(54) УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1993 |
|
RU2085019C1 |
| Реверсивный тиристорный преобразователь частоты | 1975 |
|
SU680123A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Способ управления асинхронным электродвигателем с частотно-импульсным регулированием напряжения | 1988 |
|
SU1653122A1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1211843A1 |
| Электропривод переменного тока | 1975 |
|
SU661705A1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1972 |
|
SU442561A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
1
Изобретение относится к области регулирования электроприводов переменного тока на базе асинхронных короткозамкнутых двигателей, питаемых от статических преобразователей частоты с явновыраженным зве- ном постоянного тока.
В частотно-регулируемом электроприводе используются устройства управления с компенЬацией падения напряжения на активных сопротивлениях обмотки статора двигателя, Известно устройство, осуществляющее поддержание постоянного отношения внутренней 3. д. с. двигателя к частоте управления, т, е. постоянства магнитного потока двигателя.
Устройство содержит преобразователь , частоты с подключенным к нему асинхронным электродвигателем, решающее устройство на вход которого подаются сигналы тока, напряжения и частоты с выхода преобразователя,- а выход подключен к регулятору : напряжения.
Недостаток известного устройства заключается в снижении перегрузочной способности асинхронного двигателя в области
низких частот из-за недостаточной токовой компенсации.
Целью изобретения является раз эаботка устройства управления асинхронным электродвигателем, выполненного по принципу компенсации падения напряжения на активных со противлениях обмотки статора,.в котором без применения датчиков скорости и момента обеспечивается поддержание постоянной перегрузочной способности двигателя ро моменту во всем диапазоне регулирова йия, в том числе и в области низких частот.
Поставленная цель достигается тем, что устройство содержит цепь жесткой отрицательной связи по реактивному току двигателя, подключенную К упомянутому регулятору напряжения, причем сигнал отрицательной обратной связи вводится в канал регулирования напряжения, снимая форсировку выходного напряжения инвертопп i . режикцах холостого хода электродвиготе.чя и обеспечивая заданную перегрузочную способность в режимах нагрузки.
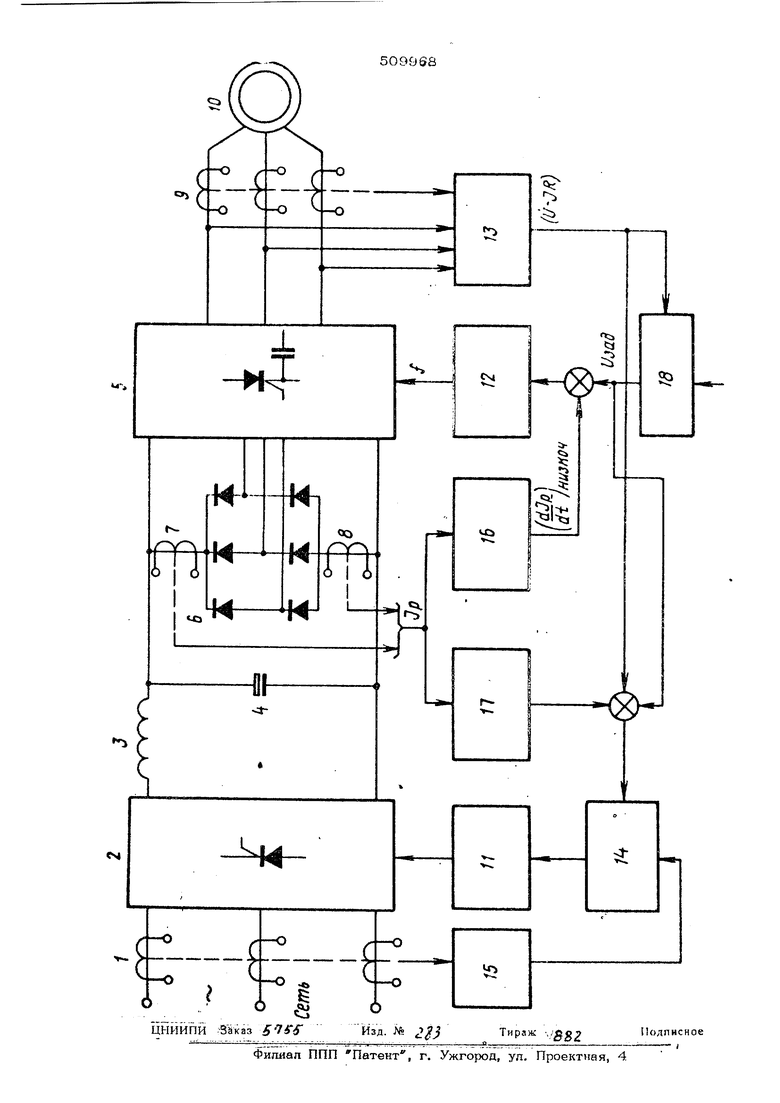
На чертеже приведена принципиальная схема предпагаемого устройства. 3 Устройство содержит трансформаторы то ка 1 на входе выпрямителя, управляемый тир сторный выпрямитель 2, подключенный через сглаживающий дроссель 3 и конденсатор 4 к независимому инвертору 5, выходные зажимы которого подсоединены через диоды обратного тока 6, и датчики реактивного тока 7, 8 к конденсатору 4, а через трансформаторы тока 9 к асинхронному двигателю 10; регуляторы напряжения 11 и частоты 12, блок обратной связи по э, д. с. 13, подключенный через усилитель 14 и блок токоограничения 15 к регулятору напряжения, блок частотной коррекции |l6 и блок компенсации 17, подключенные к датчикам реактивного тока, а таюке задатчик интенсивности 18, соединенный с регу.ляторами частоты и напряжения. Устройство работает следукшаим образом Сигнал задания Uсуммируется алгебраи чески с сигналом блока 16 частотной коррекции, пропорциональным производной от низкочастотной составляющей. сигнала реек тивного тока двигателя, и поступает на вход регулятора частоты 12, определяй частоту на выходе инвертора 5. Одновременно сигнал задания cyivaviKpyer ся с сигналом блока 13 обратной связи по э. д. с, двигателя 10 и сигналом блока компенсации 17 по реактивному току и через усилитель 14 поступает на вход регулятора напряжения 11. Сигнал блока компенсации 17, пропорциональный реактивному току двигателя, снимает форсировку напряжения на холостом ходу двигателя, а при увеличении нагрузки увеличивает его перегрузочную способность за счет повышения форсировки напряжения, Величина сигнала на блока 17 выбирается такой, чтобы в области высоких и средних частот диапазона регулирова- ния этот сигнал практически не оказывал влияния на регулятор напряжения РН, т.е. в этом случае в процессе регулирования напряжения участвуют сигнал задания (J и сигнал с выхода блока 13 обратной связи по внутренней э. д. с. двигателя, В области низких частот относительная величина сигнала с выхода блока 17 возрастает , этот сигнал начинает оказывать. воздействие на регулятор напряжения 11, автоматически осуществляя изменение степени форсировки статорного напряжения двигателя в зависимости от изменения момента нагруз- ки. Система регулирования настраивается таким образом, чтобы в области низких частот при номинальной нагрузке скольжение двш- ателя было равно номинальному. Сигнал с выхода блока 1,7 в этом случае минимальный. При сбросе нагрузки сигнал с выхода блока 17 возрастает, осуществляя форсировки напряжения до необходимой величины, исключающей насыщение магнитной системы машины. Формула изобретения Устройство для частотного управления асинхронным электродвигателем, содержащее преобразователь частоты, к регулятору напряжения которого подключен блок обратной связи по э. д. с., а ко входу регуля- тора частоты указанного преобразователя подключена цепь гибкой обратной связи по реактивному Toky двигателя, отличающееся тем, что, с целью увеличения перегрузочной способности электродвигателя в об. низких частот, оно содержит цепь жесткой .отрицательной обратной связи по peaKTHBHON току, подключенную к упомянутому регулятору напряжения.
