1
Изобретение относится к технике уборки кормовых культур, в частности к полевым измельчителям-погрузчикам,погружающим измельченный стебельчатый корм в прицеп, конкретно к устройствам для поворота выгрузной трубы в зависимости от взаимоположения измельчителя-погрузчика и прицепа в плоскости передвижения.
Известно устройство, в котором дышло прицепа п рычаг ручного управления связаны между собой и с выгрузной трубой измельчителя-погрузчика рычажно-кулисным механизмом.
Однако это устройство обладает рядом существенных недостатков, заключающихся в том, что выгрузная труба непрерывно копирует все колебания дыщла прицепа в плоскости передвижения, в том числе и не вызывающие проброса корма мимо кузова, что ускоряет износ механизма поворота, жесткая взаимосвязь прицепа и выгрузной трубы препятствует самораспределению погружаемого корма внутри кузова.
Сложность конструкции затрудняет и делает дорогим его изготовление, снижает износостойкость и эксплуатационную надежность.
Целью изобретения является устранение указанных недостатков, повыщение эксплуатационной надежности, автоматическое управление выгрузной трубой при повороте прицепа относительно кузова.
Сущность изобретения заключается в том, что исполнительный механизм выполнен в
виде рычага, перемещающегося в горизонтальной плоскости, один конец которого размещен между двумя регулируемыми и закрепленными на дышле прицепа упорами, а другой кинематически связан через золотник
гидрораспределителя и упругое звено, корпуса которых соединены между собой, с выгрузной трубой и гидрюцилиндром поворота ее. Кроме того, рукоятка ручного управления выполнена в виде рычага с фиксатором положения и соединена через упругое звено с качающимся рычагом.
Расстояние между упорами дыщла прицепа, а leM самым и ход качающегося рычага при повороте выгрузной трубы предварительно подбирается таким, чтобы в крайних положениях последнего выгрузная труба находилась в крайних допустимых положениях относительно прицепа, при которых измельченный корм еще полностью поступает в кузов.
Автоматический поворот выгрузной трубы осуществляется только при таком положении прицепа на повороте, когда один из упоров касается качающегося рычага и начинает его перемещать. При этом выгрузная труба относительно кузова прицепа выдерживает соответствующее крайнее положение, а рычаг ручного управления (благодаря его упругой связи с качающимся рычагом и наличием фиксирующей защелки) остается в заданном мащинистом положении. Взаимоподвижные элементы в упругом звене цепи ручного управления, перемещаясь, сжимают (или растягивают) пружину, которая при возвращении дышла в исходное положение возвращает качающийся рычаг, а вместе с ним и выгрузную трубу в положение, заданное мащинистом, предшествовавшее повороту уборочного регата. Соответственно перемещением рычага ручного управления машинист в состоянии поворачивать выгрузную трубу только в пределах хода между упорами качающегося рычага. При дальнейшем перемещении рычага ручного управления унругое звено пропорционально с кимается (или растягивается), а выгрузная труба и качающийся рычаг, удерживаемый одним из упоров, остаются неподвижными.
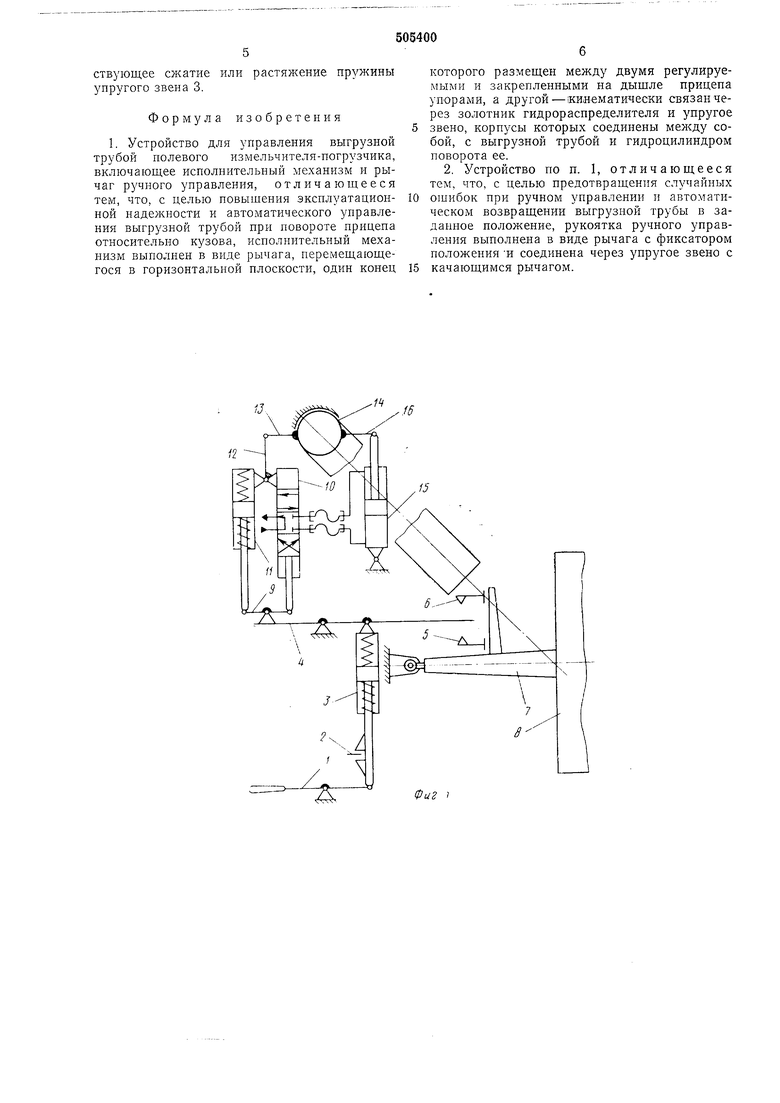
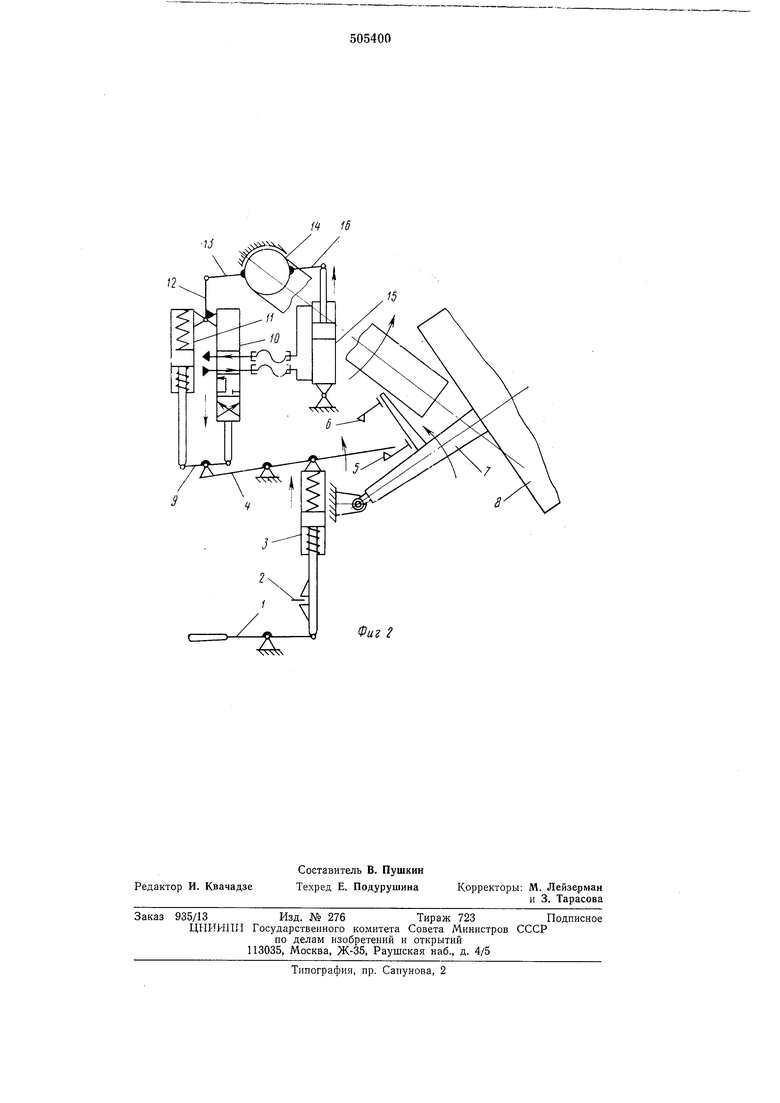
На фиг. 1 показано предложенное устройство в статическом нейтральном ноложении; на фиг. 2 - то же, в действии при автоматическом вращении выгрузной трубы на повороте уборочного агрегата.
Устройство для управления выгрузной трубой полевого измельчителя-погрузчика содержит рукоятку ручного управления 1 в виде рычага с фиксирующей двусторонней защелкой 2, устанавливаемого на измельчителе-погрузчике и соединенного щарнирно посредством уп ругого звена 3 (например, -ъ виде ползуна, подпружиненного в направляющем корпусе) с качающимся в горизонтальной плоскости рычагом 4, одип конец которого размещен между упорами 5 и 6, установленными иа поперечине дыщла 7 прицепа 8, а другой - шарнирно соединен с дифференциальным рычагом 9, кинематически связывающим золотник четырехлинейного трехпозиционного гидрораспределителя 10 с упругим звеном 11, корпусы которых соединены между собой и тягой 12 подсоединены шарнирно к тяге 13, жестко прикрепленной к поворотной части выгрузной трубы 14 погрузчика, гидроцилиндра 15, осуществляющего через рычаг 16 поворот трубы 14. Тяга 12 и гидроцилиндр 15 могут быть присоединены к трубе 14 непосредственно.
Устройство работает следующим образом. Пока качающийся рычаг 4 не касается ни одного из упоров 5 и 6 угол поворота выгрузной трубы 14 соответствует заданному и зафиксированному защелкой 2 положению рычага ручного управления 1. Неподвижное положение выгрузной трубы 14 фиксируется золотником гидрораспределителя 10, который при равновесных состояниях пружин упругих звеньев 3 и 11 находится в нейтральном (среднем) положении и запирает полости гидроцилиндра 15 (фиг. 1).
На правом повороте уборочного агрегата дыщло 7 прицепа 8 перемещается в сторону
поворота, поэтому упор 6 приближается к качающемуся рычагу 4. В момент достижения крайнего допустимого положения выгрузной трубы 14 относительно кузова прицепа 8 упор 5 соприкасается с качающимся рычагом 4, начинает его перемещать в сторону поворота дыщла и через дифференциальный рычаг 9 смещает золотник гидрораспределителя 10 в положение, пронускающее рабочую
жидкость в гидроцилиндр 15, поворачивая выгрузную трубу 14 в сторону перемещения прицепа 8 (фиг. 2). Благодаря жесткой обратной связи, при повороте выгрузной трубы 14 корпус гидрораспределителя 10 перемещается в том же паправлении, как и золотник, стремясь таким образом восстановить нейтральное положение последиего. В итоге выгрузная труба 14 поворачивается пропорционально перемещению качающегося рычага 4,
т. е. углу поворота дышла прицепа, оставаясь при этом в крайнем допустимом положении относительно кузова прицепа 8.
Упругое звено 11, подпружиненный подвижный порщень которого через дифференциальный, рычаг 9 смещается относительцо корпуса в зависимости от разницы между угловыми скоростями вращения качающегося рычага и выгрузной трубы, корректирует перемещение золотника по времени, а поэтому
и скорость вращения выгрузной трубы.
Как только поворот дышла прекращается, пружины упругого звена 11 уравновешиваются, золотник гидрораспределителя 10 занимает нейтральное положение и вращение выгрузной трубы прекращается. Качающийся рычаг 4 остается прижатым к упору 5 силой сжатия (или растяжения) пружины упругого звена 3, так как при автоматическом повороте выгрузной трубы 14 рычаг ручного управления 1 неподвижпо удерживается. защелкой 2. На выходе из поворота, когда дышло перемещается в обратном направлении, эта сила удерживает качающийся рычаг 4 на упоре 5 и выгрузная труба 14 перемещается тоже в обратном направлении пропорционально перемещению дышла 7 прицепа 8.
Обратное вращение выгрузной трубы продолжается до тех пор, пока взаимоподвижные элементы упругого звена 3 не возвращаются в
исходное уравновещенное полол :ение, что соответствует положению выгрузной трубы перед поворотом агрегата.
При повороте агрегата в противоположную сторону качающийся рычаг 4 перемещается
упором 6.
Как па повороте уборочного агрегата, так и при его прямолинейном движении, выгрузную трубу можно поворачивать рычагом ручного
управления, но только в пределах перемещеРП1Я качающегося рычага 4 между упорами 5 и 6. При соприкосновении последнего с одним из упоров вращение выгрузной трубы 14 прекращается: дальнейшее перемещение рычага
ручного управления вызывает только соответствующее сжатие или растяжение пружины упругого звепа 3.
Формула изобретения
1. Устройство для управления выгрузной трубой полевого измельчителя-погрузчика, включающее исполнительный механизм и рычаг ручного управления, отличающееся тем, что, с целью повышения эксплуатационной надежности и автоматического унравления выгрузной трубой при повороте прицепа относительно кузова, исполнительный механизм выполнен в виде рычага, перемещающегося в горизонтальной плоскости, один конец
которого размещен между двумя регулируемыми и закрепленными на дыщле прицепа упорами, а другой-кинематически связан через золотник гидрораснределителя и упругое
звено, корпусы которых соединены собой, с выгрузной трубой и гидроцилиндром поворота ее.
2. Устройство по п. 1, отличающееся тем, что, с целью предотвращения случайных
ошибок при ручном управлении и автоматическом возвращении выгрузной трубы в заданное положение, рукоятка ручного управления выполнена в виде рычага с фиксатором положения И соединена через упругое звено с
качающимся рычагом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ КОЛЕСАМИ МНОГООСНОГО | 1973 |
|
SU388938A1 |
| ТРЕХОСНЫЙ ПРИЦЕП | 2017 |
|
RU2674398C1 |
| ПОГРУЗЧИК-ТРАНСПОРТИРОВЩИК РУЛОНОВ СЕНОСОЛОМИСТЫХ МАТЕРИАЛОВ | 2015 |
|
RU2580163C1 |
| АВТОПОЕЗД | 2004 |
|
RU2264943C1 |
| СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 1994 |
|
RU2094282C1 |
| Устройство для управления колесами прицепа | 1988 |
|
SU1505830A1 |
| КОМБИНИРОВАННЫЙ АГРЕГАТ ДЛЯ ОБЛЕСЕНИЯ КРУТЫХ ЗАДЕРНОВАННЫХ СКЛОНОВ ОВРАГОВ И БАЛОК | 2007 |
|
RU2389177C2 |
| ОДНООСНЫЙ САМОСВАЛЬНЫЙ ПРИЦЕП | 1972 |
|
SU421562A1 |
| Погрузчик-транспортировщик сеносоломистых материалов | 1990 |
|
SU1748719A1 |
f6
Фиг
и
-
4W4
Фиг г
