I
«
Изобретение может быть использовано в машиностроительной и приборостроительной промышленности для размерной обра|ботки толщины неметаллического покрытия на изделиях с металлической основой.
.Известны следящие системы активного контроля размеров, состоящие из сравнивающего устройства, усилителя, измерительного блока, устройства блокировки и силового привода, на котором установлена обра батывающая головка, содержащая обрабаты- ваюцшй инструмент, устройство закрепления обрабатывающего инструмента, приводную шестерню, измерительный элемент, бесконтактный токосъемник с неподвижной кату1лкой. В качестве измерительных элементов применяются вихретоковые преобразователи.
В этих системах конструкции датчиков не позволяют располагать их близко рабатывающему инструменту, так как последни ; влияет на точность измерения; кроме того, при расположении датчика на некотором расстоянии от обрабатывающего инструмента, а ;не в зоне обработки, неизбежно возникает
значительная погрешность при обработке изделий, имеющих малые радиусг кривизнИ обрабатываемой поверхности.
Цель изобретения - расширение технологических возможностей системы, ум ньше- ние погрешности при обработке поверхностей, имеющих сложную конфигурацию, и при высоких скоростях обработки.
Это достигается тем, что измерительный элемент выполнен в виде измерительного съемного модуля с измерительной катушкой вихретокового преобразоватепя и подвижной катушкой токосъемника, жестко закрепленного внутри обрабать В1Ю иего инструмента, причем измерительнагг катушка :вихретокового преобразователя измерительного съемного модуля установлена у торца обрабатывающего инструмента, а неподвиж-.ная катущка бесконтактного токосъемника вьшолнена в виде цилиндра, высота котопог. .превышает высоту порвижной катушки токо- ;съемника измерительного съемного модуля на величину удвоенного возможного осввого ;смещения хвостовика обрабаты 5ак1щего -инст.румента относительно среднего положения.
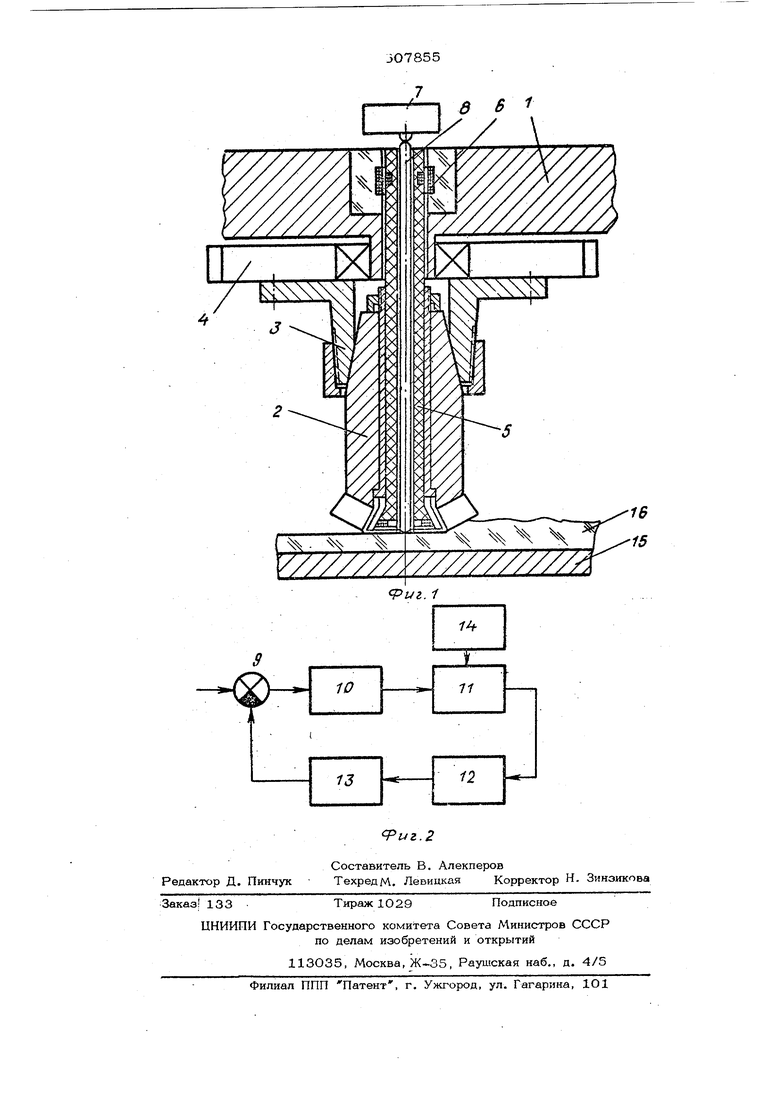
На фиг. 1 иэофажена обрабатывающая головка системы; на фиг. 2 - структурная схема следящей системы активного контроля.
Офабатывающая головка включает в себя корпус 1, обрабатывающий инструмент 2, устройство закрепления обрабатывающего инструмента 3, приводную шестерню 4, иэ мерительный съетиный модуль 5 с измерительной катушкой вихретокового преобразователя и подвимшой катущкой токосъемника, бесконтактный токосъемник 6 с неподвижной катушкой, концевой выключатель 7 и шток 8.
Структурная схема следящей системы содержит сравнивающее устройство 9, усилитель 10, силовой привод 11, измеритвль-j ный блок 12, согласующее устройство 13 и устройство блокировки 14,
Принцип работы описанной системы заключается в следующем.
Сигнал с измерительного блока 12 (фиг. 2), пропорциональный расстоянию от измерительной катушки до подложки 15 ((|я1г. l), поступает через согласующее уст- ройотво 13 в сравнивающее устройство 9, где производится его сравнение с задающим сигналом, со сравнивающего устройства сиг- нёл ошибки усиливается и с выхода усилителя 10 поступает в силрвой привод 11, кото рый перемещает обрабатывающую головку (фиг. 1). Перемещение головки происходит до тех пор, пока сигнал с измерительной катушки вихретокового прео азователя и задающий не будут равны. Поскольку перемешение измерительного модуля и обрабатьгоающего инструмента происходит совместно, то толщина о абатьгоаемого покрытия 16
(фиг. 1) будет пропорциональна задающему сигналу.
формула изобретения
Бесконтактная следящая система активного контроля размеров для обработки не-. металлических покрытий на металлической основе, состоящая из сравнивающего устройства, усилителя, измерительного блока, устройства блокировки и силового привода, на котором установлена обрабатывающая головка, содержащая обрабатывающий инструмент, устройство закрепления обрабатывающего инструмента, приводную шестерню, измерительный элемент, бесконтактный токосъемник с неподвижной катушкой, отличающаяся тем, что, с целью расширения технологических возможностей системы, уменьшения погрешности при обработке поверхностей, имеющих сложную конфигурацию, и при высоких скоростях обработки, измерительный элемент выполнен в виде измертельного съемного модуля с измерительной катушкой iвихретокового преобразователя и подвижной катущкой токосъемника, жестко закрепленного внутри обрабатывающего инструмента, причемизмерительная катущка вихре- токового преобразователя измерительного съемного модуля установлена у торца обрабатывающего инструмента, а неподвижная катушка бесконтактного токосъемника выполнена в виде цилиндра, высота которого превышает высоту подвижной катушки токосъемника измерительного съемного модуля на величину удвоенного осевого смещения хвостовика обрабатывающего инструмента относительно среднего положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесконтактного активного контроля деталей | 1976 |
|
SU599964A2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО АКТИВНОГОКОНТРОЛЯ | 1973 |
|
SU435929A1 |
| Копировальный станок для изготовления сопрягаемых элементов | 1978 |
|
SU670416A1 |
| Способ бесконтактного измерения температуры электропроводящих цилиндрических изделий | 1982 |
|
SU1125479A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ МЕДНОЙ КАТАНКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2542624C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕПЛОВЫХ ЗАЗОРОВ В СТЫКАХ РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2000 |
|
RU2192982C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗНОСА БОКОВОЙ ПОВЕРХНОСТИ ГОЛОВКИ ЖЕЛЕЗНОДОРОЖНОГО РЕЛЬСА | 2002 |
|
RU2236971C2 |
| Следящая система | 1974 |
|
SU525922A1 |
| СТАНОК ДЛЯ ЭЛЕКТРОХИМИЧЕСКОЙ РАЗМЕРНОЙ ОБРАБОТКИ ЗУБЧАТЫХ КОЛЕС | 1972 |
|
SU428901A1 |
| Блок вращающихся магнитных головок | 1980 |
|
SU934544A1 |