1
Изобретение относится к медицинской технике, а именно к протезированию.
Известен привод протеза при вычленении плеча, содержащий тяговые механизмы плеча и локтя, дистальное звено с кистью, пружинный разгрузочный механизм с электроприводом регулирования, выполненным в виде передачи винт - гайка, а также блок микропереключателей 1.
Однако известный привод не устраняет компенсаторных движений при управлении и не обеспечивает автоматической саморазгрузр;и привода при захвате кистью предметов.
Цель изобретения - устранить компенсаторные движения при управлении и обеспечить автоматическую саморазгрузку привода при захвате кистью предметов.
Это достигается тем, что механизмы плеча и локтя выполнены в виде электродвигателей с редукторами, на выходе электродвигателя механизма плеча установлены дифференциал и электромагнитная муфта, выходные шестерни дифференциала кинематически связаны с редуктором механизма плеча, передачей винт - гайка разгрузочного механизма и электромагнитной муфтой, а в пальцах кисти закреплен пороговый чувствительный элемент, например тензодатчик, электрически связанный с электродвигателем механизма плеча и электромагнитной муфтой.
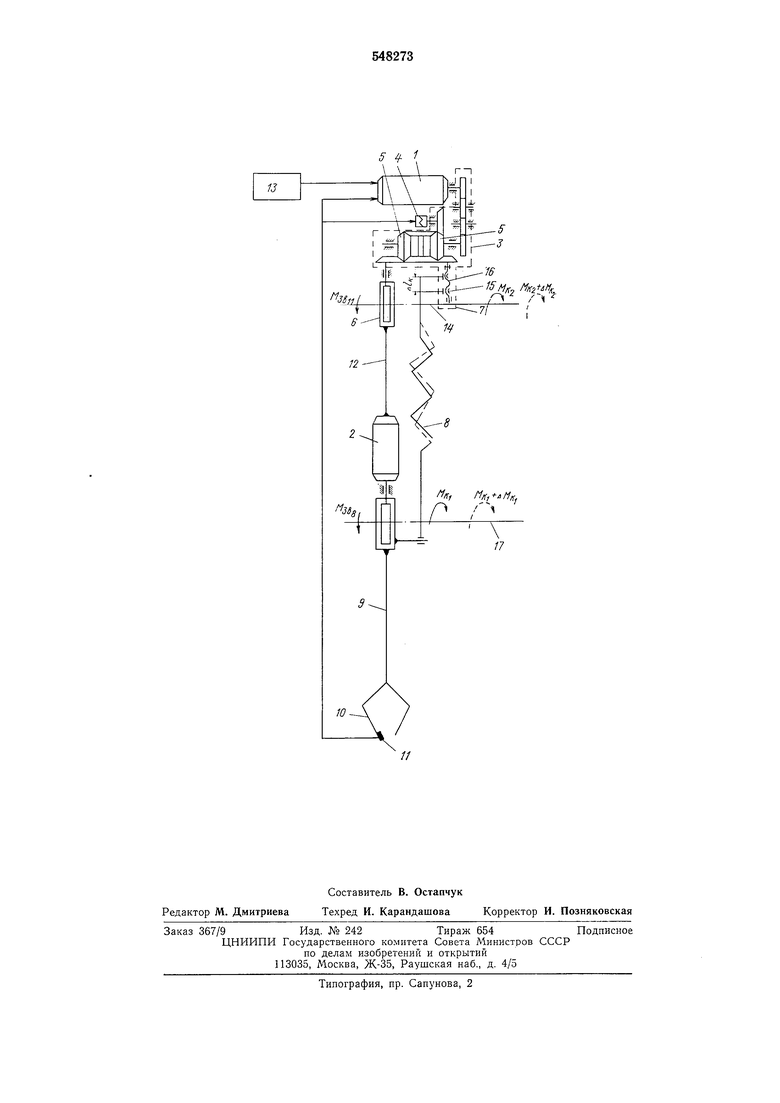
На чертеже приведена принципиальная схема привода протеза при вычленении плеча. Привод протеза содержит механизмы плеча и локтя, выполненные в виде электродвигателей 1 и 2 с соответствующими редукторами (показаны схематично), причем на выходе электродвигателя 1 механизма плеча установлены дифференциал 3 и электромагнитная муфта 4, а выходные шестерни 5 дифференциала 3 связаны с редуктором механизма плеча 6, передачей 7 винт - гайка разгрузочного механизма 8 и электромагнитной муфтой 4, дистальное звено 9 с кистью 10, в пальцах которой закреплен пороговый ч вствительный
элемент 11, например тензодатчик, электрически связанный с электродвигателем 1 механизма плеча и электромагнитной муфтой 4. Устройство работает следующим образом. При манипулировании с предметом, вес которого меньше порогового, сигнал с порогового чувствительного элемента 11 равен нулю и сопротивление цепи Мдв -Мк, (где Мдв, - момент, создаваемый электродвигателем 1, и Мк,-компенсирующий момент, создаваемый
разгрузочным механизмом 8) велико из-за того, что разгрузочный элемент настраивается иа компенсацию веса плеча 12. Поэтому момент электродвигателя I, за счет свойств дифференциала 3 и наличия нормально замкнутой электромагнитной муфты 4 распределиется по цепи Мдв, - Мзв„ что вызывает движение плеча 12 на основании сигнала, поданного оператором на датчик 13 управляющих воздействий, следовательно, на электродвигатель 1.
При захвате предмета, вес которого больше порогового (а это значит, что сопротивление цепи Мдв1 -М.зв„ больше, чем Мдв -MnJ. сигнал с порогового чувствительного элемента 11 вводится на электродвигатель 1 и нормально замкнутую электромагнитную муфту 4. Срабатывание нормально замкнутой электромагнитной муфты 4 приводит к расфиксации выходной шестерни 5 дифференциала 3, и момент, создаваемый электродвигателем 1, распределяется по цепи создавая дополнительный компенсирующий момент ДМ Кг относительно оси вращения 14 в результате деформации разгрузочного механизма 8 на величину А/, функционально связанную с весом захваченного предмета, за счет перемещения гайки 15 по винту 16. После заверщения процесса регулирования силы схвата сигнал с порогового чувствительного элемента 11 становится равен нулю, нормально замкнутая муфта вновь фиксирует подвижность выходной шестерни 5 дифференциала - происходит «запоминание приращения компенсирующего момента, т. е. осуществляется саморазгрузка электродвигателя 1. Такое состояние сохраняется в процессе манипулирования предметом, осуществляемое в результате формирования команд оператора с датчика 13 управляющих воздействий на электродвигатель 1. Одновременно с разгрузкой электродвигателя 1 осуществляется разгрузка электродвигателя 2 локтевого механизма, поскольку дополнительное растяжение на величину Ai разгрузочного механизма 8, происходящее в результате захвата предмета, вызывает увеличение компенсирующего момента MKI (Мк1 - компенсирующий момент, создаваемый разгрузочным механизмом 8 относительно оси 17) на величину АМк,.
При освобождении от предмета сигнал с порогового чувствительного элемента 11 вводится на нормально замкнутую электромагнитную муфту 4 и электродвигатель 1 - происходит сброс приращения компенсирующего момента.
Формула изобретения
Привод протеза при вычленении плеча, содержащий механизмы плеча и локтя, дистальное звено с кистью и пружинный разгрузочный механизм с электроприводом регулирования, выполненным в виде передачи винт - гайка, отличающийся тем, что, с целью устранения компенсаторных движений при управлении и обеспечения автоматической саморазгрузки привода при захвате кистью предметов, механизмы плеча и локтя выполнены в виде электродвигателей с редукторами,
на выходе электродвигателя механизма плеча установлены дифференциал и электромагнитная муфта, выходные шестерни дифференциала кинематически связаны с редуктором механизма плеча, передачей винт - гайка разгрузочвого механизма и электромагнитной муфтой, а в пальцах кисти закреплен пороговый чувствительный элемент, например тензодатчик, электрически связанный с электродвигателем механизма плеча и электромагнитной муфтой.
Источники информации, принятые во внимание при экспертизе:
1. Авт. св. № 411862, кл. А 61 F 5/00, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез руки | 1974 |
|
SU506410A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЕСА ПРОТЕЗИРОВАННОЙ КОНЕЧНОСТИ! !п>&';' S ФУ,; | 1971 |
|
SU418179A1 |
| Устройство для оценки веса манипулируемого предмета | 1974 |
|
SU497017A1 |
| Привод манипулятора | 1978 |
|
SU730562A2 |
| Привод пальцев кисти | 1976 |
|
SU571261A1 |
| ПРОТЕЗ РУКИ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1973 |
|
SU377158A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ПРОТЕЗОВ КОНЕЧНОСТЕЙ | 1995 |
|
RU2123312C1 |
| Электромеханическая кисть | 2017 |
|
RU2663941C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |