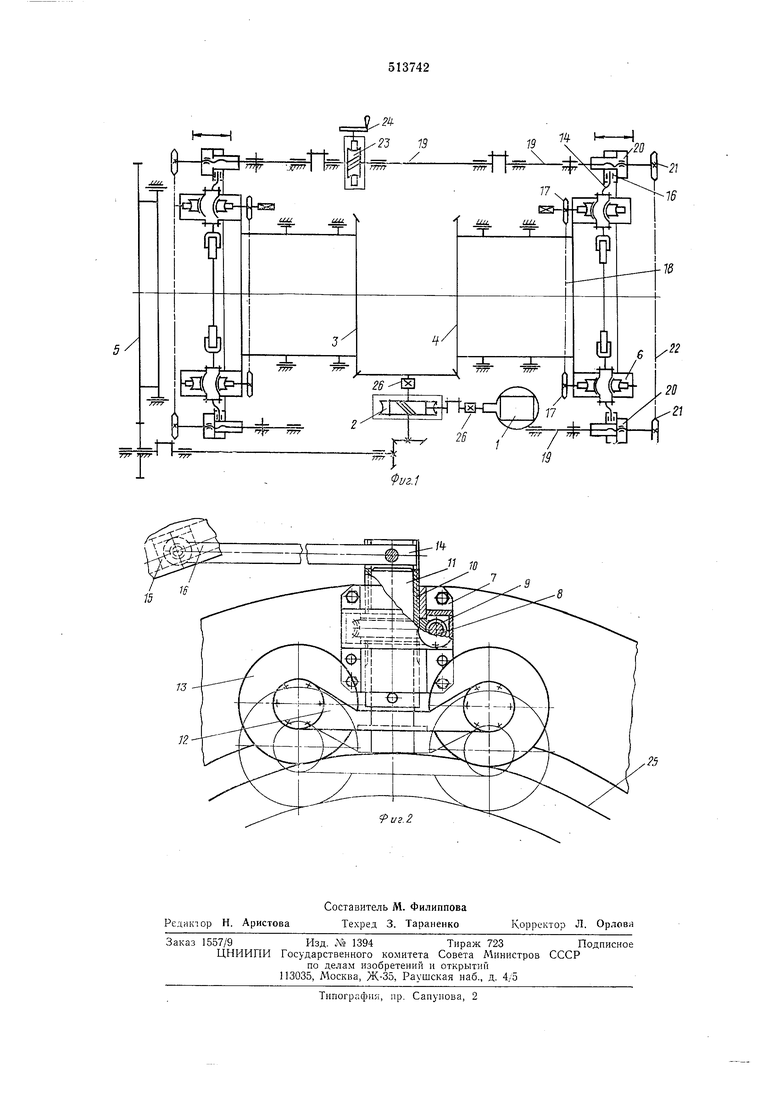
щыо втулочно-роликовой цепи 18, получающей движение от ручиого привода и звездочек 17, передается вращение чсо.яку 8, а через него червячному колесу 9 и втулке 10, имеющей резьбу на наружной поверхности, за счет чего происходит дополнительное одновременное поджатие всех роликов 13, то есть самоцентрация устройства.
От двигателя 1 через червячный редуктор 2 с маховиками 26 вращение передается рабочим роторам 3, 4, и 5, а, следовательно, и механизмам 6 передвижения.
Управление плавным бесступенчатым передвижением устройства вперед-назад осуществляется вращением маховика 24, который насажен на нал червячного редуктора 23, который кинематически связан с концентрической направляющей 16, нолучающей одновременпо неоднозначно направленное перемещение. Перемещаясь влево или вправо, концентричеекая направляющая 16 поворачивает закрепленные и скользящие в ией сухари 15, подвижно соединенные с рычагами 14, которые, в свою очередь, передают вращение втулкам 10, направляющим И, закрепленным на них внлкам 12 и роликам 13. За счет разворота роликов 13 под различными углами к оси по отношению к образующей обрабатываемой трубы 25 осуществляется плавное передвижение устройства. За счет увеличения или уменьшения угла винтовой линии н наличия вращательного движения маховиков 26 осуществляется плавное увеличение или уменьшение скорости передвижения устройства.
Таким образом в устройстве достигается совмещение кинематики рабочих органов с кинематикой органов передвижения за счет установки механизмов передвижения непосредственно на рабочих роторах, что позволяет использовать предлагаемую кинематику для создания устройств, обеспечивающих обработку труб, диаметр которых 219 и более миллиметров.
Формула изобретения
1.Самоходное трубоочистное устройство, механизм передвижения которого связан с двигателем, ус ановленным на раме с укрепленными на ней рабочими роторами, отличающееся тем, что, с целью упрощения конструкции, механизм передвижения смонтирован на торцах роторов.
2.Устройство по п. 1, отличающееся тем, что в корпусе механизма нередвижения установлен винтовой механизм подъема и опускания роликов, выполненный в виде двух винтовых нар, первая из которых образована приводным червяком и червячным колесом, а вторая - червячным колесом, как гайкой, и проходящим сквозь него винтовым стрежнем, связанным с роликами.

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для изготовления профильных изделий из листового металла | 1935 |
|
SU48090A1 |
| АВТОМАТИЧЕСКИЙ СТАЦИОНАРНЫЙ БУРОВОЙ КЛЮЧ | 1956 |
|
SU115325A1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ "ЭСТАФЕТА" | 2007 |
|
RU2352795C2 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Транспортное средство и внутритрубный движитель динамического типа для него | 2017 |
|
RU2668367C1 |
| ПОВОРОТНО-УДАРНЫЙ МЕХАНИЗМ Б.Н.СТИХАНОВСКОГО (ВАРИАНТЫ) | 1995 |
|
RU2095234C1 |
| Прокатная клеть | 1988 |
|
SU1554999A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2033542C1 |
| МОТОБЛОК С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ ПОСТУПАТЕЛЬНОЙ СКОРОСТИ | 2015 |
|
RU2602438C1 |