ключей к второму входу блока суммирования частот, причем первый нелинейный блок канала обратной связи по току реализует функцию
UT,-O при l5 5H)
U,, i, (Ч-Чн) .
т,) р ч боте J
где м
Up jLltoj oTc сигналы соответственно выходной, входной
Изобретение относится к электротехнике, а точнее к частотно-управляемым тяговым электроприводам с асинхронными короткозамкнутыми двигателями, и может быть использовано при создании тяговых приводов осей колесных транспортньк средств с автономными источниками энергии.
Цель изобретения - повьгаекие быстродействия тягового электропривода.
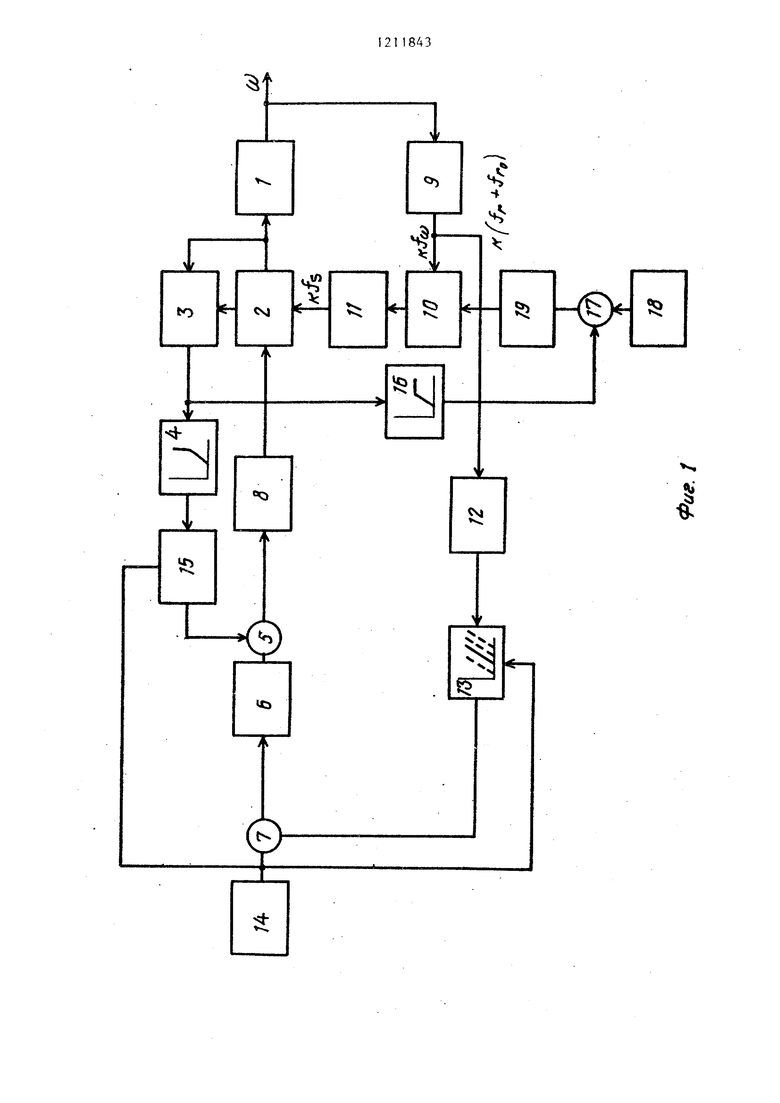
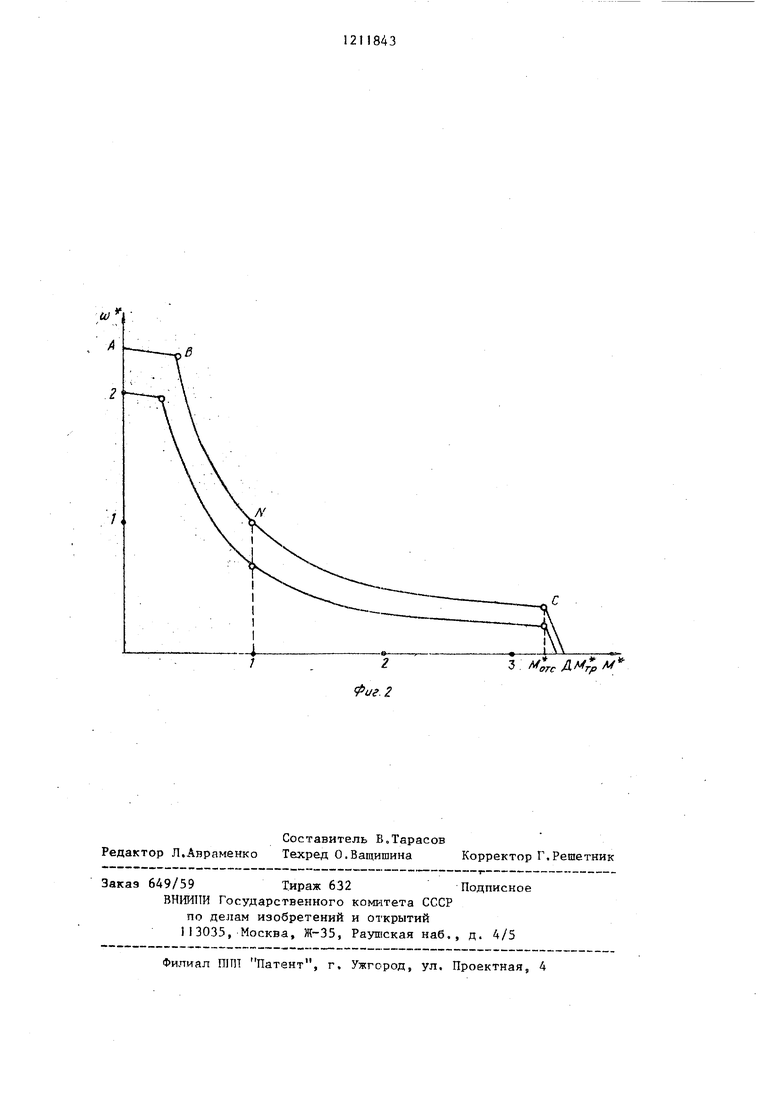
На фиг.I приведена функциональная схема частотно-управляемого тягового электропривода; на фиг.2 - характеристики электропривода.
Частотно-управляемый тяговый электропривод (фиг.l) Содержит асинхронный двигатель (АД) , подвглюченный к преобразователю частоты (ПЧ) 2 с каналом управления частоты напряжения Kis) каналом управления амплитудной напряжения У; , датчик 3 тока двигателя, связанный выходом с входом первого нелинейного блока 4 канала обратной связи по току,, первый блок 5 суммирования, первым входом соединенный через регулятор 6 скорости с выходом второго блока 7 суммирования, а выход первого блока 5 суммирования через регулятор 8 тока соединен с входом канала управления амплитудой напряжения преобразователя частоты, импульсный датчик 9 скорости двигателя, выходом подключенный к первому входу сумматора 10 частот, выходом через усреднитель частоты 11 связанного с входом канала управления частотой напряжения преобразователя частоты 2, Выход импульс211843
н отсечки нелинейного блока; - вьпсодные сигналы;
ЦП-зн J SOTC двигателя соответственно текущий, номинальный и ток отсечки; К,К; , коэффициенты пропорциональности;
U - скорость .вращения электродвигателя ;
i,g - сигнап задания скорости.
ного датчика скорости 9 двигателя через преобразователь 12 частота - напряжение связан с первым входом управляемого нелинейного блока 13 об- ратной связи по скорости, реализующего функцию
и Оприи и ди,,)
(l.cl P Uw Uoтc
Его выход связан с первым входом второго блока 7 суммирования, а вторые второго блока 7 сумтдарова- ння и управляемого нелинейного блока обратной связи по скорости 13 подключены к выходу блока 14 задания скорости. Кроме того, электропривод содержит усилитель 15 с регулируемым коэффициентом усиления, первым входом соединенный с выходом первого нелинейного блока 4 канала обратной связи по току, вторым входом связан- с выходом блока 13 задания скорости, а выходом соединенный с вто- рь5 входом первого блока 5 суммироваНИН,, второй нелинейный блок 16 канала обратной связи по току, реализующий функцию.
и., 0 при
, ( Р
(Чотс Чн) при Ц Цотс; входом соединенный с выходом датчика тока 3 двигателя, а выходом связанный с первым входом третьего блока
суммирования 17, второй вход которого соединен с выходом блока задания частоты тока ротора 18, управляемый генератор 19, входом соединенный с вы3i2
ходом третьего блока 17 суммирования, а выходом связанный с вторым входом блока 10 суммирования частот, причем первый нелинейный блок канала обратной связи по току реализует функцию
и, О при ig ,
5Н
) при i
ГЛц-чч)р
5,(4-i .(О
6 1 1
ото 5
ОТС J
где ic / к
Частотно-управляемый тяговый электропривод работает следующим образом
При появлении управляющих сигма- лов на выходе блока задания скорости 14 (фиг.1) и блока задания частоты тока 18 ротора 5 пропорционального начальной частоте тока ротора на асинхронный двигатель 1 с преобразователя частоты 2 подано напряже ше с частотой if,(, и амплитудой, определяемой величиной сигнала задания скорости. Величина тока статора быст ро нарастает до уровня IS OTC выхода датчика 3 тока подается сигнал на входы первого и второго нелинейных блоков 4 и 16 каналов обрат- рых связей по току. На выходе первого нелинейного блока А канала обратной связи по току появляется сигнал
, К; ( -, отс) через усилитель с регулируемым коэффициентом усиления 15, коэффициент передачи которого определяегея уровнем сигнала задания скорости и,(. , поступает на вы- читаиций вход первого блока 5 суммирования, где он сравнивается с сигналом задания тока, поступающего через регулятор 6 скорости с выхода второго блока 7 суммирования, что приводит к уменьщению сигнала на выходе первого блока 5 суммирования и регулятора 8 тока. Это обеспечивает ограничения тока статора на уровнях, соответствующих допустимым моментом грогания двигателя М,р фиг.2 . Одновременно при токах с,5отс ходе второго нелинейного блока 16 канала обратной связи по току появляется сигнал 0-Г2 к ; (;д()соп4 который суммируется в третьем блоке 17 суммирования с сигналом блока частоты тока ротора 18, На выходе управляемого генератора 19 появляется импульсная последовательность с частотой к1р, соответствующей максимально допустимой частоте тока ротора i , меньшей критической частоты тока ротора , , чем обеспе
4
0
5
0
5
0
5
0
5
0
чквается исключение возможности опрокидывания асинхронного двигателя 1. Привод нач1-шает разгоняться на участках характеристик СД (фиг.2) ограничения момент-а.
При развороте асинхронного двигателя 1 на выходе импульсного датчика 9 скорости (фиг, г) начинает формироваться импульсная последовательность с частотой к 1(0, пропорциональной скорости вращения двигателя. Эта последовательность суммируется в сумматоре 10 частот с импульсной последов ятельностью частоты тока ротора Ki-j и уже результирующая импульсная последовательность через усреднитель чатоты 11 поступает на вход канала угфавления частотой преобразователя Kig. В результате по мере разгона привода частота на выходе преобразователя частоты 2 возрастает, а величина тока статора уменьшается, и при снижении тока до уровня 5 iд изменится коэффициент передачи первого нелинейного блока 4 канала обратной связи по току, на выходе этого блока появится сигнал UTI к;Д1 через ycи Iитeль с регулируемым коэффициентом усиления 15 поступит на вычитающий вход первого блока суммирования 5, где он сравни- дается с сигналом регулятора 6 скорости. Результирующий сигнал через регулятор 8 тока подается на вход канала управления амплитудной напряжения преобразователя частоты, что обеспечивает стабиллзадию магнитного потока асинхронного двигателя на максимально допустимом уровне по условию насыщения машины. Одновременно при токах t 5ц 6 ig somc второй нели- не йный блок канала обратной связи по току 16 выходит из режима отсечки, и сигнал Итг к, ( ) его выходе уменьшается с уменьщением тока (g, снижая частоту тока ротора по мере уменьшения нагрузки двигателя. Таким образом, происходит формирование участка С характеристик (фиг.2), где двигатель работает в режиме стабилизации магнитного потока, и регулирования момента за счет изменения частоты ток а ротора.
При лгменьщении нагрузки уменьшается ток двигателя и при 1% 15 сигналы на выходах первого и второго нелинейных блоков 4 и 16 каналов обратных связей по току станут равными нулю, каналы обратных связей по току
51
разомкнутся, двигатель работает на участках BN характеристик (фиг. 2). Амплитуда напряжения на выходе преобразователя частоты 2 определяется уровнем сигнала задания скорости Ujg, и частота преобразователя частоты Kig формируется как сумма частот импульсных последовательностей KlfjO импульсного датчика скорости 10 и частоты к, , соответствующей уровню задания частоты тока ротора
UfroПри увеличении скорости до уровня ограничения на выходе управляемого нелинейного блока обратной связи по скорости 13 появится сигнал (/„с пропорциональный разности сигнала {1щ, поступающего с выхода преобразователя 12 частота-напряжение, пропорционального частоте импульсной последовательности на выходе импульсного датчика скорости и сигнаа ll ((Jjcl зависящего от уровня сигнала задания скорости Uoc
- KiMCUu t oTctf ec) сигнал переается на вычитающий вход второго блока суммирования 7, где он сравнивается с сигналом задания скорости. Сигналы на входе регулятора скорости 6, и, как следствие, на входе канала управления амплитудой преобразователя уменьшаются. Привод переходит в режим ограничения скорости (участка А-В характеристик фиг.2). При работе привода на частичных арактеристиках Djj обеспечивается автоматическая перестройка Уравнений ограничения скорости и тока за счет изменения UOTC коэффи2118436
циента усиления усилителя г. регули- , руемьтм коэффипяентом усиления з функции сигналов и
5с
Таким образом в частотно-управ- 5 ляемом тяговом электроприводе нелинейные блоки реализуют заданные функции из ограниченного числа линейных участков, а в каналах управления предусмотрена автоматическая пере0 стройка точек отсечки, уровней ограничения тока, момента и потокаs что в сравнении с известными аналогами упрощает схему, исключает возможность опрокидывания двигателя и уп5 рощает эксплуатацию привода, так как не требуется специальная перестройка регуляторов при изменении уровней сигнала задания и режима нагрузки,
О
Введение второго контура положительной обратной связи по току с воздействием на частоту тока ротора 8 сочетании с двумя нелинейными бло5 ками обратной связи по току, формирующими сигналы на двух участках ло различным алгоритма, обеспечивает работу электропривода при моментах,- больших номинального; в режиме
0 с постоянным, близким к допустимому по условно насыщения магнитным пото- KOMj и регулирование момента на этих участках только за счет частоты тока ротора. Это позволяет при неизмен- 5 ной установленной мощности силового оборудования в несколько раз увеличить перегрузочную способность электропривода, что приводит к увеличению его быстродействия.
i
s
to
NJ
S
s
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072231A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072230A1 |
| Частотно-управляемый тяговый электропривод | 1984 |
|
SU1252902A1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-управляемый асинхронный электропривод | 1982 |
|
SU1083316A1 |
4
.v
2
фаг. 2
3 ,M
| Устройство для управления асинхронным короткозамкнутым двигателем | 1978 |
|
SU752722A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент ФРГ № 1563228, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072230A1 |
