1
Изобретение относится к области строительных грунтоуплотняющих машин с навесным трамбуюш.им рабочим органом, используемых для уплотнения преимушественно связных насыпных грунтов.
Известна грунтоуплотняюш,ая машина с дизель-трамбователями, которые свободно подвешены к подвижной раме и в процессе работы опираются на шабот, контактируюший с грунтом. Подвижная рама установлена на несущей раме, смонтированной на шасси, и может перемещаться с помощью канатно-гидравлического привода в поперечном относительно оси шасси направлении 1.
Наиболее близкой из известных является машина для уплотнения грунта, содержащая базовое шасси, несущую раму с установленной в горизонтальных направляющих траверсой с гидравлическим механизмом ее перемещения, имеющим тяговый канат, и смонтированный на траверсе с помощью пружинной подвески трамбующий рабочий орган. Кроме того, машина имеет прижимные гидроцилиндры (2).
Недостатками известных машин являются недостаточная эффективность работы
на связных и крупнообломочных грунтах вследствие необходимости выключения рабочих органов при перемещении траверсы в поперечном направлении во избежание значительных динамических нагрузок на мащину. Выключение же рабочих органов при поперечном перемещении траверсы приводит к значительному снижению производительности, что также отражается на эффективности работы машины.
Целью изобретения является повышение
10 эффективности уплотнения грунта.
Достигается это тем, что в машине для уплотнения грунта, содержащей базовое шасси, несущую раму с установленной в горизонтальных направляющих траверсой с гидравлическим механизмом ее перемещения,
15 имеющим тяговый канат, и смонтированный на траверсе с помощью пружинной подвески трамбующий рабочий орган, механизм перемещения траверсы снабжен смонтнрованным на ней приводным захватом, зажимные элементы которого расположены симметрично относительно тягового каната, а привод захвата связан с трамбующим рабочим органом посредством системы управления.
Зажимные элементы выполнены в виде установленных на имеющей резьбовую часть оси дисков, один из которых соединен с по- . следней жестко, а другой - с возможностью аксиального перемещения, причем привод захвата выполнен в виде размещенной на резьбовой части оси гайки, а система управления приводом захвата выполнена в виде рычажно-щарнирного устройства, одно из звеньев которого жестко соединено с гайкой.
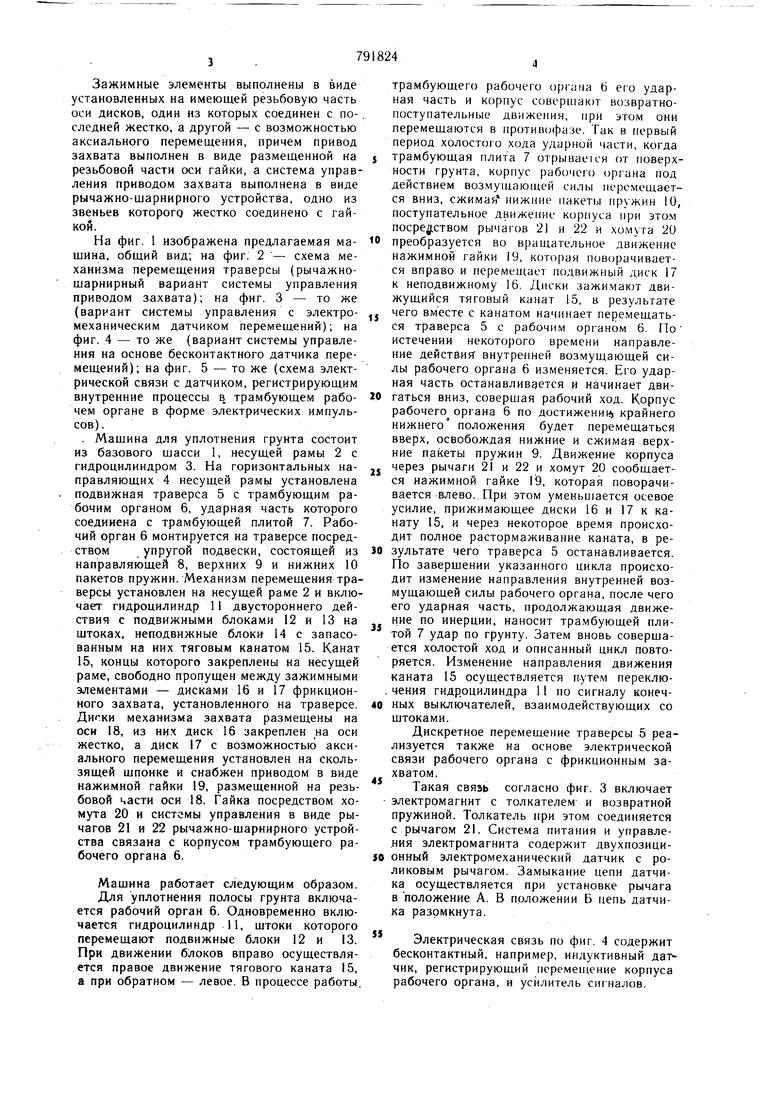
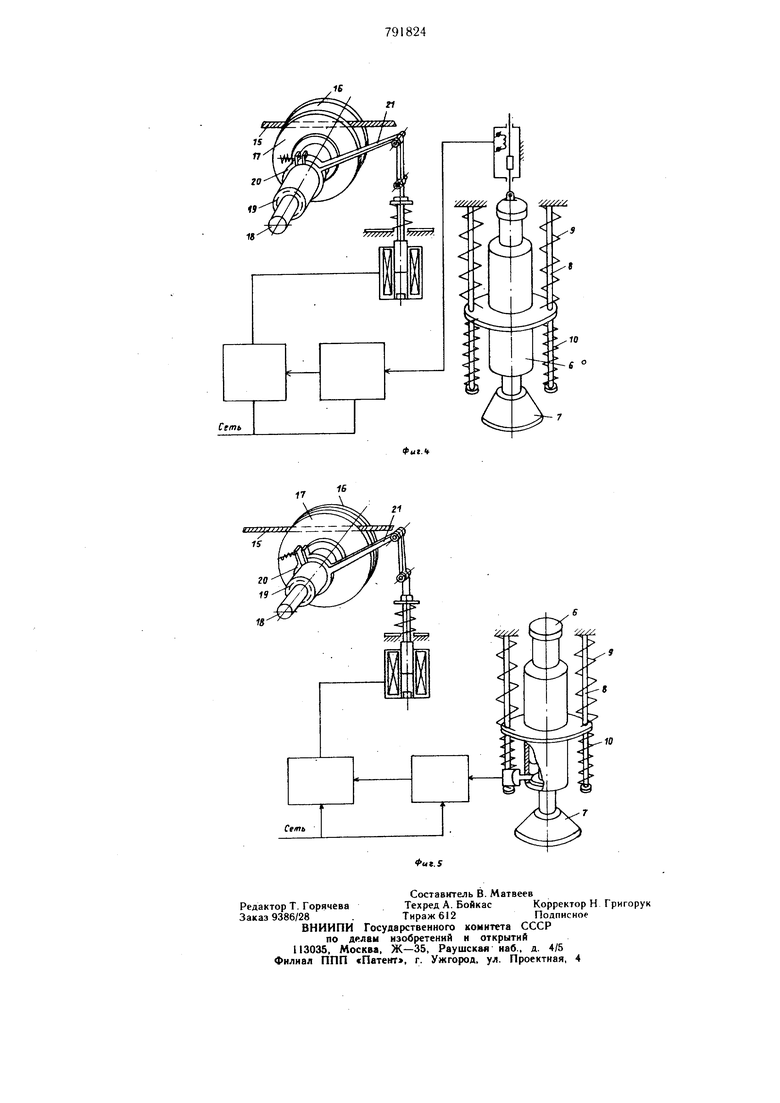
На фиг. 1 изображена предлагаемая машина, общий вид; на фиг. 2 - схема механизма перемещения траверсы (рычажнощарнирный вариант системы управления приводом захвата); на фиг. 3 - то же (вариант системы управления с электромеханическим датчиком перемещений); на фиг. 4 - то же (вариант системы управления на основе бесконтактного датчика перемещений); на фиг. 5 - то же (схема электрической связи с датчиком, регистрирующим внутренние процессы в, трамбующем рабочем органе в форме электрических импульсов).
. Машина для уплотнения грунта состоит из базового щасси 1, несущей рамы 2 с гидроцилиндром 3. На горизонтальных направляющих 4 несущей рамы установлена подвижная траверса 5 с трамбующим рабочим органом 6, ударная часть которого соединена с трамбующей плитой 7. Рабочий орган 6 монтируется на траверсе посредством упругой подвески, состоящей из направляющей 8, верхних 9 и нижних 10 пакетов пружин. Механизм перемещения траверсы установлен на несущей раме 2 и включает гидроцилиндр 11 двустороннего действия с подвижными блоками 12 и 13 на штоках, неподвижные блоки 14 с за пасованным на них тяговым канатом 15. Канат 15, концы которого закреплены на несущей раме, свободно пропущен между зажимными элементами - дисками 16 и 17 фрикционного захвата, установленного на траверсе. Диски механизма захвата размещены на оси 18, из них диск 16 закреплен на оси жестко, а диск 17 с возможностью аксиального перемещения установлен на скользящей шпонке и снабжен приводом в виде нажимной гайки 19, размещенной на резьбовой части оси 18. Гайка посредством хомута 20 и системы управления в виде рычагов 21 и 22 рычажно-шарнирного устройства связана с корпусом трамбующего рабочего органа 6.
Машина работает следующим образом.
Для уплотнения полосы грунта включается рабочий орган 6. Одновременно включается гидроцилиндр И, щтоки которого перемещают подвижные блоки 12 и 13. При движении блоков вправо осуществляется правое движение тягового каната 15, а при обратном - левое. В процессе работы,
трамбующего рабочего органа 6 егО ударная часть и корпус совершают возвратнопоступательные движения, при этом они перемещаются в противофазе. Так в первый период холостого хода ударной части, когда
трамбующая плита 7 отрывамся от поверхности грунта, корпус рабочего органа под действием возмущаюп1ей силы 11е|)смещается вниз, сжимая нижние пакеты пружин 10, поступательное движение корпуса при этом посредством рычагов 21 и 22 и хомута 20
преобразуется во вращательное движение нажимной гайки 19, которая поворачивается вправо и перемещает подвижный диск 17 к неподвижному 16. Диски зажимают движущийся тяговый канат 15, в результате
чего вместе с канатом начинает перемещаться траверса 5 с рабочим органом 6. По истечении некоторого времени направление действия внутренней возмущающей силы рабочего органа 6 изменяется. Его ударная часть останавливается и начинает двигаться вниз, совершая рабочий ход. Корпус рабочего органа 6 по достижении) крайнего нижнего положения будет перемещаться вверх, освобождая нижние и сжимая верхние пакеты пружин 9. Движение корпуса
, через рычаги 21 и 22 и хомут 20 сообщается нажимной гайке Г9, которая поворачивается влево. При этом уменьшается осевое усилие, прижимающее диски 16 и 17 к канату 15, и через некоторое время происходит полное растормаживание каната, в результате чего траверса 5 останавливается. По завершении указанного цикла происходит изменение направления внутренней возмущающей силы рабочего органа, после чего его ударная часть, продолжающая движение по инерции, наносит трамбующей плитой 7 удар по грунту. Затем вновь соверщается холостой ход и описанный цикл повторяется. Изменение направления движения каната 15 осуществляется путем переклю. чения гидр.оцилиндра 11 по сигналу конечных выключателей, взаимодействующих со щтоками.
Дискретное перемещение траверсы 5 реализуется также на основе электрической связи рабочего органа с фрикционным захватом.
Такая связь согласно фиг. 3 включает
электромагнит с толкателем и возвратной
пружиной. Толкатель при этом соединяется
с рычагом 21. Система питания и управле.ния электромагнита содержит двухпозици10 онный электромеханический датчик с роликовым рычагом. Замыкание цепи датчика осуществляется при установке рычага в положение А. В положении Б цепь датчика разомкнута.
Электрическая связь по фиг. 4 содержит бесконтактный, например, индуктивный дат чик, регистрирующий перемещение корпуса рабочего органа, и усилитель сигналов. В электрической системе связи по фиг. 5 содержится бесконтактный датчик, преобразующий сигналы поступающего в рабочий орган энергоносителя в электрические импульсы. В качестве датчика может быть использован тензометрический дatчик, регистрирующий давление воздуха или рабочей жидкости в гидропневматическом рабочем органе, трансформатор тока, регистрирующий изменение тока в катушках электромагнитного рабочего органа и т. п. Датчик давления подключается к полости холостого хода ударной части рабочего органа (фиг. 5). Датчик тока включается в цепь катушки холостого хода электромагнитного рабочего органа. Такое выполнение машины устраняет действие на элементы подвески и базовую машину боковых динамических нагрузок, стабилизирует режим рабочего органа. При этом значительно улучшаются эксплуатационные качества машины, создаются предпосылки для полной автоматизации ее рабочего процесса. Формула изобретения I. Машина для уплотнения грунта, содержашая базовое шасси, несущую раму с устамсдаленной в горизонтальных направляющих траверсой с гидравлическим механизмом ее перемещения, имеющим тяговый канат, и смонтированный на траверсе с помощью пружинной подвески трамбующий рабочий орган, отличающаяся тем, что, с целью повышения эффективности уплотнения грунта, механизм перемещения траверсы снабжен смонтированным на ней приводным захватом, зажимные элементы которого расположены симметрично относительно тягового каната, а привод захвата связан с трамбующим рабочим органом посредством системы управления. 2. Мащина по п. 1, отличающаяся тем, что зажимные элементы выполнены в виде установленных на имеющей резьбовую часть оси дисков, один из которых соединен с последней жестко, а другой - с возможностью аксиального перемещения, причем привод захвата выполнен в виде размещенной на резьбовой части оси гайки, а система управле ния приводом захвата выполнена в виде рычажно-щарнирного устройства, одно из звеньев которого жестко соединенно с гайкой. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 175073, кл. Е 01 С 19/34, 1964. 2.Авторское свидетельство СССР № 207245, кл. Е 01 С 19/38, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДБИВКИ ТРУБОПРОВОДА ГРУНТОМ ИЗ ОТВАЛА, ОБОРУДОВАНИЕ ДЛЯ УПЛОТНЕНИЯ ГРУНТА ПОД ТРУБОПРОВОДОМ И ГРУНТОУПЛОТНЯЮЩИЙ МЕХАНИЗМ | 1998 |
|
RU2135699C1 |
| Асфальтоукладчик | 1986 |
|
SU1413172A1 |
| Установка для разработки грунта | 1985 |
|
SU1323670A1 |
| Устройство для уплотнения грунта | 1989 |
|
SU1659587A1 |
| Устройство для вытрамбовывания котлованов | 1983 |
|
SU1135840A1 |
| Установка для вытрамбовывания котлованов | 1983 |
|
SU1151643A1 |
| Устройство для уплотнения грунта | 1989 |
|
SU1701823A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ СКВАЖИН В ГРУНТЕ | 2012 |
|
RU2501930C2 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 1994 |
|
RU2079595C1 |
| Устройство для уплотнения грунта | 1973 |
|
SU507696A1 |
f2
15
Фиг. J
