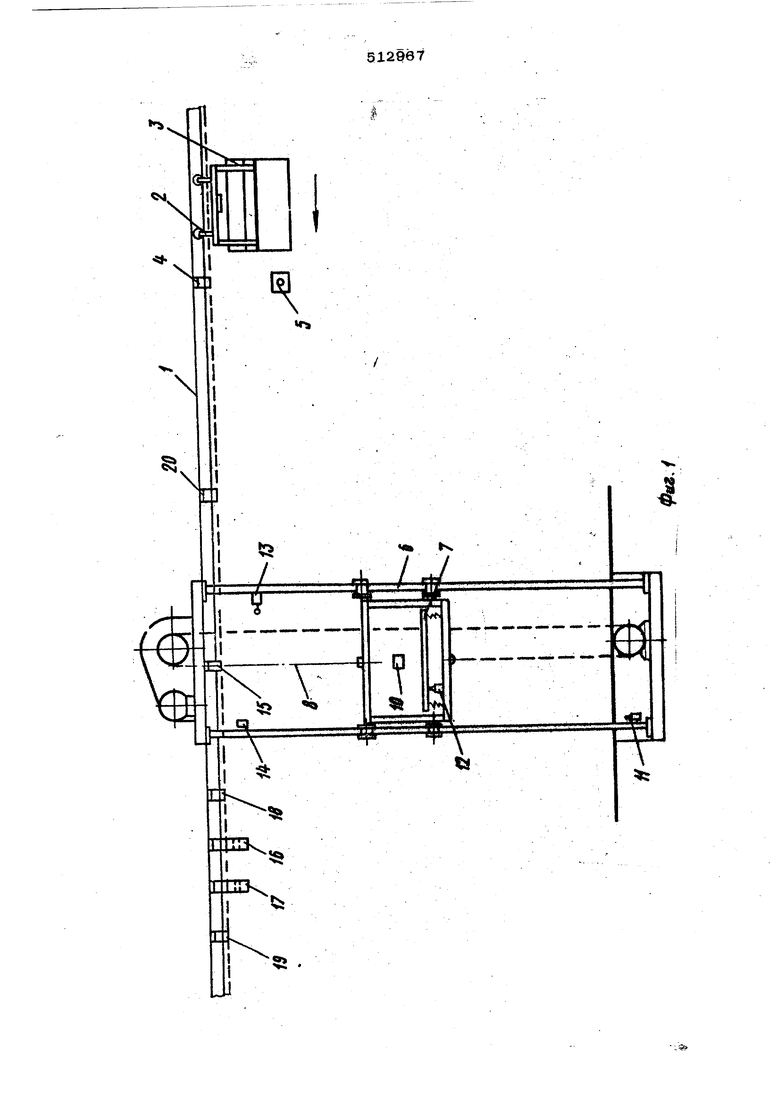
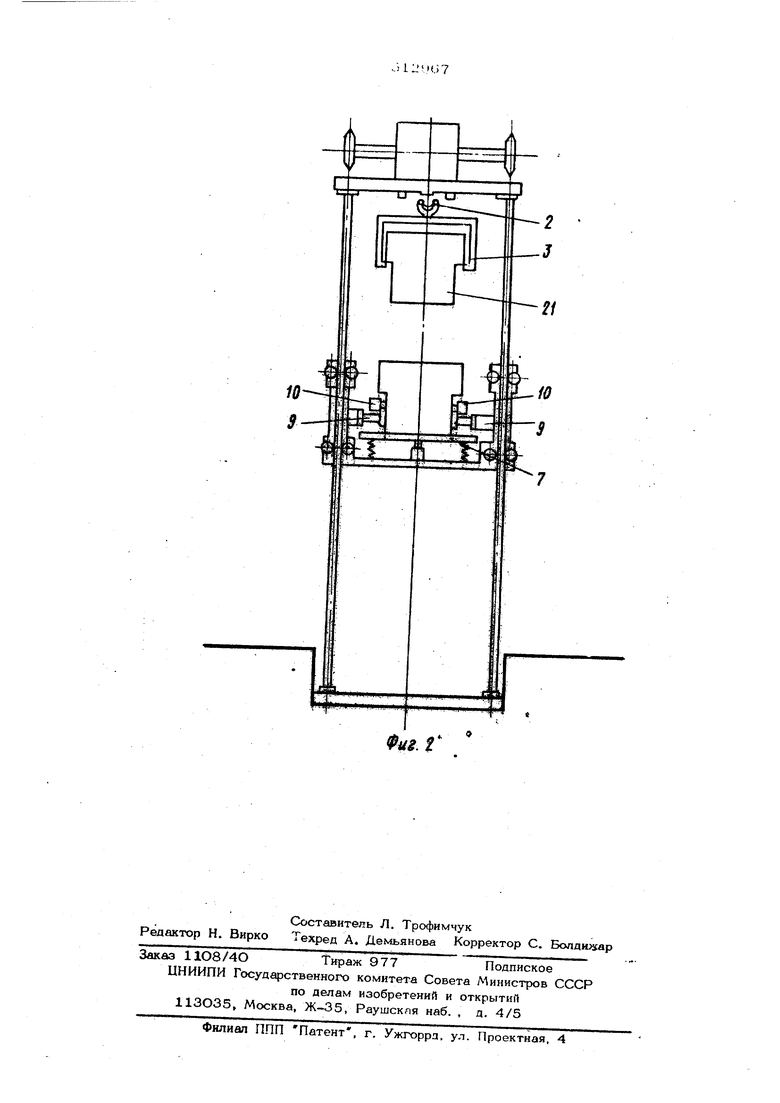
(54) УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ;;а пслтъемника вверх снабжен взаимояействуюшими сю считывателями адреса латчик;зми нижнего и промежуточных) положе- vKfir стоЛа и связанным с приводом прижиг-(1В яа1-чиком верхнего положения стола; ii| rt3ToM в систему автоматического управ- .jf5irt k включены устройства аварийной оста itoBWf конвейера, например, электромагиит е Датчики, установленные по ходу конвеifepfa перед кажлЬтм подъемником и святэан rv;ie с датчиками нижнего положения стола г Ъаъемн.иков. Такое выполнение устройства для траиспортировки грузов позволяет использовать кйждый подъемник для загрузки или разгрузки конвейера в зависимости от адреса груза, что сокращает их количество, выевобождает производственную площадь и дает возможность более рационально разместить связанное с устройством технологическое оборудование. Кроме того, описанная схема системы автоматического управления устройством тчфаптирует его безаварийную работу. На фиг. 1 схематически изображена часть устройства для траспортировки груGOB ( подъемник с примыкающим к нему участком конвейера), вид спереди ,на фиг.2устройство, вид сбоку. На ходовом, пути 1 конвейера размешен квретки 2 с подвесками 3, на которых закреплены адресоносители (на чертеже не показаны). Перед подъемником по ходу конiJeficpa ( направление движения грузов на чертеже указано стрелкой) размешены считыватель адреса 4 (например, набор электро магнитных датчиков) и датчик 5 наличия груза на подвеске ( например, фотореле). В направляюших 6 подъемника установлен с возможностью вертикального перемещения стол 7, подвешенный на цепях 8, связанных с приводом ( па чертеже не показан). На столе 7 размешены боковые пр1гжимы 9 в виде встречно установленнь х пневмоцилиндров и датчики 1О боковой фиксации rp,v3a. В соответствующих местах подъемника расположены датчик 11 нижне1 о положения стола, датчик 12 наличия груза на столе, датчик 13 промежуточного положения стола и датчик 14 ьерхнехх) положения стола (датчики 11-14 пред- ставляют собой, например, путевые коие-Ч- 1ь(е гзыключатели). .На уроБне расположения подвески на хоаовом пути конвейера по оси подъемника установлен датчик 15 ( например, электромагнитный) совмещения.оси подвески с осью подъемника. Зп подъемником по ходу конвейера науровне расположения подвески размешеггы 674 уст юйство 1в сброса адреса и ядресончтель 17. Им предшествует датчик 18 (на-, пример,, электромагнитный) выхода подвески за пределы подъемника, а за адресовагелем установлен .выключатель 19, также представляюишй собой, например, электромагнитный датчик.| На ходовом пути конвейера непосредственно перед подъемником расположено устройство 2О ( например, электромагнитный датчик) аварийной остановки конвейера. 1УстроЙство для транспортировки грузов i i работает следующим образом, Когда к соответствуюшему подъемнику , подходит свободная подвеска 3, несущая I адрес 1загрузки, то при наличии сигналов датчик 5 об отсутствии груза на подвес-i ке, датчика 11-ю нахождении стопа 7 в нижнем положении подъемника, датчикаj 2 о наличии груза 21 на столе 7 и датчиков l6 - о боковой фиксации груза от i считывателя 4 подается команда привода подъемника для перемещения стола 7 в ; верхнее положение. При срвмещении оси подвески 3 с осью подъемника от датчика 15, при наличии сигнала от датчика 14 о нахождении стола в верхнем положении, подается команда прижнмам 9 на разжим груза 21, после чего от датчиков 1О, контролирующих расфиксацию, подается команда на привод подъемника для переме.щения стола в нижнее положение. При этом груз остается висеть на подвеске 3, которая перемещает его за пределы подъемника, где датчик 18 включает устройство 16, ликвидирующее старый адрес, и адресователь 17, задающий новый. Выключатель 19 при дальнейшем перемещении под;вески выключает оба устройства.; Если к подъег ику подходит груженая подвеска 3 с соответствующим адресом разгрузки, то при наличии сигналов дат|4ика 5 о наличии груза на подвеске, датчика 11 - о нахождении стола в нижнем положении и датчика 12 - об отсутствии на столе груза от считывателя 4 подается команда на включение привода подъем ника для поремешения стола 7 в промежуточное положение. При совмещении оси i подвески с осью подъемника от датчика 5, при наличии сигнала датчика 13 о нахож- дении стола в- промежуточном положении, подается сигнал на привод подъемника для перемещения стола в верхнее цопожеиие, контролиру мое датчиком 14. При ЭТОМ стол припод1.лм.ает грзз 21 и ОСРО- , бождает подвеску 3, а датчик 12 подает сигна.1 прижимам 9 на фиксацию груза. .KOHTponnpyeNfyra датчиками lO. Стол налодится в BepxHeNi положении до тех пор,пока подвеска пе выйдет эа пределы подъемника. После этого от датчика 18 подается сигнал на включение привода подъемника для перемещения стола 7 в нижнее положе ние, контролируемое датчиком 11. Одновременно датчик 18 включает устройство 16, ликвидирующее старый аарес на подвеске 3, и адресователь 17, задающий новый. Выключатель 19 при дальнейщем перемещении подвески выключает устройство 16 и адресователь 17. Если в конце цикла загрузки или разгрузки в результате неисправности стол 7 не возвращается в крайнее ,: нижнее положение, контролируемое датчиком 11, возникает угроза его столкновения с грузом следующей подвески при ее прохождении через зону подъемника. В этом случае при прохождении указанной подвески от устройства 2О подается сигн1Л на остановку привода конвейера. Формула изоб р е т е н и я 1, Устройство для транспортировки грузов, включающее подвесной конвейер, подъе .НИКИ для его загрузки и разгрузки, снабженные приводными столами с боковыми упорами для фиксирования груза, и систему автоматического управления, содержащую адресователи, адресоносители, закрепленные на подвесках конвейера блоки управления движением стола подъемника вверх, снабженные считывателями адреса, установленными перед подъемниками по ходу конвейера датчиками наличия груза на столе подъем ника, и блоки управления движением стопа |, подъемника вниз, отличающееса тем, что, с иелью обеспечения возможности работы каждо. подъемника 8 режиме как загрузки так в разгрузки в зависимости ., от адреса подвески, боковые упоры стола подъем лика выполнены в виде встречно-под-; вижных прижимов; блок управления движением стола подъемника вниз содержит смонтированные на столе датчики фиксации гру. за и датчик выхода подвески за пределы подъемника, а блок управления движением стола подъемника вверх дополнительно снаб,жен сблокированным со считывателем датчиком наличия груза на подвеске конвейера и связанным с приводом прижимов датчиком совмещения оси подвески с осью подъемнн- . ка, при этом система автоматического управ, лення снабжена устройствами для сброса 1 адреса на адресоносителе подвески, причем устройства для сброса адреса и адресователи последовательно установлены по ,ходу конвейера за каждым подъемником. 2, Устройство по п. 1, о т л и ч а ю щ е е с я тем, что , с целью обеспечения безаварийной работы, блок управления движением стола подъемника вверх снабжен взаимодействующими со считывателем адреса датчиками нижнего и промежуточшого положений стола и связанным с приводом прижимов датчиком верхнего положения стола, при этом в систему автоматического управления включены устройства аварийной остановки конвейера, например электромагнитные датчики, установленные по ходу конвейера перед каждым подъемником и связанные с датчиками нижнего положения стола подъемников.
Фиг. f