1
Известен линейный электрический двигатель, содержащий магнитопровоц, образуто. ший переменно«-полкх;ную вдоль движения систему, и якорь с обмоткой, разделенной на секции, сдвинутые на половину полюс ног о деления и подключенные к : одновре.
менно коммутируемым злемента, коммута тора,/ управляемого датчиком положения, причем в каждый момент времени секции, расположенные между полюсами, выполняют функции обмотки возбуждения, э секции, расположенные над полюсами, вьтолн$пот функции якорной бмотки
Цель изобретения - упрощенисэ конструк . ции двигателя и повьлиение его надежности.
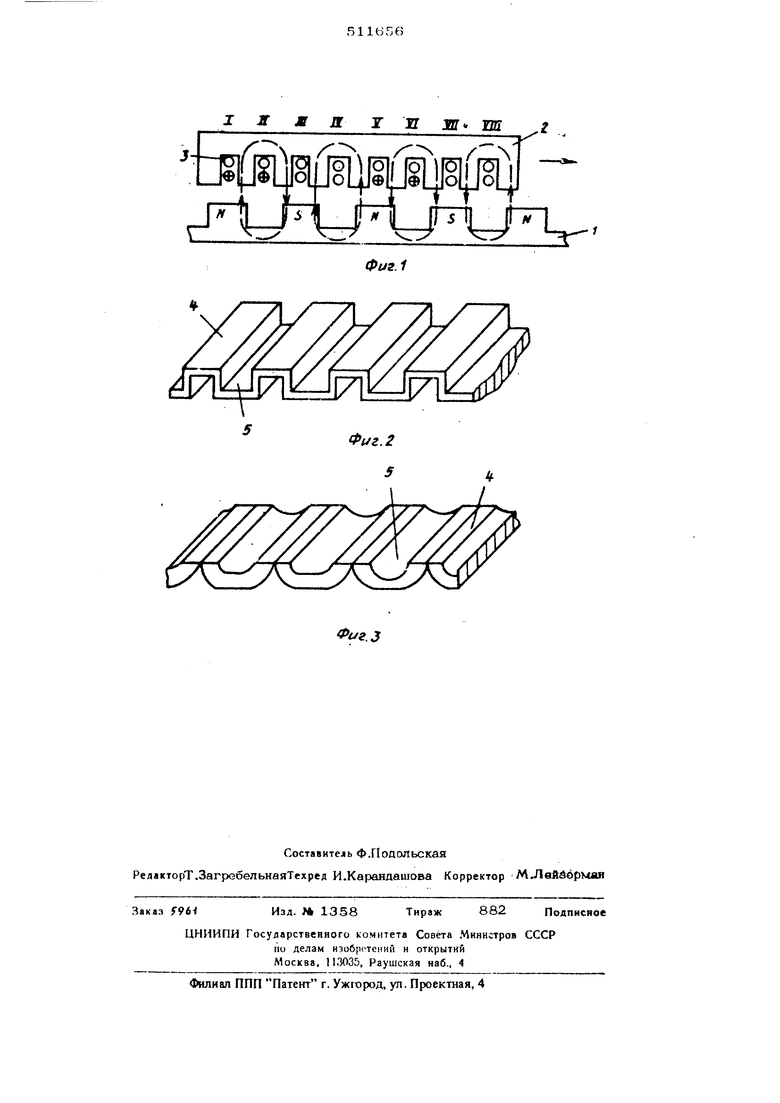
Это достигается тем, что в описываемом двигателе магнитопровод выполнен в виде поперечных ферромагнитных брусьез, соединенных между собой продольными ферм ромагнитными перемычками, а якорь выпол- ней однопакетным.
Мвгнитопровод, образующий переменнош. полюсную вдоль движения систему, может быть выполнен неподвижным, а якорь с
; обмоткой «. подвижным ИЛИ ннободот..
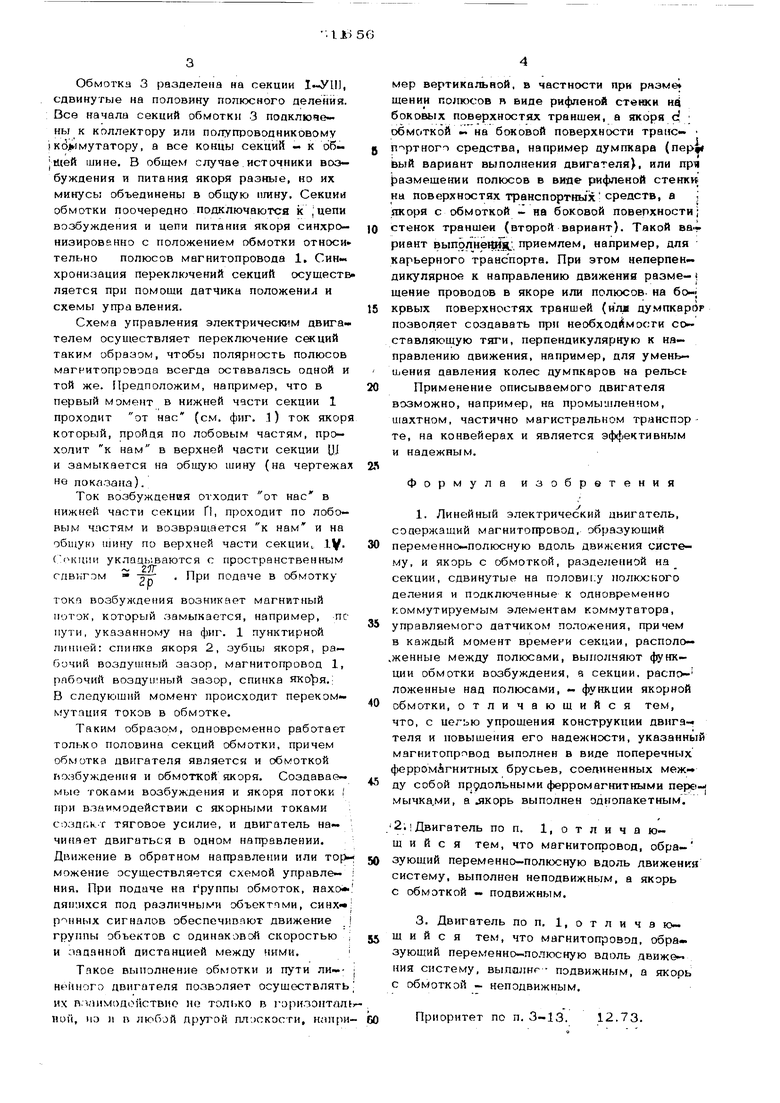
На фиг. 1 схематически показан описы ваемый электрический двигатель; на фиг. 2, 3 - магнитопровод, |возможные вариан ты выполнения.
Электрический двигатель состоит из магнитопровода 1 и якоря 2 с обмоткой 3.
Возможны два,варианта выполнения двигателя.
При первом варианте магнитопровод 1, выполненный в виде поперечных ферромаг нитных брусьев 4, соединенных между со« бой продольными перемыч ками 5, располо жен неподвижно вдоль направления движе. ния. В том же|направлении на движущейся тележке (на чертежах не показана) распо ложен однопакетный якорь 2 с разверну.тсй двухслойной обмоткой 3.
При кгором варианте обращенный элект- родвигатет. имеет магнитопровод 1, расположенный на движущейся тележке (или магннтопроводом служит рифленая поверхность ферромагнитного кожуха ниж«« ней части тележки), а якорь 2 с обмоткой 3 расположен неподвижно вдоль направления движен11Я.
Обмотка 3 разпелена на секции , сдвинутые на половину полюсного деления. Все начала секций об(/отки 3 подклюне ны к коллектору или полупровопниковому (ко 1мутатору, а все концы секций - к об- |шей ijJHHe, В общем случае источники возбуждения и питания якоря разные, но их минусы объединены в общую пшну. Секций обмотки поочередно подключаются к ,цепи возбуждения и цепи питания якоря синхро- низировенно с положением обмотки относи тельно полюсов магкитопровода 1, Синхронизация переключений секций осуществляется при помощи датчика положения и схемы упра вления.
Схема управления электрическим двигателем осуществляет переключение сосций таким образом, чтобы полярность полюсов магнитопровоаа всегда оставалась одной и той же. Предположим, например, что в первый момент в нижней части секции 1 проходит от нас (см. фиг, 1) ток якоря который, пройдя по лобовым частям, проходит к нам в верхней части секции )J и замыкается на общую шину (на чертежах
не показана).
Ток возбуждения отходит от нас в нижней части секции П, проходит по лобовым частям и возвращается к нам и на общую шину по верхней части секции IV(окнии укладываются с пространственным
сдвигом -ртг- , При подаче в обмотку (р
тока возбуждения возникает магнитный поток, который замыкается, например, пс пути, указанному на фиг. 1 пунктирной линией: спиггка якоря 2, зубцы якоря, рабочий воздушный зазор, магнитопровод 1, рабочий воздуи НЬ Й зазор, спинка яко)я,| В следующий момент происходит перекоммутация токов в обмотке.
Таким образом, одновременно работает только половина секций обмотки, причем обмотка двигателя является и обмоткой возбуждения и обмоткой якоря. Создаваемые токами возбуждения и якоря потоки ( при взаимодействии с якорными токами создг.к.г тяговое усилие, и двигатель начиняет двигаться в одном направлении. Движение в обратном направлении или тор-« можение осуществляется схемой управле- i ния. При подаче на группы обмоток, дяп.ихся под различными объектами, синх« : ранных сигналов обеспечивают движение группы объектов с одинаков: скоростью ; и заданной дистанцией между ними,
Такое выполнение обмотки и пути ли-венного двигателя позволяет осуществлять их вл и1модонствио но только в гарилоитал uoii, иэ ii п любой другой ап;)скости, например вертикальной, в частности при разме щении полюсов в виде рифленой стегаси не| боковых поверхностях транщеи, а якоря с обмоткой - на боковой поверхности транс-
п- ртноп средства, например думпкара (nepi Ьый вариант выполнения двигателя), или при эазмешении полюсов в випе рифленой стенкк на поверхностях транспортных средств, а ; якоря с обмоткой на боковой поверхности;
стенок траншеи (второй вариант). Такой ва. риант выполнеш ; приемлем, например, для карьерного транспорта. При этом неперпен- дикулярное к направлению движение разме- щение проводов в якоре или полюсов- на бо-крвых поверхностях траншей (иля думпкарор позволяет создавать пр необходимости составляющую тяги, перпендикулярную к направлению движения, например, для умень- шения давления колес думпкаров на рельсь
Применение описываемого двигателя
возможно, например, на промышленном, шахтном, частично магистральном транспорте, на конвейерах и является эффективным и надежным,
Формула изобретения
1. Линейный электрический двигатель, соаержащий магнитопровод, образующий
переменно-полкюную вдоль движения сист&му, и якорь с обмоткой, разделенной на секции, сдвинутые на полови :у полкхного деления и подключенные к одновременно коммутируемым элементам коммутатора,
управляемого датчиком положения, причем в каждый момент времени секции, располо- .женные между полюсами, выполняют функции обмотки возбуждения, а секции, расположенные над полюсами, - функции якорной
обмотки, отличающийся тем, что, с цегью упрощения конструкции двигателя и повышения его надежности, указанный магнитопрпвод выполнен в виде поперечных ферромагнитных брусьев, соединенных меж-
ду собой пр,9дольными ферромагнитными мычка.ми, а дкорь выполнен однопакетным.
.2,1 Двигатель по п. 1, о т л и ч а ющ и и с я тем, что магнитопровод, образующий переменно-полюсную вдоль движения систему, выполнен неподвижным, а якорь с обмоткой - подвижным.
3, Двигатель поп, 1,отличающ и и с я тем, что магнитопровод, обра« зуюший переменно-полюсную вдоль движения систему, вы пал кг подвижным, а якорь с обмоткой - неподвижным.
Приоритет по п. 3-13. 12.73,
I Ж ЯП г U ж Ш
Фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный электрический двигатель | 1976 |
|
SU657538A1 |
| Линейный двигатель постоянного тока | 1978 |
|
SU792517A2 |
| Линейный двигатель постоянного тока | 1975 |
|
SU551770A1 |
| МОДУЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2012 |
|
RU2510121C2 |
| Линейная электрическая машина | 1980 |
|
SU877731A1 |
| Линейный электрический двигатель | 1974 |
|
SU501453A1 |
| Линейный двигатель постоянноготока | 1973 |
|
SU509956A1 |
| Линейный двигатель постоянного тока | 1979 |
|
SU851675A1 |
| Линейный электрический двигатель постоянного тока "Подэлин | 1979 |
|
SU1001347A1 |
| Линейный электрический двигатель | 1978 |
|
SU792510A1 |
иг.з
