Изобретение относится к оборудованию для транспортировки грузов летательными аппаратами, а именно к системам внешней подвески груза к вертолету.
Известна система внешней подвески груза к вертолету, содержащая силовой трос с грузозахватным устройством, силовой замок и лебедку с дополнительным тросом [1].
Такая система внешней подвески обеспечивает стабилизацию груза в заданной точке при монтажных работах путем выведения вертолета автопилотом в положение, при котором отклоненный внешним воздействием на груз силовой трос занимает вертикальное положение. Однако эта система не обеспечивает стабилизацию силового троса с грузозахватным устройством при нацеливании последнего на груз, так как силовой трос без груза под действием внешних факторов совершает колебания относительно места застропки, которые невозможно стабилизировать автоматом из-за насоответствия мгновенного значения угла наклона силового троса в месте установки рычагов автопилотного датчика фактическому положению грузозахватного устройства в этот момент.
В качестве прототипа выбрана система внешней подвески груза к вертолету, содержащая силовой трос, верхний конец которого жестко закреплен в силовом замке, грузозахватное устройство, размещенное на нижнем конце силового троса, и лебедку с дополнительным тросом, пропущенным через трубчатые элементы [2].
Эта система позволяет уменьшать свободную длину силового троса без груза и тем самым позволяет несколько уменьшать амплитуду его колебаний, но не упрощать процесс нацеливания грузозахватного устройства на груз, так как с уменьшением свободной длины силового троса возрастает необходимая точность позиционирования вертолета над мостом застропки груза.
Задачей изобретения является улучшение эксплуатационных характеристик.
Это достигается тем, что в системе внешней подвески груза к вертолету, содержащей силовой трос, жестко укрепленный верхним концом в силовом замке, грузозахватное устройство, размещенное на нижнем конце силового троса, и лебедку с дополнительным тросом, пропущенным через трубчатые элементы и установленным вдоль силового троса, предусмотрено, что трубчатые элементы установлены последовательно один в другом с образованием телескопической штанги. При этом верхний трубчатый элемент прикреплен к вертолету, а дополнительный трос прикреплен к нижнему элементу, имеющему кольцо, охватывающее силовой трос.
Кроме того, для перемещения грузозахватного устройства верхний трубчатый элемент телескопической штанги может быть прикреплен к вертолету одним концом посредством карданного шарнира с возможностью перемещения другого конца в двух взаимно перпендикулярных направлениях при помощи силовых приводов.
Кроме того, силовые приводы могут быть снабжены измерительными преобразователями перемещения рабочих органов приводов, связанными электрическими цепями с автопилотом.
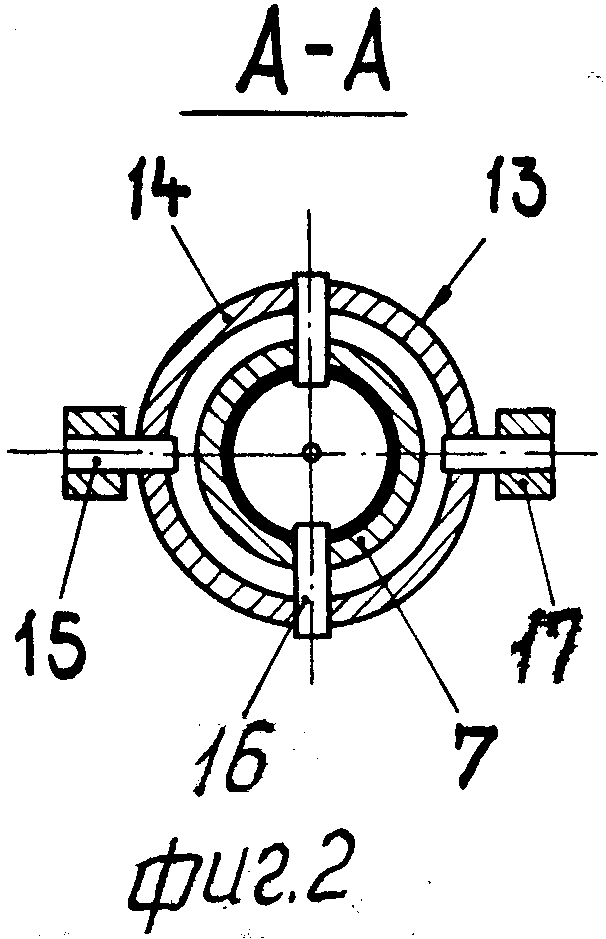
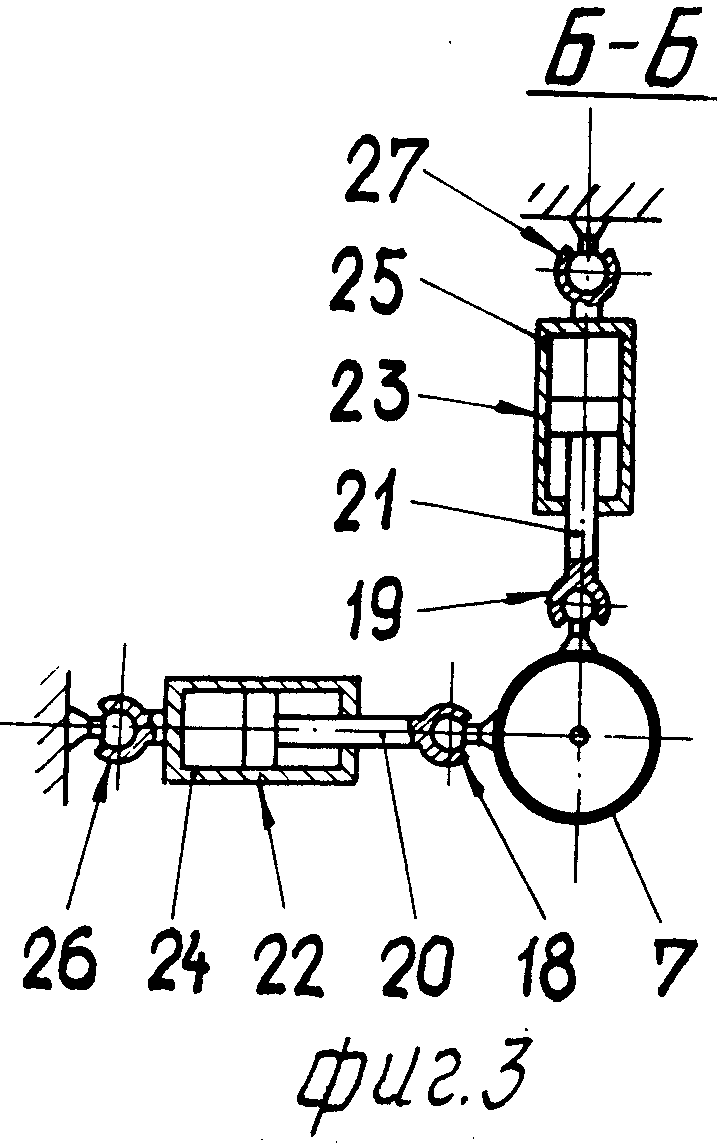
На фиг. 1 представлена система внешней подвески груза к вертолету, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Система внешней подвески груза к вертолету содержит силовой трос 1, верхний конец которого жестко закреплен в силовом замке 2, установленном в корпусе 3 вертолета, грузозахватное устройство 4, размещенное на нижнем конце силового троса 1, и лебедку 5 с дополнительным тросом 6, установленным вдоль силового троса 1. Трос 6 пропущен через трубчатые элементы 7 и 8, его нижний конец прикреплен посредством зажима 9 к нижнему элементу 10. Трубчатые элементы 7, 8 и нижний элемент 10 последовательно входят один в другой и образуют телескопическую штангу 11. Верхний трубчатый элемент 7 телескопической штанги 11 прикреплен к корпусу 3 вертолета. К элементу 10 жестко прикреплено кольцо 12, охватывающее трос 1. Верхний трубчатый элемент 7 прикреплен к корпусу 3 вертолета посредством карданного шарнира 13, который содержит кольцо 14 с жестко закрепленными на нем пальцами 15, 16, установленными подвижно в отверстия верхнего трубчатого элемента 7, при этом втулка 17 жестко закреплена на корпусе 3. К трубчатому элементу 7 со смещением по высоте прикреплены посредством сферических шарниров 18 и 19 штоки 20 и 21 гидроцилиндров 22 и 23. Корпусы 24 и 25 гидроцилиндров 22 и 23 прикреплены посредством сферических шарниров 26 и 27 к корпусу 3. Гидроцилиндры 22 и 23 расположены в двух взаимно перпендикулярных направлениях при вертикальном положении штанги 11 с возможностью отклонения каждого в двух направлениях из этого положения и фиксации в любом из занимаемых положений рабочей жидкостью. Штоки 20 и 21 снабжены измерительными преобразователями перемещения (не показаны), которые связаны электрическими цепями с автопилотом. При помощи лебедки 5 с тросом 6 изменяют длину штанги 11 от максимальной до минимальной, меняя при этом положение кольца 12 на тросе 1 от нижнего до верхнего.
Для нацеливания грузозахватного устройства 4 на груз, например для автоматической застропки штангу 11 раздвигают, гидроцилиндры 22 и 23 устанавливают в положение, при котором трос 1 занимает вертикальное положение, фиксирует гидроци- линдры 22 и 23 и вертолетом производят предварительное нацеливание на груз. При этом штанга 11 с кольцом 12 препятствует колебаниям троса 1, вызванным действием внешних факторов, а характеp остаточных колебаний или раскачиваний при необходимости изменяют путем перемещения кольца 12 вдоль троса 1.
Для точного нацеливания грузозахватного устройства 4 на груз гидроцилиндрами 22 и 23 перемещают в требуемом направлении нижний конец штанги 11 и при необходимости, используя передаваемые на автопилот сигналы измерительных преобразователей перемещения штоков 20 и 21, выводят вертолет в положение, при котором силовой трос 1 (или штанга 11) занимает вертикальное положение. После застропки груза расфиксируют гидроцилиндры 22 и 23, после чего штанга 11 с кольцом 12 не оказывают влияния на трос 1. При этом возможно использовать измерительные преобразователи для стабилизации груза при монтажных операциях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2030331C1 |
| Грузозахватная система | 1990 |
|
SU1787918A1 |
| УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА ВЕРТОЛЁТА | 2022 |
|
RU2785246C1 |
| Система внешней подвески груза квертолету | 1973 |
|
SU509495A1 |
| АВИАЦИОННОЕ УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА | 2021 |
|
RU2772134C1 |
| Полиспастное устройство | 1973 |
|
SU460236A1 |
| УПРАВЛЯЕМЫЙ АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ-КРАН | 1995 |
|
RU2098318C1 |
| УСТРОЙСТВО ДЛЯ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2763621C1 |
| УСТРОЙСТВО ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2308400C2 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
Изобретение относится к оборудованию для транспортировки грузов летательными аппаратами. Цель изобретения - улучшение эксплуатационных характеристик. Система внешней подвески груза к вертолету содержит силовой трос 1, жестко закрепленный верхним концом в силовом замке 2, грузозахватное устройство 4, лебедку 5 с дополнительным тросом 6. Трос 6 пропущен через трубчатые элементы 7,8 и соединен с нижним элементом 10, имеющим кольцо 12, охватывающее силовой трос 1. Элементы 7,8,10 последовательно входят один в другой, образуя телескопическую штангу 11. Элемент 7 прикреплен к вертолету посредством карданного шарнира 13 и соединен с силовыми приводами, имеющими измерительные преобразователи перемещения рабочих органов приводов, связанных электрическими цепями с автопилотом. 2 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 0 |
|
SU377276A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
