1
Изобретение относится к машинам для уплотнения преимуи1ественно связных насыпных грунтов и может быть использовано для работ в стесненных или свободных условиях на объектах промышленно-гражданского, гидротехнического и дорох-сного строительства.
Известно устройство для уплотнения грунта, содержащее гидродвигатель шарнирно-рычажной подвески, на которой смонтирован рабочий орган с силовым приводом.
Однако такое устройство характеризуется неустойчивостью рабочего режима трамбующего рабочего органа, обусловленной значительными изменениями хода ударника с трамбующей плитой из-за неровностей поверхности и пеоднородности физикомеханических свойств уплотняемых насыпных грунтов. Это значительно ухудшает эксплуатационные показатели устройства, так как затрудняет eiO работу и усложняет управление рабочим органом, особенно в рел-;имах -лаиболее производительного уплотнения, осуи1ествляемь х при непрерывном перемещении рабочего органа над поверхностью грунта. Кроме того, в устроястве отсутствует система автоматического включения, обеспечивающая запуск рабоче го органа только при ваакмодействии трамбующей плиты с грунтом, а силовой привод рабочего органа, содержащего значнгельное число вaaиv}oдeйcтвyющIIx между собой подвижных частей - цилиндра, поршней со ; штоком, элементов распределнтельнЪй, спс
ISмы, характеризуется сложностью конструкци.
Цель изобретення - повышение эксплуатаиионнь Х и технологических характеристик устройства.
Для этого устройство снабжено управляющей катушкой индуктивного датчика, соединенной спусковь5м блоком, датчиком тока, соединенным через систему временнь х интервалов, индикатор состояния и блок пи
тания с электромагнг том гидрораспредели- теля, устанавливаемого на питаюшек магистрали гидродБИгателя шарнирио-рычажной, подвески, причем силовой привод выполнен в виде электромагнитного двигателя, снаб-
женного бyфepны устройствоУ с днамагнитfcJM трубчат1:К«( сц-ержнем,, на хотором здреплена управляющая катушка нвдуктивноо , а Ktvryj.uKa .- шюстотО хода якоя эле«;трома1нит1-:о;о двнгате:ля соед. датчико1 з -тока, при &том янюрь электрсь- g агнитного двиггг« ед5): вы аолнен с осевьтк аналом,, в л:от1 р ;)м помещен дЕамагнигаь й рубчатый стержвнь буферного ycrpoi-icTBa,
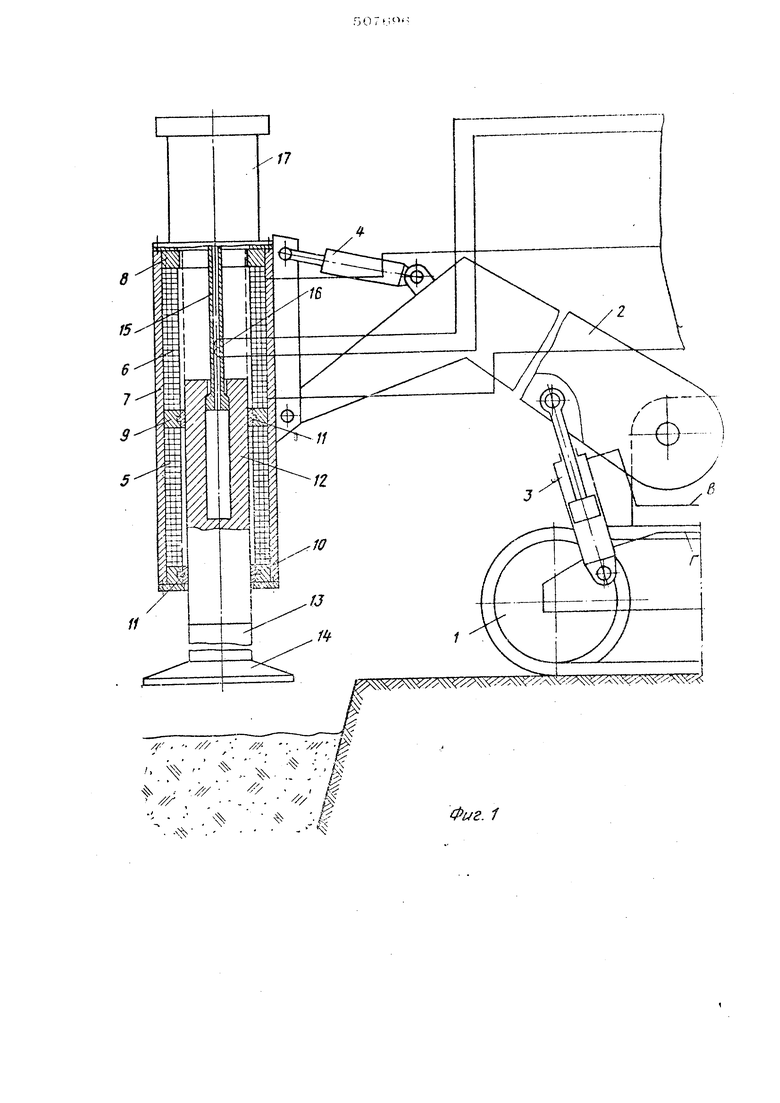
На фиг, 1 показана констЕ)укиия устройтва для yrsnoi HentJii 1 рунта5 я а фкг. 2 - |Q хеыа управления рабочн.- р;роиес:сом.
Устройство ссцер5кнг маш;-1ну 1 с шарнярно-рычажкоЗ пойвест ой 2 я гэдродвй- Гйтелем 3. В го;юиноЁ части подвески: но--средством гвдродв -ггагел.ч ст.лонтарован цабочйй орган, Сияскуой ггрквод vjui6o4.9ro органа эьпзоннен в вид э-лектромап итно1 0 двигателя, соцержаидаго катушин 5 i-j 6 paбочего к хозюстоГО хода, в;огоры8 afiSTSoчены в магнитопрогзод, сс-ото-ягцкй из яр- go ма 7, верхпего средггвго и и:ижнегО 8t 9 к 10,. Б направляюшкх 11 расположен ф рромаг11лт1::ый як.орь 12, соедк-ненкый с rj.OMOurfoK) «гок-гагнитмого звена 13 с рабочим органом 14, При BXJi oseiiHOM дви-- : гатепе якорь удерлшвае-тся ъ й.ат;ушках бур-тиком ду1амагнитно1О труочйГОго стержня ISf содержащего упраепяющую катуи|ку 16 ни дуктивкого датчика с стомы уиравлегша рэбочим процоссок; э стройства. Стержень 15 до входк-т в осевой к;анал як. ч соед,ик(ви ; ПОДВИЖНОЙ частью oytepworo устройства 17 , снабжетшого, например, упругкх алиментов.,
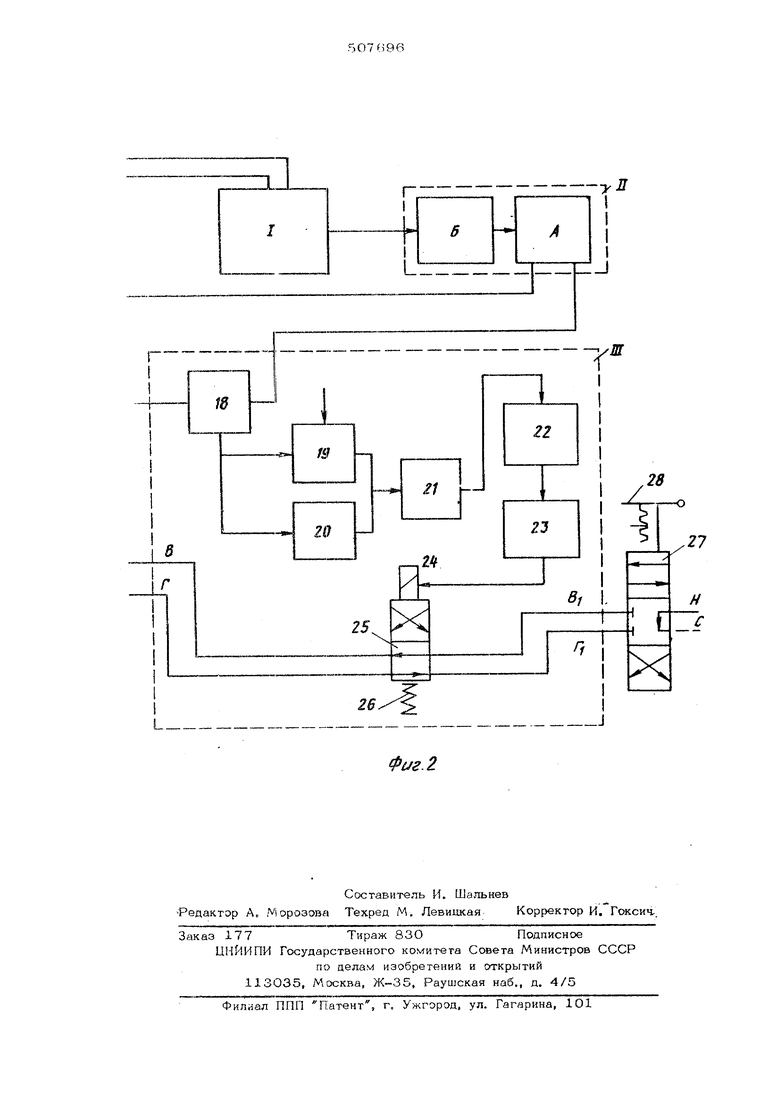
Система управленпй (см., фиг., 2) имеог- ;Щ пусковой блок 1, систему I пи-тчшия к сие тему Ш аБЧОрег-упиропания. Систех а И литанил имеет г:илоу1Ой бмгк Л и бяок Б упрзвпення, Б скстэму 1И шторегулирован:-- зходят; датчик J.8 -сгк.а, включенный в цепь W цитакня катуш;с« 6 хо;госто)-о хода элек-« громагяктБОго двигатя ля, генератор 19 STanoHKOiO K:/iny-jij: ca, реяой:1вн схема 20 схема 21 рааноит г, обраэуюшие систему сравнения ременчь;/; siWTepBenOFb и индя- К катор 22. зостохния. Индикатор состояния связан с б. 23 олоктоо Гэгни- та 24, yripaejiUK-SJior-T дву}шози ё) гн-flpopacnpe,aenr;;Te.i.eh/F :;--). сна5ик;гпьг. возвратной Т1ружиио( 26„ Гидрораспредели™ твпь 25 встроен в irr.iai-ine магкстиали штокоЕОй и nrjpiKupr oO У1ОлО::тей гн;Арод.вм -rarejt- 3,
Мри этом . агист :.аль штокоаой го.яости раз.п,еп57йтся те участки В-В , а м.агистраль поршнецои по7Юст1 - ьа часткн Г-Г, Участки Е .,. я Г . магмстрглей- соедкнэны с трехпозициоШ.м-, адг ораспрсделигелем 27, который зходит п 5;iGK п дрораспределите-лей базовой маидкяы и управляет гидроцвк гатепем 3,. Переключение гидрораспредели1 «з.ггя осуи1.вствпяет рычаг 28,
В нерабочем состоянии устройства эпектрог.шгнита 24 обесточена з гндрораспределнтель 25 соединяет между собой yiacTKV каждой нз питающих магистраЛ9Й гкдродвигатепм 3. Гидрораспределитель нэл:одится в нейтральном попон ении. Участки В .и ГУ магистралей не сообщаются с напорным И и СЛИВНЫМ С каналами гидроcvjcTefvibio Якорь 12. находится в крайнем положении и опирает ;я-на буртик стержня 1
Устройство работает следующим образом.
Для пуска устройства гидрораспредепи:тель 27 рычагом 28 переводится из нейтрального положен.ия в рабочее, при котором напорный клапан Н соединяется с учаском В J, ктагистрапи штоковой полости, а сливной канал С с участком Г магистрали пг,ршневой полости гндродвигателя 3, Гидродвигатель начнет опускать подвеску 2 с рабочим opraHOKf.
При воздействии на рычаг 28 для переключения гидрораспределителя 27 в рабочую позицию автоматически включается пусковой блок: I, к. запитывает катуш- :ку 16 индуктивного датчика переменным высокочастотным напряжением
Пс мере опускания подвески 2 рабочий орган 14 достигнет поверхности т-рунта, после чего якорь 12 остановится. Стержень 15 будет продолжать движение вниз Емесге с корпусом силового приводт и по чстеченкя некоторого времени катушка 16 индуктивного датчика погрузится в осевой канал якоря 12. Индуктюнсе сопротивлеива катушки резко возрастает и, следовательБ-О. изменится ток в ее цепи. Но этому сигналу пусковой блок 1 вырабатывает импульс, обеспечивающий срабатыБан е бло ка Б управления, который ocyщecтвJ;яeт попеременную подачу питания в катушки 5 и 6 холостого и рабочего хода.
Под де.йстБием электромагнитных сил катушек якорь 1.2 совераает возвратно-поступательное движение, нанося в конце рабочего хода рабочим 14 удары по поверхности грунта. Причем, пусковой блок не срибатьюает при последующих погружениях катушки 16 индуктивного датчика в осевой канал ккоря. Перенос рабочего ор гане иа.а, поверхносгьы) грунта в процессе. уплотнения осуществляется поступательным перемеи ечием к аашны 1 и поворотом подвески 2,
С момента пуска электромагнитного двигателя управление работой гидродвигателя 3 осуществляет система П. авторегулкрования Возмущающим воздействием па н-че являет ся отклонение длительности импульса тока в катушке 6 холостого хода от оптимальгного значения. Оптимальная длительность тока соответствует такому ходу якоря в ка тушке 6 холостого хода, при котором дви гатель работает устойчиво в режиме, обеспечивающем наибольшую эффективность уплотнения, Система 111 авторегулирования функционирует следующим образом. При очередной подаче питания в катуш,ку 6 холостого хода сигнал от датэдка 18 тока подается на генератор 19 эталонного импульса и релейную схему 2О. Гене:ратор вырабатывает эталонный имп;льс пря;моугольной формы, длительность которого со ответствует оптимальной длительности тсжа катушке 6 холостого хода. Релейная схема вырабатывает прямоугольный импульс, по амплитуде равный эталонному, а по дли тельности - соответствующий времени действия тока в катушке 6 холостого хода. Оба импульса поступают на схему 21 разности, где они вычитаются. Если импульсы равны, напряжение на выходе схемы разности Отсутствует. При ударе рабочего, органа 14 по грунту низкой начальной плотности или из-за неровности поверхности грунта, ход якоря 1 может увеличиться настолько, что при его последующем движении вверх длительность тока в катушке холостого хода превысит оптимальное значение. В этом случае на выходе схемы 21 разности будет напряжение того знака, который соответствует уве личению импульса, релейной схемы по сравнению с эталонным импульс ы гeнepaтoра 19, По этому сигналу индикатор 22 состояния формирует имттульс, под действием которого блок 23 питания обесточивает обмотку ектромагнита 24 или не подает в обмотку питание, когда она обесточена. При отсутствии напряжения на выходе схемы 21 разности, что бьгоает при равенстве импульса релейной схемы эталонному, питание в обмотку электромагнита 24 также не поступает. Таким образом, если сразу после включения силового привода длительность тока в катушке холостого 6 хода оказывается выше или равна оптимальной, гидрораспределитель 25 остается в исходной позиции и гидродвигатель 3 продолжает опускание подвески 2, По мере опускапин подвескп ход якоря 1 при ударах рабочего органа 14 по грунту уменьшается. Ход якоря мокет также умень шиться из-за встречающихся при уплотнении неровностей поверхности грунта или попадания трамбующей плиты на участки грунта с пОБЫшен1;ой плотностью. С сокращением хода якоря падает длительность импульса тока в катушке холостого хода. Когда длительность тока в катуч1ке окажется ниже оптимальной, изменится знак напряжения на выходе схемы 26 разности 21, так как импульс релейной схемы 20 уменьшится по сравнению с эталонным. , По этому сигналу индикатор 22 состояния вырабатывает импульс, под действием которого блок 23 питания подает Tcai в обмотку электромагнита 24, Газораспределитель 25 переключается во вторую позицию, сообщая поршневую полость гидродвнгателя 3 с напорным кaнaлo К, а штоковую полость - со сливным каналом С. При гидродвигатель 3 будет поднимать подвеску 2 с трамбующим рабочим органом до тех пор, пока длительность тока в катушко |6 холостого хода не превысит оптимально го значения или не станет равной ему. При этом напряжение на выходе схемы 21 разности с-лова изменит знак или будет равно нулю. По этому сигналу прекратится подача питания в обмотку электро,.агнига 24 и гидрораспределитель 25 под действием возвратной пружины 26 переключится в исходную позицию. Гчдрсдвигатель 3 начнет очередное опускание подвески 2. Если длительность тока в катушке 6 холостого хода окажется ниже оптимальной сразу после включения силового привода, работа системы авторегулнрования начнется с подъема подвески 2. Описанные автоматически управляемые движения подвески производятся в течении всего продесса уплотнения, осуществллемо|ГО при непрерьтном перемещении рабочего |Органа над псжерхностъю грунта. Если в конце рабочего хода не происходит соударюния рабочего органа 14 с грунтом, например, из-за значительных неровностей псдаерхностн грунта, якорь 12, двигаясь по инерции вниз, садится на буртик стержня 15 и производит сжатие пакета упругихЭлементов буферного устройства 17. Энергия, накопленная буферным устройством, возвращается якорю при его холостом ходе, что ускоряет восстановление рабочего режима силового привода. Положение якоря 12 относительно катушек 5 и 6 р,абочгго и холостого хода в момент запуска электромагнитного двигателя регулируется пepe Gщeнием управляющей катушки 16 индуктивного датчика в стержне 15. Для подъема подвески 2 с рабочим эрганом после окончания уплотнения гидрораспределитель 27 переключается в рабочую позицию, при которой напорный канал Н соех.,:няется г участком Г, а сливной канал
7
С с участком В/ питающих магистралей ги--дродвигателя 3, При воздействии на рыгчаг 2в для переключения гидрораспределитчзля автоматически выклзочается электромагнитный двигатэль.
Система авторегулирования, управпяк ш.ая гидродЕИгатепем подзескк по длитель нсгсти импульса тока в цепи силовой катушки, обеспечнвает устойчивую работу силоBOio привода Б заданном режиме независимо &т состояния поверхности я изменения СВОЙСТВ грунта. Это значительно улучшает эксплуатационные качества устройства, так как облегчает его управление и повышает э4к|5ек.тнвность работы особенно Б процессе упл.этнения, осуществляемого при непрерыв- aot-j переносе рабочего органа кад пэверх ностью грунта. Улучшение эксплуатацион-, качеств устройства достигается также применением пусковой системы, обеспечивающей автоматическое включение силового привода только при взаимодействии рабочего органа с грунтом.
Применение в качестве силового привода электромагнитного двигателя с одной подзижной частью упрощает конструкцию и техналогшо иаготовнтения устройства.
Ф о р м у п а н я о б р е т е н к я
1„ Устройство для уплотнения грунта, содержащее гидродвнгатель шарнирно рычажной подвески, на которой смонтирован рабочий орган с силовым приводом, о т - п и ч а ю щ е е с п тем, что, с целью повышения эксплуатационных и гехнологических характеристик устройства, оно cнв.б жено управляющей катушкой индуктивного датчика, соединенной с пусковым бпокоМ; датчиком тока;, соединенным через систему временных иктераапов, индикатор состояния и блок питания с aaeKTpOMaraKTOvi гкдрораспределитепя, устанавливаемого на питающей faгиcтpaль гидродвигателя шарнкрно-рычажной подвеске, причем силовой привод выполнен в виде эпектромагг1итного двигателя, снабженного буфернь м устройством с диамагнитным трубчатым с ержнеМз на котором закреплена управляющая катушка индуктивного датчика, а катушка холостого хода якоря электромагнитного двигателя соединена с датчикогч- тока.
2, Устройство по п. 1. о т л и ч а :0-
, е е с я . что якорь электромагнитного двигателя выполнен с осевым каналом, в котором помещен диамагнитный труб чатый стержень буфВрного устройства. Фиг. 1
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитная трамбовка | 1976 |
|
SU629276A1 |
| Машина для уплотнения грунта | 1979 |
|
SU791824A1 |
| Устройство управления трамбующим узлом | 1980 |
|
SU1013535A1 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2003 |
|
RU2248589C1 |
| Электромагнитная трамбовка | 1972 |
|
SU486104A1 |
| ГИДРОИМПУЛЬСНОЕ УДАРНОЕ УСТРОЙСТВО | 1999 |
|
RU2162383C2 |
| УСИЛИТЕЛЬ МАГНИТНОГО ПОТОКА И СИЛОВЫЕ ЭЛЕКТРОТЕХНИЧЕСКИЕ УСТРОЙСТВА НА ЕГО ОСНОВЕ | 2000 |
|
RU2201001C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электропривод | 1980 |
|
SU991557A1 |
| Система электронного управления подачей топлива дизельного двигателя локомотива | 2021 |
|
RU2773297C1 |