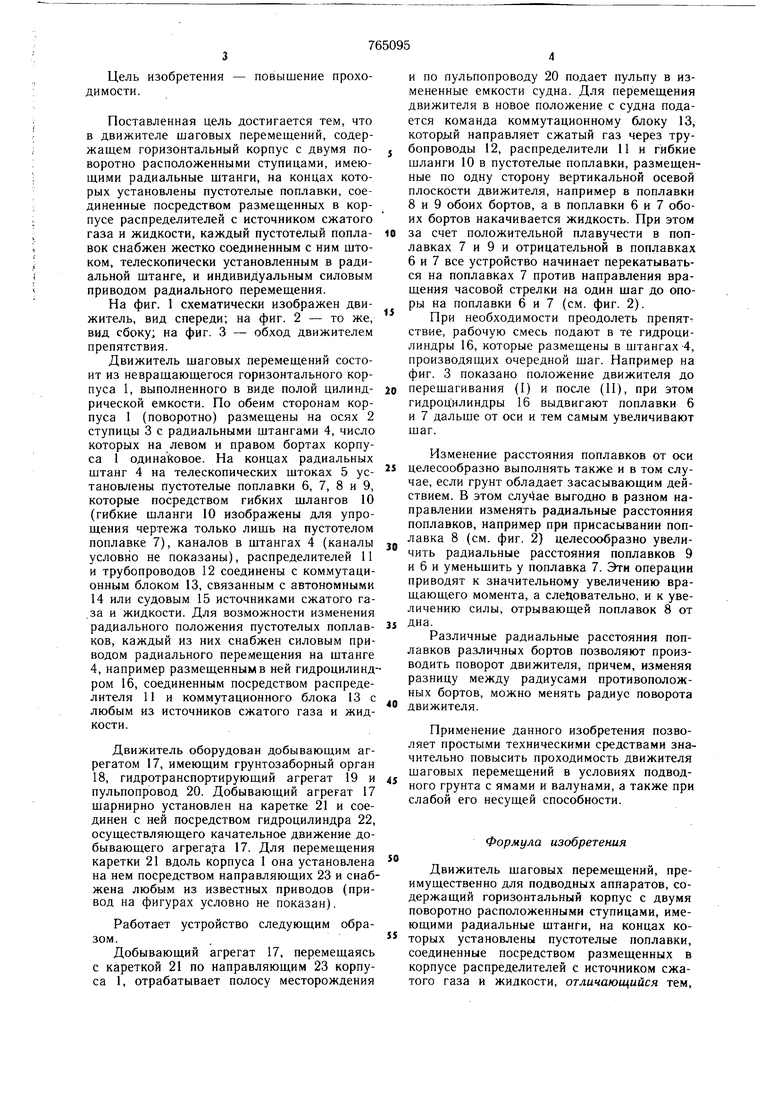
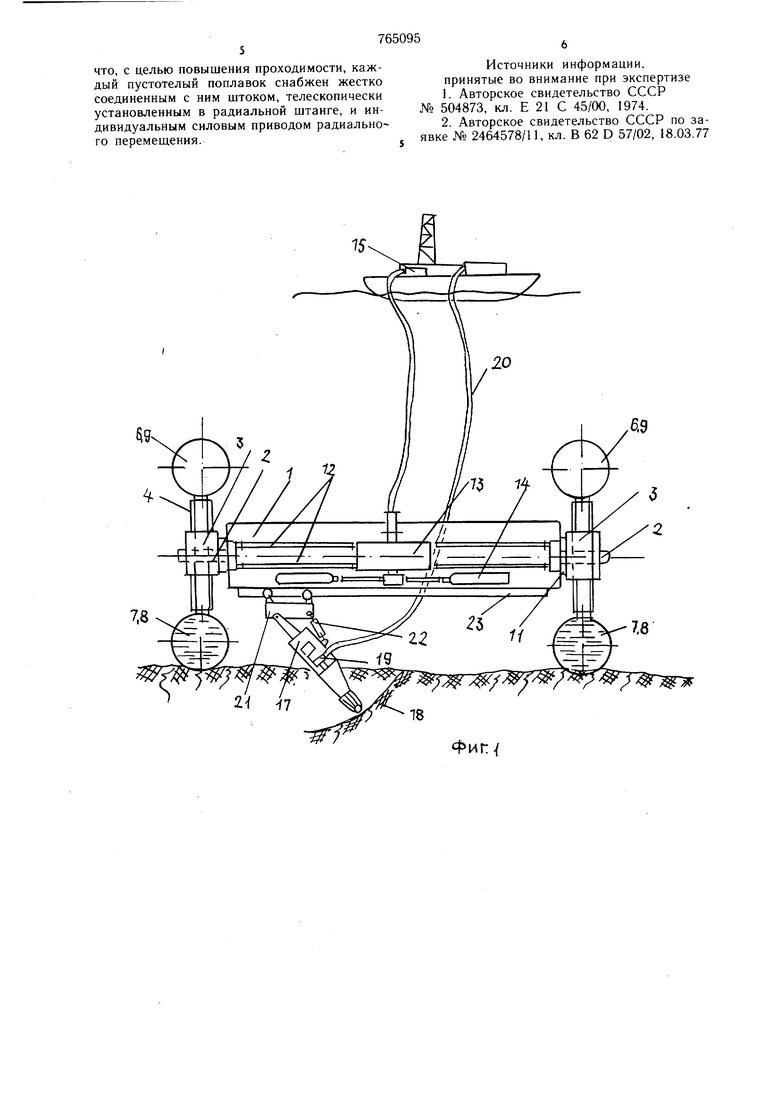
Недостатком такого движителя является 20 невозможность изменения длины щага, что приводит к пониженной проходимости на дне с препятствиями типа валунов или ям, а также на слабонесущих грунтах, имеющих способность засасывать опорные поплавки. Цель изобретения - повышение проходимости. Поставленная цель достигается тем, что в движителе шаговых перемеш,ений, содержащем горизонтальный корпус с двумя поворотно расположенными ступицами, имеющими радиальные щтанги, на концах которых установлены пустотелые поплавки, соединенные посредством размещенных в корпусе распределителей с источником сжатого газа и жидкости, каждый пустотелый поплавок снабжен жестко соединенным с ним щтоком, телескопически установленным в радиальной щтанге, и индивидуальным силовым приводом радиального перемещения. На фиг. 1 схематически изображен движитель, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - обход движителем препятствия. Движитель щаговых перемещений состоит из невращающегося горизонтального корпуса 1, выполненного в виде полой цилиндрической емкости. По обеим сторонам корпуса 1 (поворотно) размещены на осях 2 ступицы 3 с радиальными щтангами 4, число которых на левом и правом бортах корпуса 1 одинаковое. На концах радиальных штанг 4 на телескопических щтоках 5 установлены пустотелые поплавки 6, 7, 8 и 9, которые посредством гибких шлангов 10 (гибкие шланги 10 изображены для упрощения чертежа только лишь на пустотелом поплавке 7), каналов в щтангах 4 (каналы условно не показаны), распределителей 11 и трубопроводов 12 соединены с коммутационным блоком 13, связанным с автономными 14 или судовым 15 источниками сжатого га.за и жидкости. Для возможности изменения радиального положения пустотелых поплавков, каждый из них снабжен силовым приводом радиального перемещения на щтанге 4, например размещенным в ней гидроцилиндром 16, соединенным посредством распределителя 11 и коммутационного блока 13 с любым из источников сжатого газа и жидкости. Движитель оборудован добывающим агрегатом 17, имеющим грунтозаборный орган 18, гидротранспортирующий агрегат 19 и пульпопровод 20. Добывающий агрегат 17 щарнирно установлен на каретке 21 и соединен с ней посредством гидроцилиндра 22, осуществляющего качательное движение добывающего агрега,та 17. Для перемещения каретки 21 вдоль корпуса 1 она установлена на нем посредством направляющих 23 и снаб жена любым из известных приводов (привод на фигурах условно не показан). Работает устройство следующим образом. Добывающий агрегат 17, перемещаясь с кареткой 21 по направляющим 23 корпуса 1, отрабатывает полосу месторождения И по пульпопроводу 20 подает пульпу в измененные емкости судна. Для перемещения движителя в новое положение с судна подается команда коммутационному блоку 13, который направляет сжатый газ через трубопроводы 12, распределители 11 и гибкие шланги 10 в пустотелые поплавки, размещенные по одну сторону вертикальной осевой плоскости движителя, например в поплавки 8 и 9 обоих бортов, а в поплавки 6 и 7 обоих бортов накачивается жидкость. При этом за счет положительной плавучести в поплавках 7 и 9 и отрицательной в поплавках 6 и 7 все устройство начинает перекатываться на поплавках 7 против направления вращения часовой стрелки на один щаг до опоры на поплавки 6 и 7 (см. фиг. 2). При необходимости преодолеть препят ствие, рабочую смесь подают в те гидроцилиндры 16, которые размещены в щтангах-4, производящих очередной шаг. Например на фиг. 3 показано положение движителя до перешагивания (I) и после (И), при этом гидроцилиндры 16 выдвигают поплавки 6 и 7 дальше от оси и тем самым увеличивают шаг. Изменение расстояния поплавков от оси целесообразно выполнять также и в том случае, если грунт обладает засасывающим действием. В этом случае выгодно в разном направлении изменять радиальные расстояния поплавков, например при присасывании поплавка 8 (см. фиг. 2) целесообразно увеличить радиальные расстояния поплавков 9 и 6 и уменьшить у поплавка 7. Эти операции приводят к значительному увеличению вращающего момента, а следовательно, и к увеличению силы, отрывающей поплавок 8 от дна. Различные радиальные расстояния поплавков различных бортов позволяют производить поворот движителя, причем, изменяя разницу между радиусами противоположных бортов, можно менять радиус поворота движителя. Применение данного изобретения позволяет простыми техническими средствами значительно повысить проходимость движителя шаговых перемещений в условиях подводного грунта с ямами и валунами, а также при слабой его несущей способности. Формула изобретения Движитель щаговых перемещений, преимущественно для подводных аппаратов, содержащий горизонтальный корпус с двумя поворотно расположенными ступицами, имеющими радиальные штанги, на концах которых установлены пустотелые поплавки, соединенные посредством размещенных в корпусе распределителей с источником сжатого газа и жидкости, отличающийся тем.
что, с целью повышения проходимости, каждый пустотелый поплавок снабжен жестко соединенным с ним штоком, телескопически установленным в радиальной штанге, и индивидуальным снловым приводом радиального перемещения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 504873, кл. Е 21 С 45/00, 1974.
2 Авторское свидетельство СССР по заявке № 2464578/11, кл. В 62 D 57/02, 18.03.77
| название | год | авторы | номер документа |
|---|---|---|---|
| Движитель шаговых перемещений | 1977 |
|
SU658030A1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| Пробоотборник | 1985 |
|
SU1293318A1 |
| АМФИБИЯ-ТРАНСФОРМЕР "АКВА" | 2010 |
|
RU2448844C1 |
| ПОДВОДНЫЙ ДОБЫВАЮЩИЙ АППАРАТ И СПОСОБ ЕГО РАБОТЫ | 2008 |
|
RU2371580C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| Колесо транспортного средства | 1981 |
|
SU992242A1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1987 |
|
RU2031039C1 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2004 |
|
RU2279371C2 |
| ВОЛНОХОД | 1995 |
|
RU2089433C1 |
Фиг:
