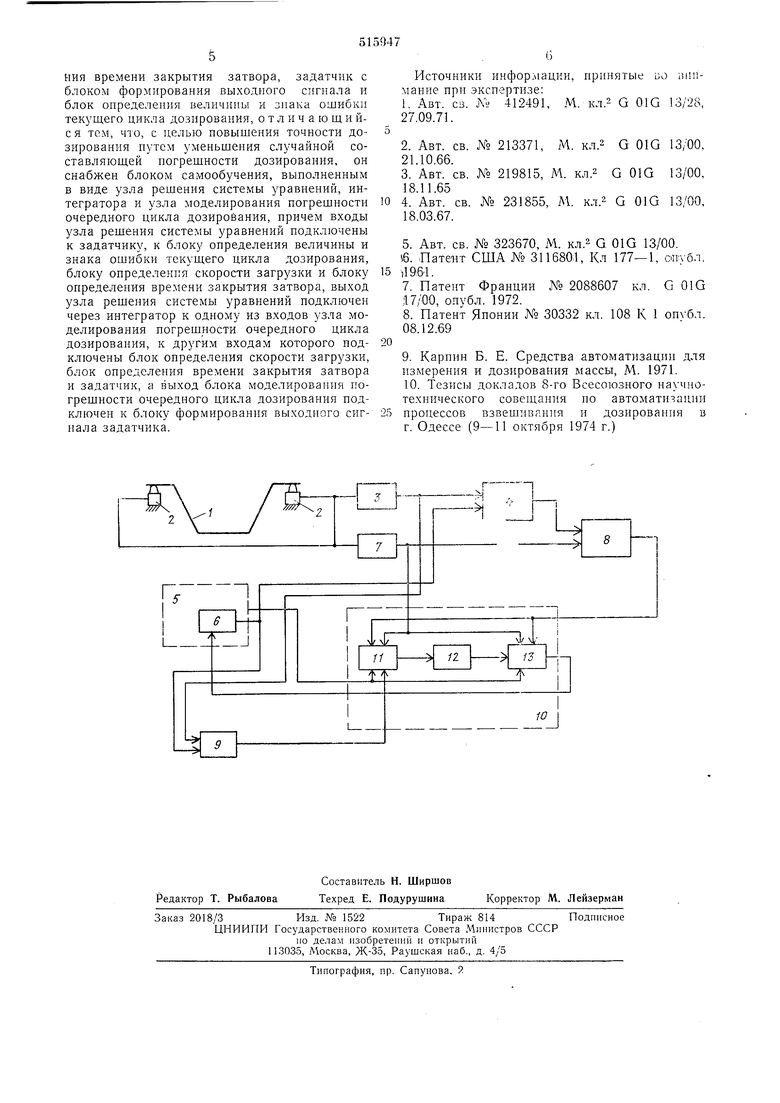
задатчика 5 с блоком 6 формирования выходного сигна.ча. Блок 7 определения скорости связаи с блоком 8 определения времени закрытия затвора. Блок 9 определяет величину и знак ошибки текущего цикла дозирования. Блок самообучения 10 содержит узел 11 решения системы уравнений, интегратор 12 и узел моделирования 13.
Устройство работает следующим образом. При поступлении материала в грузоприемный бункер 1 сигнал с силоизмерительных датчиков 2, пропорциональный массе материала в бункере, подается на входы блока 3 измерения сигнала датчиков 2 и блока 7 определения скорости загрузки. С выхода блока 3 сигнал, пропорциональный текущему значению массы дозируемого материала поступает на один из входов узла сравнения 4, на другой вход которого подается сигнал с блока 6 формирования выходного сигнала задатчика 5.
Этот сигнал пропорционален значению массы материала в грузоприемном бункере, по достижении которого должен быть подан сигнал на закрытие затвора. При равенстве сигналов, постунающих на оба входа узла сравнения, на его выходе появляется команда на закрытие затвора и запуск блока 8 определения времени закрытия затвора. Работа блока 8 заканчивается по сигналу с блока 7 о нрекращении поступления материала в грузоприемный бункер. В ходе дозирования блоком 7 измеряется скорость загрузки К, блоком 9 - реальное значение ошибки АЯ Яф-Р-мп, где РЗИЯ - заданное значение дозы; Рф - фактическое значение дозы после полного закрытия затвора и прекращения поступления материала в грузоприемный бункер.
Реальные значения АР являются случайными величинами. Исследования, проведенные в Куйбышевском филиале института «Оргэнергострой, показали, что величина ЛЯ связана с величинами К, т, а через Рзад - с величиной динамического удара материала о грузоприемпый бункер недетерминированной зависимостью
АЯ . а,К + bf + с.Рзад,
где ui, bi, d - случайные коэффициенты, значения которых зависят от целого ряда неучитываемых факторов;
т - время закрытия затвора.
Именно поэтому непосредственная коррекция задания последующего цикла дозирования по величине АР предыдущего цикла не является эффективной, так как значения соответствующих коэффициентов в этих циклах отличаются друг от друга. По той же причине является малоэффектцвцым, лотя и более точным, метод прогнозирования АР по результатам измерения текущих значений К, т, Рзад и умножения их на значения коэффициентов а, Ь, с, принимаемых постоянными.
Описываемое устройство позволяет наиболее оптимально учесть случайный характер этих коэффициентов путем самообучения дозирующей системы на основе непрерывного получения новой информации об их текущих значениях и статистической обработки этой информации. Это обеспечивает минимальную погрешность дозирования и оптимальное прогнозирование момента подачи сигнала на закрытие затвора текущего цикла.
Процесс самообучения осуществляется блоком 10. Проводится п предварительных циклов дозирования, в результате которых составляется система из п уравнений
P,aiK, + b.-., + CiP,,, АЯ, - aiK + -j -f ,
АЯ„ z а,К, + +
В ходе каждого из п циклов блоками 7, 8 и 9 определяеются их соответствующие значения
К, т АР, которые вместе с Рзад по сгупают на входы узла 11 решения системы уравнений и узла моделирования 13. Полученная система решается узлом 11 относительно коэффициентов а, Ь, с. Рассчитанные значения коэффициентов через интегратор 12, .осуществляющий статистическое осреднение из значений, поступают в узел 13.
Таким образом, на выходе интегратора 12 получаются статистически усредненные по циклам значения коэффициентов а, Ь и с; йп, Ьп, Сп. По этим значениям и по значениям /Сп+1 и Рзад,г41 текущего (п+1)-го цикла, а также по величине т:„ предшествующего цикла с помощью блока 13 прогнозируется значение АРя+1 по модели
АРп+1 а„Кп + 1 + ,« + с„Язад„ + 1 .
Вычисленное значение APn+i поступает на
вход блока 6 формирования выходного сигнала задатчика. Информация, полученная в (л+1)-м цикле дозирования, используется для уточнения значений коэффициентом а, Ь я с, т. е. производится осреднение их значений с
учетом этой информации.
Таким образом, происходит непрерывная адаптация модели. Количество осредненных результатов обусловливается требуемой точностью дозирования. Еесли количество осреднеппых результатов принимается равным п, по получении (га-|-1)-го результата первый результат отбрасывается. Усреднепие всегда осуществляется по п последним результатам дозирования.
Прогнозиро;ван.ие величины АР, 0Сущест1ВШЯеаюе на осеовании решения п уравнений, уменьшает случайную поставляющую погрешности дозирования ЬУ/г раз.
Формула изобретения
Весовюй порциоиньш дозатор, содержащий
грузоприемный бункер, установленный на силоизмерительные датчики, блок измерения
сигналов датчиков, блок определения скорости загрузки, узел сравнения, блок определе(-1ИЯ времени закрытия затвора, задатчик с блоком формирования выходного сигнала и блок определения величины и знака ошибки текущего цикла дозирования, отличающийся тем, что, с целью повышения точности дозирования нутем уменьщения случайной составляющей погрешности дозирования, он снабжен блоком самообучения, выполненным в виде узла решения системы уравнений, интегратора и узла моделирования погрешностн очередного цикла дозирования, причем входы узла решения системы уравнений подключены к задатчику, к блоку определения величины и знака ошибки текущего цикла дозирования, блоку определения скорости загрузки и блоку определения времени закрытия затвора, выход узла решения системы уравнений подключен через интегратор к одному из входов узла моделирования погрешности очередного цикла дозирования, к другим входам которого подключены блок определения скорости загрузки, блок определения времени закрытия затвора и задатчик, а выход блока моделирования погрешности очередного цикла дозирования подключен к блоку формировання выходного сигнала задатчика.
Источники информации, нринятые DO инимание при экспертизе:
1.Авт. св. jXs 412491, М. кл.2 G 01G 13/28, 27.09.71.
2.Авт. св. 213371, М. кл. G 01G 13/00, 21.10.66.
3.Авт. св. 219815, М. кл. G 01G 13/00, 18.11.65
4. Авт. св. № 231855, М. кл. G 01G 13/00, 18.03.67.
5. Авт. св. № 323670, М. кл. G 01G 13/00. Q. Патеит США N° 311680:1, Кл 177-1, онлбл. ,1964.
7.Патент Франции № 2088607 кл. G OlG Д7/00, олубл. 1972.
8.Патент Яионии № 30332 кл. 108 К 1 опубл. 08.12.69
9.Карпин Б. Е. Средства автоматизации для измерения и дозирования массы, М. 1971.
10.Тезисы докладов 8-го Всесоюзного научнотехннческого совещания но автоматизации
нроцессов взвешивания и дозирования в г. Одессе (9-11 октября 1974 г.)
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой порционный дозатор | 1980 |
|
SU879316A1 |
| Автоматический весовой порционный дозатор | 1974 |
|
SU570785A1 |
| Устройство для дозирования компонентов шихты доменного процесса | 1980 |
|
SU935883A1 |
| Автоматический весовой порционный дозатор | 1984 |
|
SU1186956A1 |
| Весовой порционный дозатор | 1979 |
|
SU808864A1 |
| Автоматический весовой порционный дозатор с цифровым управлением | 1981 |
|
SU1000773A1 |
| Устройство для весового порционного дозирования | 1978 |
|
SU697832A1 |
| Весовой порционный дозатор | 1977 |
|
SU648847A1 |
| УСТРОЙСТВО ДЛЯ ВЕСОВОГО ДОЗИРОВАНИЯ ВЕЩЕСТВ, ПОДЛЕЖАЩИХ СМЕШИВАНИЮ | 1986 |
|
SU1387608A1 |
| Устройство управления весовым дискретным дозированием сыпучих материалов | 1986 |
|
SU1425463A1 |
