Изобретение относится к области дорожностроительной техники и может быть использовано для измерения профиля дорог и оценки качества работы дорожно-строительной техники при сооружении земляного полотна и дорожной одежды.
Известен профилограф для оценки качества поверхности дорог, состоящий из рамы, поворотной относительно ее ходовых колес. Этот прибор снабжен контрольными рейками, расположенными по длине фермы и удаленными относительно оси поворота фермы на расстояния, соответствующие уровню контролируемого слоя.
Однако известный профилограф не дает точного представления о состоянии поверхности земляного полотна или покрытия, не позволяет производить автоматическое измерение и запись поперечного профиля непрерывно при перемещении профилографа и имеет низкую производительность.
Цель изобретения - обеспечить автоматизацию измерения и контроля ровности замеряемой поверхности.
Это достигается тем, что профилограф дополнительно содержит осциллограф с потенциометрическим сопротивлением, датчик угла поворота и брус горизонта с механизмом поворота, причем датчик профиля выполнен в виде поворотного двуплечего рычага, одно плечо которого контактирует с замеряемой поверхностью и механически соединено с потенциометрическим сопротивлением, а второе плечо через пружину соединено с рамой, при
этом брус горизонта, на оси которого закреплен датчик угла поворота, шарнирно прикреплен к раме.
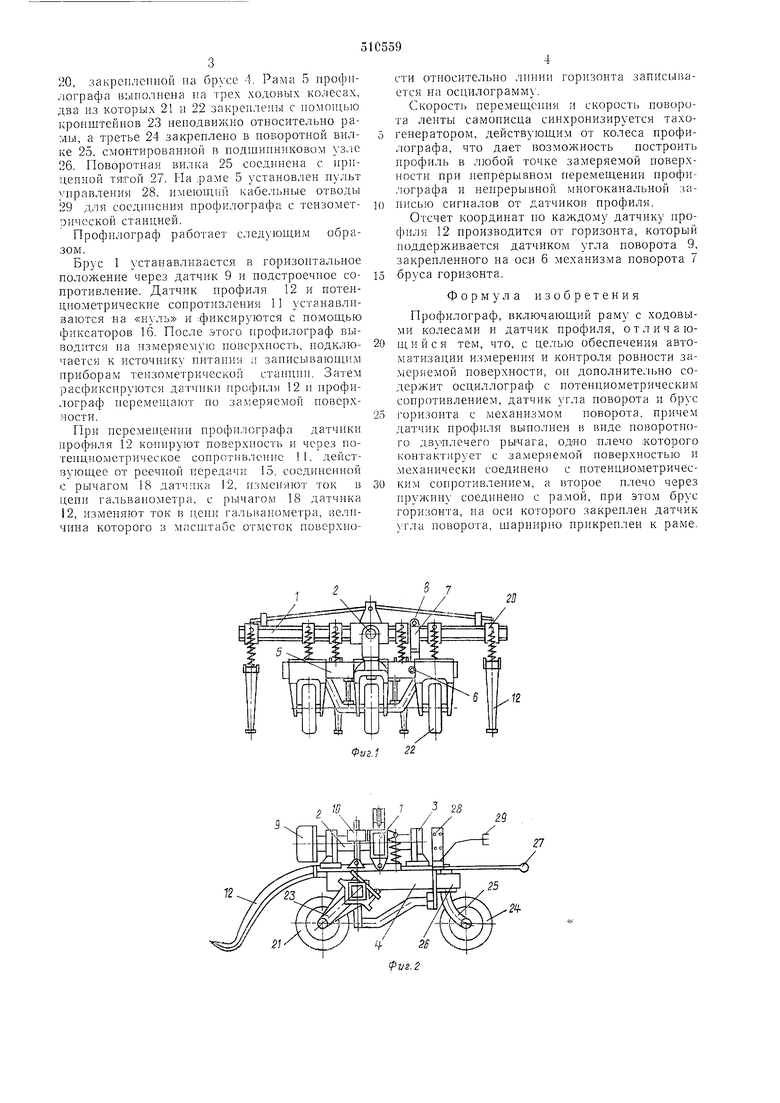
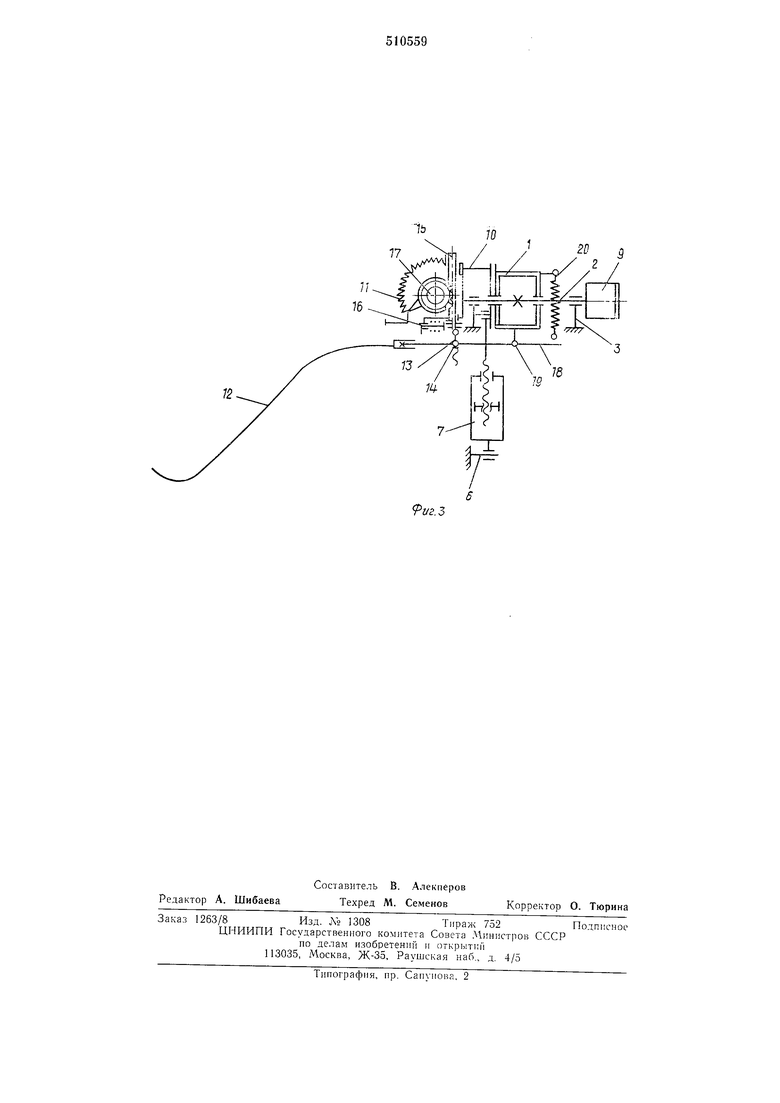
Предлагаемый профилограф схематически изображен на фиг. 1 и 2 (вид спереди и сбоку). Па фиг. 3 дана кинематическая схема профилографа.
Профилограф состоит из бруса 1 горизонта, закрепленного шарнино с помощью оси 2, и стоек 3 на брусе 4 рамы 5, на которой закреплен на оси 6 механизм 7 поворота бруса 1, соединенный с брусом шарниром 8. На оси горизонта жестко закреплен датчик 9 угла поворота. В корпусе 10 установлено потенциометрическое сопротивление 11, соединенное с осциллографом, на которое воздействует датчик профиля 12 через регулируемую тягу 13 с осью шарнира 14, рейку 15 с подпружиненным фиксатором 16 установки и настройки «нуля и скользящий контакт 17.
Датчик профиля 12 закреплен на двуплечем рычаге 18 поворотом относительно оси 19, причем одно плечо рычага контактирует с замеряемой поверхностью и соединено через тягу 13 и рейку 15 с потенциометрическим
сопротивлением 11, а второе - с пружиной
3
20, закреилепной на брусе 4. Рама 5 профилографа выполнена на трех ходовых колесах, два из которых 2 н 22 закреплены с номощыо кронштейнов 23 ненодвижно относительно рамы, а третье 24 закренлено в поворотной вилке 25, смонтированной в подшипниковом узле 26. Поворотная вилка 25 соединена с придепной тягой 27. На ;раме 5 установлен иульт Управления 28, имеюиип кабельные отводы 29 для сосднпсния профилографа с тензометоической станцией.
Профилограф работает следующим образом.
Брус 1 устанавливается в горизонтальное положение через датчик 9 и подстроечиое сопротивлеиие. Датчик профиля 12 и потенциометричеекие сонротивлеиия 11 устанавливаются на «нуль и фиксируются с помо1Ш,ью фиксаторов 16. После этого ирофилограф выводится на измеряемую иоверхпость, подключается к источнику питания и заиисываюи1им приборам тензометрической станини. Затем расфиксируются датчики профиля 12 и профилограф перемешают по замеряемой поверхности.
При перемеп1,ении профилографа датчики профиля 12 коиируют поверхиость и через потепциометрическое сопротив,1снис 11, действуюш,ее от реечной передачи 15, соединенной с рычагом 18 датчика 12, изменяют ток в цепи гальванометра, с рычагом 18 датчика 12, изменяют ток в цеии гальванометра, 15еличина которого в мр.сштабе отметок поверхио4
сти относительно линии горизонта записывается на осцилограмму.
Скорость перемеплеиия и скорость пово)ота леиты самописца синхронизируется тахогенератором, действующим от колеса профилографа, что дает возможность построить профиль в любой точке замеряемой поверхности при непрерывном перемещении профилографа и непрерывной многоканальной заиисью сигналов от датчиков профиля.
Отсчет координат по каждому датчику профиля 12 производится от горизонта, который поддерживается датчиком угла поворота 9, закрепленного на оси 6 механизма поворота 7 бруса горизонта.
Формула изобретения
Профилограф, включающий раму с ходовыми колесами и датчик профиля, отличающийся тем, что, с целью обеспечения автоматизации измерения и контроля ровности замеряемой поверхности, он дополнительно содержит осциллограф с потенциометрическим сопротивлением, датчик угла поворота и брус
1-оризонта с механизмом поворота, причем датчик профиля выполнен в виде поворотного двуплечего рычага, одно плечо которого контактирует с замеряемой поверхностью и механически соединено с потенциометричесКИМ сопротивлением, а второе плечо через пружину соединено с рамой, при этом брус горизонта, на оси которого закреплен датчик угла поворота, шарнирно прикреплен к раме.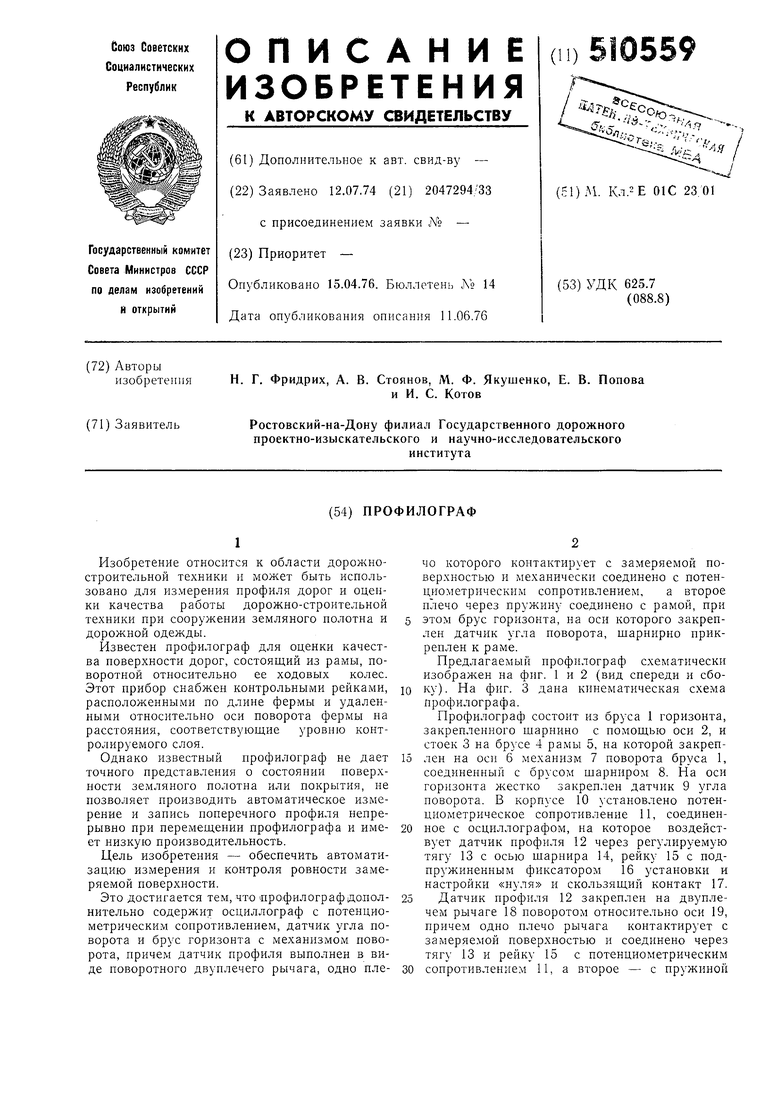
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОФИЛОГРАФ | 2004 |
|
RU2270286C2 |
| БЛОЧНО-МОДУЛЬНОЕ КОННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1994 |
|
RU2097244C1 |
| БЛОЧНО-МОДУЛЬНОЕ КОННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2238870C2 |
| Широкозахватное почвообрабатывающее орудие | 1982 |
|
SU1042636A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ТЕХНИКО-ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ ДОРОЖНОЙ ОДЕЖДЫ | 1998 |
|
RU2148691C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РОВНОСТИ ПОВЕРХНОСТИ АЭРОДРОМНОГО ПОКРЫТИЯ | 2008 |
|
RU2373323C1 |
| Ирригационная машина для обработки картовых оросителей | 1950 |
|
SU89649A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СРЕДНЕГО УКЛОНА ЭЛЕМЕНТАРНОЙ ПЛОЩАДКИ В ПОЛЕВЫХ УСЛОВИЯХ И ПРОФИЛОГРАФ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2560752C2 |
| Широкозахватное почвообрабатывающее орудие | 1984 |
|
SU1189363A1 |
| МЕХАНИЗМ НАВЕСКИ ГРЕЙДЕРА-ПЛАНИРОВЩИКАНА ТРАКТОР | 1970 |
|
SU268281A1 |
12
5 7
Фг/г 2
,3 S8
29
12
